- 品牌
- 星火博特
- 型号
- 通用
小区/园区配送机器人借助3D激光雷达,实现无接触准确配送。其360°全向视场角,可识别园区道路、绿化带、围栏、行人、宠物等各类障碍物,灵活规避。30万点/秒的点云速率,能快速构建园区3D地图,结合GPS+RTK定位,实现楼栋、单元门准确定位,误差控制在1cm左右。≤2cm的测距精度,确保机器人准确停靠单元门口、电梯口,避免碰撞车辆、行人。激光雷达结合AI视觉,可区分可移动障碍物与固定设施,毫秒级避障响应,适配园区复杂路况,实现快递、生鲜等物资的自主配送,提升配送效率与便捷度。3D TOF相机可高效应用于工业园区周界安防,解决传统周界防护误报率高、夜间防护薄弱的痛点。佛山AMR3D相机打印

随着市场推进,无人叉车应用愈发多元,涵盖平面搬运、产线对接等场景,正朝着大型化、人机混合等复杂方向发展。国内企业立足实际需求,以可靠产品和柔性方案助力物流转型升级。在高位货架应用中,华南某机器人厂商依托视觉导航优势,完成高位前移式叉车无人化改造,货叉提升高度超9米,已在华南某汽车零配件厂商无人仓库运行,作业效率提升50%。在仓库月台装卸车场景,安装视觉+3D激光导航系统的无人叉车,可应对室外沟坎、车厢凹凸等复杂环境,以30托/小时效率完成出库装车,提升货物周转率。3D激光雷达和3D tof技术在无人叉车传感器中起到了不可或缺的作用。深圳立体仓库3D相机识别sparkbot的aura 灵光系列产品,采用i tof和d tof测量学原理设计,硬件3D 视觉。
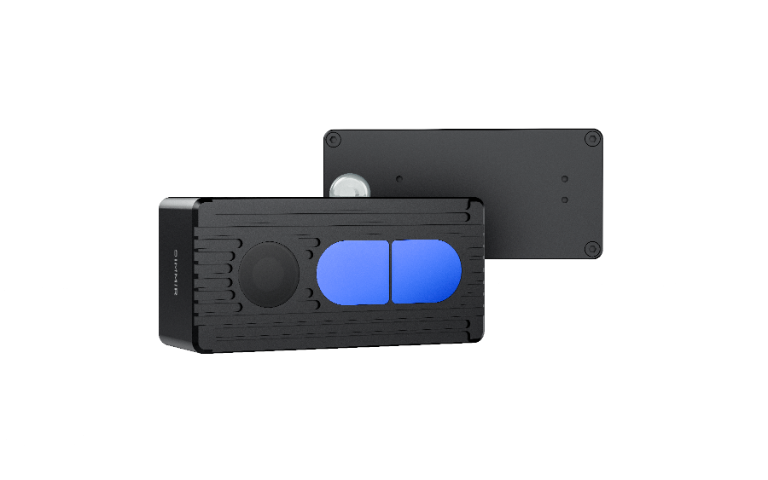
随着工业4.0加速推进,智能化物流设备需求持续攀升,智能叉车作为仓储物流系统的重要装备,其自主性与作业效率直接决定物流链路的顺畅度,而准确识别、操作托盘是实现高效物料搬运的关键前提。 传统2D视觉技术与激光雷达在托盘识别中存在明显局限:复杂环境适配性差,面对不同光照、杂乱背景及高密度堆叠托盘时,识别率低、误报率高,无法准确完成三维位姿识别;鲁棒性与灵活性不足,难以适配不同形状、颜色、材质的托盘,需大量人工调试干预,大幅增加运维成本;难以平衡定位精度与速度,提升精度时会增加计算量,拖累系统实时响应,无法匹配工业高效作业需求。 sparkbot 3D TOF相机有效解决上述痛点,依托ToF技术优势,可准确捕捉托盘三维点云数据,实现复杂环境下的高精度识别定位,无需人工干预即可适配多样化托盘类型。同时,其采用工业级设计,具备IP67防护等级与宽温适配能力,可抵御仓储粉尘、振动等恶劣工况,保障现场长期稳定运行,兼顾识别精度与响应速度,为智能叉车高效作业提供可靠支撑,助力物流仓储智能化升级。
