- 品牌
- 星火博特
- 型号
- 通用
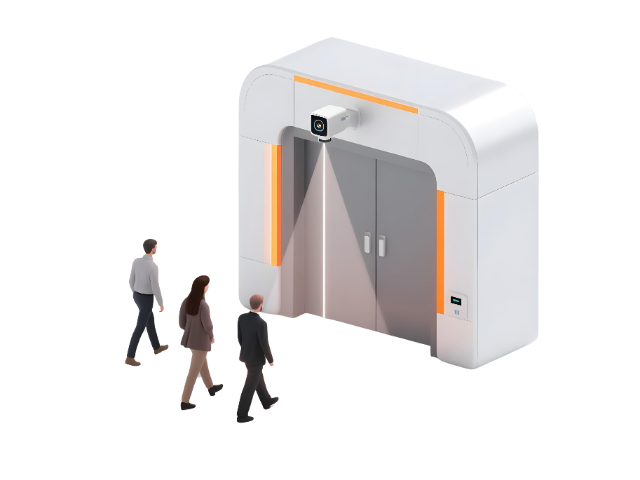
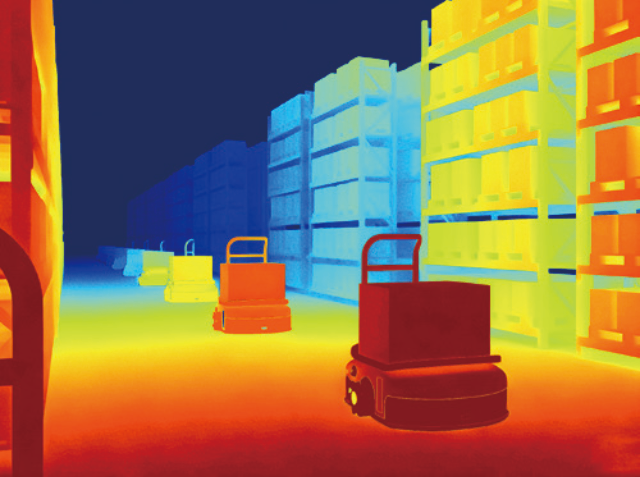
场景:矿山井下巷道,光线昏暗、粉尘多,存在矿车、轨道、碎石、管道等障碍物,地面崎岖不平、有积水,需在高危环境下自主巡检,避免碰撞设备与坠落风险。技术说明:搭载sparkbot 3D激光雷达与3D ToF相机,融合3D ToF与dToF数据,突破单一传感器在昏暗、多粉尘环境下的局限,实现远距离矿车、管道的高精度探测与近距离碎石、积水的广域覆盖。融合多源传感器数据,精确识别障碍物类别、地面材质及可通行区域,构建井下三维环境模型,优化系统延迟,应对矿车移动、碎石掉落等动态场景,智能适应昏暗光照、粉尘环境与地形起伏,保障机器人在井下全天候稳定运行,替代人工完成高危巡检任务。3D TOF相机可高效应用于工业园区周界安防,解决传统周界防护误报率高、夜间防护薄弱的痛点。武汉移动机器人3D相机模块
在山地物流、电站巡检等复杂作业场景中,3D ToF成为无人机的“智慧双眼”,以毫秒级距离探测能力,筑牢飞行安全防线,解锁全场景作业可能。其准确的距离感知的重要优势,为无人机赋予稳定的定高悬停与近距离多维度避障功能,打破复杂环境对无人机作业的限制。 无论是山地库区的物资配送,还是高海拔输电线路巡检,3D ToF都能快速捕捉周边障碍物信息,实时反馈距离数据,让无人机灵活规避树木、山体等障碍,同时准确维持飞行高度,实现平稳悬停作业。这一能力大幅提升无人机智能化水平,推动其摆脱人工操控依赖。 从低空物流的准确投递到工程巡检的高效作业,dTOF传感器持续拓展无人机复杂环境作业边界,减少作业风险与损耗,助力无人机向全自主飞行迈进,为低空经济各类应用场景提供可靠技术支撑。武汉移动机器人3D相机模块sparkbot团队将3D视觉、3D雷达等多传感器融合技术:如激光测距数据、视觉识别数据等,通过。

场景:城市街道、公园,存在行人、非机动车、垃圾桶、井盖、绿化带等障碍物,面临强光、阴天、雨天等天气,地面有积水、落叶、杂物,需自主清扫且避让行人和设施。技术说明:配备sparkbot 3D激光雷达与3D ToF相机,融合3D ToF与dToF数据,实现远距离行人、非机动车的高精度探测与近距离垃圾桶、井盖、落叶的广域覆盖。融合多源传感器数据,精确识别障碍物类别、地面材质及可通行区域,构建城市街道三维环境模型,优化系统延迟,应对行人横穿、非机动车变道等动态场景,智能适应室外光照变化、雨天积水与地面起伏,保障环卫机器人全天候稳定作业,避免碰撞行人和市政设施。
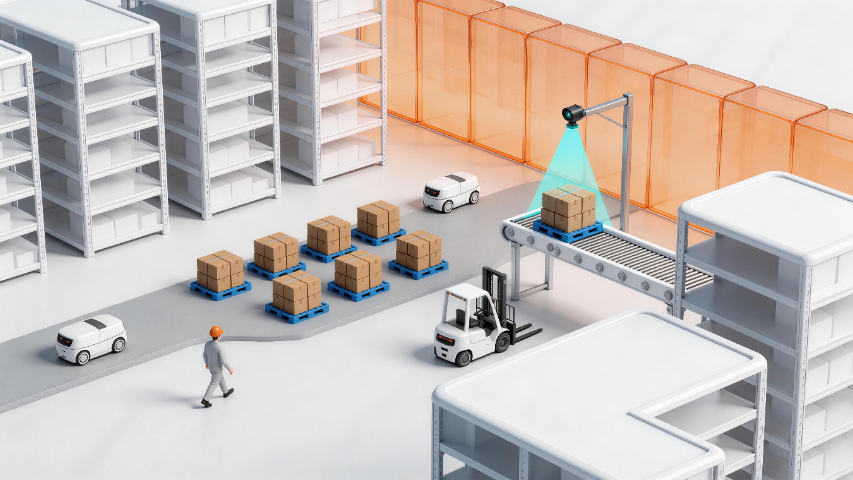
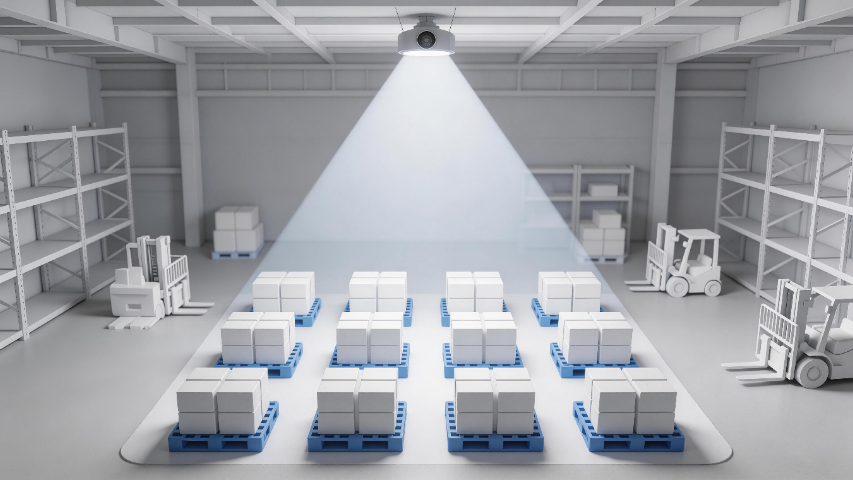
场景:养老院、老年公寓,存在轮椅、拐杖、桌椅、花盆等障碍物,地面平整但可能有积水、杂物,光照柔和,老人行动缓慢,需陪伴、协助老人,避免碰撞老人与物品。技术说明:搭载sparkbot 3D ToF相机,融合3D ToF与dToF数据,突破单一传感器局限,实现近距离老人、轮椅、拐杖的广域覆盖与远距离桌椅、花盆的高精度探测。融合多源传感器数据,精确识别障碍物类别,重点识别老人与可移动辅助设备,构建养老院三维环境模型,深度优化系统延迟,应对老人缓慢移动、拐杖掉落等动态场景,智能适应室内柔和光照与地面平整性,保障机器人安全陪伴老人,提供助老服务,避免碰撞。sparkbot的3D 视觉相机定位解决方案通过深度感知能力,有效定位托盘识别和货架的三维空间数据。
3D ToF无人机复杂环境安全保障场景说明 在茂密林地、城市楼宇峡谷、高压电力巡检等视觉受限场景中,无人机飞行易受遮挡、光线干扰,安全隐患突出,而3D ToF技术成为守护飞行安全的“智慧双眼”,准确构建安全飞行缓冲区。茂密林地中,枝叶交错遮挡视线,3D ToF通过发射红外光脉冲,捕捉光线往返时间差,快速生成实时3D深度地图,准确识别树干、灌丛位置,规避碰撞风险,构建贴合林地地形的缓冲区。城市楼宇峡谷内,高楼遮挡GPS信号,光线明暗不均,3D ToF无需复杂算法,高效提取距离信息,实时感知楼宇间距、墙体轮廓,避免无人机在楼宇间漂移、碰撞,保障低空飞行安全。高压电力巡检场景中,导线、杆塔遮挡视线,3D ToF以毫秒级响应速度,准确测量无人机与导线、杆塔的距离,构建安全巡检缓冲区,助力无人机高效完成巡检任务,规避触电、碰撞隐患。3D ToF凭借紧凑、高效、抗干扰的优势,为各类视觉受限场景下的无人机飞行保驾护航,筑牢安全防线。sparkbot的3D tof相机、3D激光雷达系列产品。武汉移动机器人3D相机模块
杭州星火博特3D视觉相机可提供经济高效的避障解决方案,适配城市道路的复杂环境,助力提升路口通行率。武汉移动机器人3D相机模块
在导航方面,3D视觉技术同样发挥着不可或缺的作用。通过实时获取周围环境的三维数据,机器人能够精确地定位自身在环境中的位置,并规划出到达目标点的较优路径。这种基于3D视觉的导航方式不*可具有高度的灵活性和自主性,还能够有效应对各种动态变化的环境因素,如障碍物的移动、光照条件的变化等。移动机器人在执行导航任务时,可以利用3D视觉传感器不断感知周围环境的变化,并实时更新自身的位置信息。同时,结合预先设定的目标点和约束条件,机器人可以运用先进的路径规划算法,如AI算法、Dijkstra算法等,计算出一条从当前位置到目标点的较优路径。这条路径不*可考虑了距离因素,还综合了安全性、可行性等多方面因素,确保机器人在导航过程中能够避开障碍物、顺利通过复杂地形。随着深度学习技术的不断发展,基于3D视觉的场景识别与导航功能得到了进一步的提升。通过结合深度学习算法,机器人可以从大量的三维数据中学习到更加丰富的特征表示和语义信息,从而提高场景识别的准确性和导航的智能性。例如,利用卷积神经网络(CNN)对三维图像进行特征提取和分类,可以帮助机器人更加准确地识别出场景中的不同物体;武汉移动机器人3D相机模块