3D视觉体积测量系统组成及应用场景:杭州星火博特3D视觉体积测量解决方案由高性能3D视觉相机、先进体积测量算法和灵活软件平台组成,保障测量精细高效。3D相机内置算力,无需依赖外部CPU即可运行,提升测量速度与精度;3D体积检测软件实时处理三维数据,生成精确长宽高及体积结果并反馈给上层控制系统;即时反馈系统可快速上报检测结果,助力上层自动化决策。该方案广泛应用于物流仓储、制造业等领域,助力企业优化库存、提升效率,减少人工误差与成本。体积测量系统部署注意事项:环境要求:尽管设备具备良好的动态适应性,但在粉尘严重、油污过多或水雾较重的场景中,光学成像可能会受到影响。建议确保测量环境清洁,并保证3D视觉相机的支架具有足够的刚性和稳定性。适用物体类型:该解决方案适用于物流输送线料框、转运托盘和大型货物等复杂形态物体,尤其适合需要高精度体积测量的工业物流仓储场景。 杭州星火博特3D视觉相机可提供经济高效的避障解决方案,适配城市道路的复杂环境,助力提升路口通行率。
传统园林修剪依赖人工登高作业,效率低且安全隐患大,绿篱造型修剪还存在标准化难、误差大的问题。sparkbot 3D TOF相机为枝叶修剪机器人提供重要感知支持,可选用DT950pro型号,其40米测距SPAD纯固态激光雷达与1080P视觉模块,实现枝叶轮廓准确扫描与三维建模,硬件级同步算法确保动态遮挡下定位误差<5cm,准确识别电力线、交通标识等障碍物。搭配多机械臂协同控制,可自动规划修剪路径,适配胸径≤30cm乔木,修剪精度达±2cm,1台设备可替代5名工人,效率提升400%,同时规避高空作业风险,助力市政绿化、景区运维实现“无人化”修剪。sparkbot的aura灵光系列产品,采用i tof测量学原理设计,可以提供标准化的硬件模块,也。长沙结构光3D相机定位
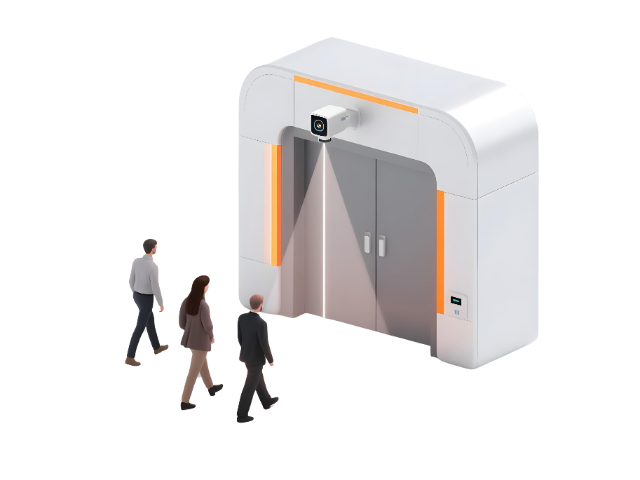
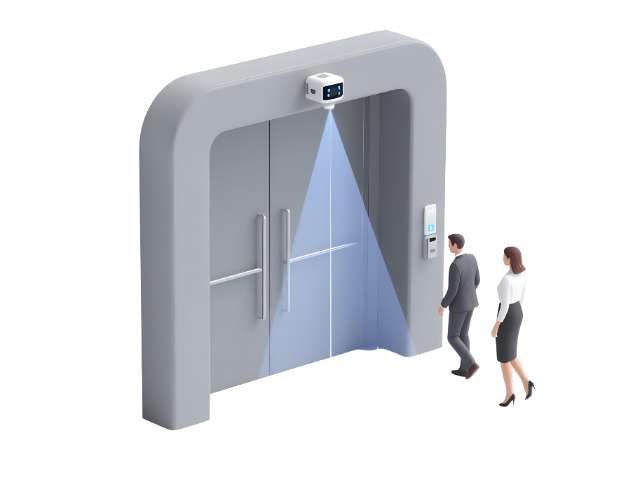
3D激光雷达和的3D tof 相机的应用不仅提高了地铁屏蔽门的防夹性能,还增强了整个地铁系统的安全。佛山AMR3D相机打印
3D激光雷达为机器提供了“感知世界的眼睛”。3D激光雷达的超宽视场角设计。这意味它不仅可能看清地面的草坪边界,更能捕捉到树梢、灌木丛等高空障碍物。高达 20万点/秒 的点云速率,能生成高密度实时 3D 地图,让机器人在大型公共绿地或复杂庭院中游刃有余。割草作业对边界控制要求极高。sparkbotd北极星系列3D激光雷达具备 ≤2cm 的测距精度,结合 NetRTK 校正后,全局定位误差可控制在 1cm 左右。这确保了机器人能够准确执行“Z”字形割草路径,避免漏割、重割或越界进入花坛。 面对单一传感器易受干扰的问题,3D激光雷达主导航结合视觉与 RTK 互补,实现了无死角准确定位,彻底解决传统机器人在树下或墙角容易迷失的问题。360° 高密度点云实时构建地形起伏,配合AWD 四轮驱动系统,让机器人轻松征服 陡坡与崎岖地形,越野性能强劲且不损伤草坪。面对草坪上散落的玩具、宠物或花园家具,sparkbotd北极星系列3D激光雷达高密度点云数据快速捕捉障碍物轮廓,结合 AI 视觉的物体分类能力,实现 “识别-判断-避障” 的全流程毫秒级响应,既保证了安全,又优化了路径效率。佛山AMR3D相机打印