杭州星火博特科技有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在浙江省等地区的电子元器件行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为行业的中坚力量,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将助力杭州星火博特科技供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!

社区、园区、商圈等户外末端配送,面临路径复杂、动态障碍物多、定位精度不足等问题,人工配送效率低、高峰期运力紧张。sparkbot 3D TOF相机赋能无人物流车,选用DT950型号,120°超广视角可多方面捕捉周边环境,5米内≤1cm的测距精度确保准确定位,快速规避行人、车辆等动态障碍物。dToF传感器与全局快门相机融合,实现复杂街巷、地下商圈等场景的稳定导航,配合路径规划算法,准确完成快递、餐饮、科研耗材等物资的驳运与配送,日均作业时长可达8.7小时,提升配送效率30%以上,构建城市户外智慧物流“微小血管”。sparkbot推出的3D视觉检测方案有效解决立体仓库堆垛机路径规划、反馈控制及维护...
- 合肥立体仓库3D相机 2026-07-06
- 天津工业3D相机测绘 2026-07-06
- 北京机械狗3D相机导航 2026-07-06
- 济南双目3D相机模组 2026-07-04
- 西安割草机3D相机扫描 2026-07-02
- 成都3D相机模块 2026-07-02
- 上海AGV3D相机厂家 2026-07-02
- 佛山割草机3D相机测量 2026-07-02
- 佛山结构光3D相机扫描 2026-07-01
- 武汉AMR3D相机扫描 2026-07-01

- 郑州机器3D相机打印 2026-06-24
- 郑州AGV3D相机厂家 2026-06-22
- 天津割草机3D相机扫描 2026-06-22
- 北京体积3D相机避障 2026-06-22
- 苏州库位3D相机识别 2026-06-20
- 成都双目3D相机避障 2026-06-18




- 合肥立体仓库3D相机 07-06
- 天津工业3D相机测绘 07-06
- 重庆客流量3D激光雷达避障 07-06
- 北京机械狗3D相机导航 07-06
- 长沙结构光3D激光雷达建图 07-05
- 郑州AMR3D激光雷达定位 07-05
- 佛山货架3D激光雷达打印 07-05
- 佛山AGVTOF相机打印 07-05
- 沈阳托盘3D激光雷达检测 07-05
- 佛山货架TOF相机统计 07-04