杭州星火博特科技有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度。多年以来致力于发展富有创新价值理念的产品标准,在浙江省等地区的电子传感器领域中始终保持良好的商业口碑。成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力。杭州星火博特科技供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!
在杭州未来科技城一场无人机配送全流程测试顺利开展,而支撑此次测试实现准确导航、安全避障的重点,正是3D激光雷达。凭借其优异的感知性能,为低空物流场景的落地提供了关键技术支撑,也让参与测试的体验者感受到了科技赋能的魅力,此次测试不仅可是低空物流创新的一次实践,更成为3D激光雷达技术实力与应用价值的生动展示。作为低空配送场景顺利推进的重点支撑,3D激光雷达的融入,彻底解决了无人机在楼宇间飞行的导航、避障痛点,让全流程自动化、智能化配送成为可能。此次测试中,无人机之所以能在复杂楼宇环境中准确穿梭、平稳起降,重点得益于3D激光雷达提供的升维感知能力,其与相关定位、通信技术协同发力,构建了高效、安全的低...
- 成都双目3D相机识别 2026-06-14
- 杭州托盘3D相机雷达 2026-06-13
- 郑州割草机3D相机扫描 2026-06-13
- 双目3D相机识别 2026-06-13
- 青岛AMR3D相机导航 2026-06-12
- 沈阳叉车3D相机雷达 2026-06-12
- 青岛割草机3D相机识别 2026-06-12
- 合肥移动机器人3D相机 2026-06-11
- 广州移动机器人3D相机打印 2026-06-11
- 长沙移动机器人3D相机测量 2026-06-11

- 佛山割草机3D相机测绘 2026-06-07
- 杭州机器3D相机测绘 2026-06-07
- 沈阳工业3D相机建图 2026-06-06
- 合肥客流量3D相机测量 2026-06-06
- 天津库位3D相机检测 2026-06-05
- 重庆割草机3D相机导航 2026-06-04



- 杭州托盘3D相机雷达 06-13
- 杭州库位TOF相机避障 06-13
- 郑州割草机3D相机扫描 06-13
- 双目3D相机识别 06-13
- 合肥立体仓库3D激光雷达避障 06-13
- 青岛AMR3D相机导航 06-12
- 佛山割草机3D激光雷达 06-12
- 济南双目3D激光雷达扫描 06-12
- 沈阳叉车3D相机雷达 06-12
- 青岛割草机3D相机识别 06-12