从企业长期发展视角来看,全自动焊接机器人工作站不*是一项技术投入,更是一种制造能力的系统性升级。它促使企业从单一设备思维转向整体工艺和流程思维,在焊接这一关键制造环节建立标准、沉淀经验并形成体系。随着产品结构不断演进,这些沉淀下来的焊接工艺和系统架构可以持续复用,***降低新项目导入成本。同时,焊接...
全自动焊接机器人工作站基本参数
- 品牌
- ABB,发那科,库卡,新时达
- 型号
- IRB6710
- 电压
- 380
- 产地
- 广东佛山
- 厂家
- 广东利迅达机器人系统股份有限公司
全自动焊接机器人工作站企业商机
在全自动焊接机器人工作站的实际应用中,焊接工艺与系统集成能力起着决定性作用。不同材质、不同结构的工件对焊接方式、焊接电流、电压、送丝速度及焊枪姿态均提出了差异化要求,因此工作站在设计阶段需充分结合产品特点进行定制化配置。通过离线编程或示教编程方式,工程人员可以对焊接路径进行精细规划,确保焊缝成形均匀、熔深一致。与此同时,焊接机器人可配合双工位或多工位变位机,实现焊接与上下料同步进行,减少设备空转时间,提高整体节拍稳定性。随着焊接技术的发展,部分全自动焊接机器人工作站还集成了焊缝跟踪、熔池监测等辅助功能,使系统在面对工件尺寸波动或装夹误差时具备一定的自适应能力,从而进一步保障焊接质量的可重复性和可靠性。统一的电气与气路规范设计提升系统维护便捷性与可靠程度。肇庆通用全自动焊接机器人工作站

全自动焊接机器人工作站在连续生产环境下能够展现出较强的节拍稳定性。通过预先设定焊接顺序与动作节奏,系统可在长时间运行中保持一致的作业周期,避免因人工操作差异导致的时间波动。许多生产场景会采用双工位或循环工位结构,当一侧进行焊接作业时,另一侧同步完成工件装夹与准备工作,使机器人利用率得到提升。与此同时,焊接程序可根据不同型号产品进行调用与切换,减少换线准备时间。稳定的节拍管理不*有助于提升产线整体产能,也便于企业进行生产计划排程,使订单交付更加可控。惠州全自动焊接机器人工作站售后服务通过离线编程提前验证路径,有效缩短现场调试时间与试错成本。
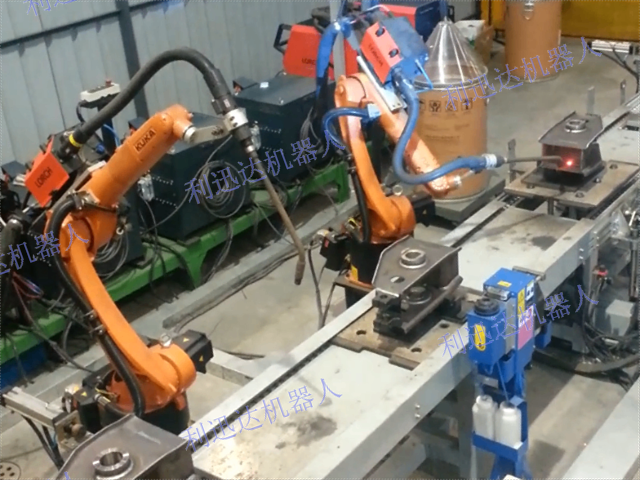
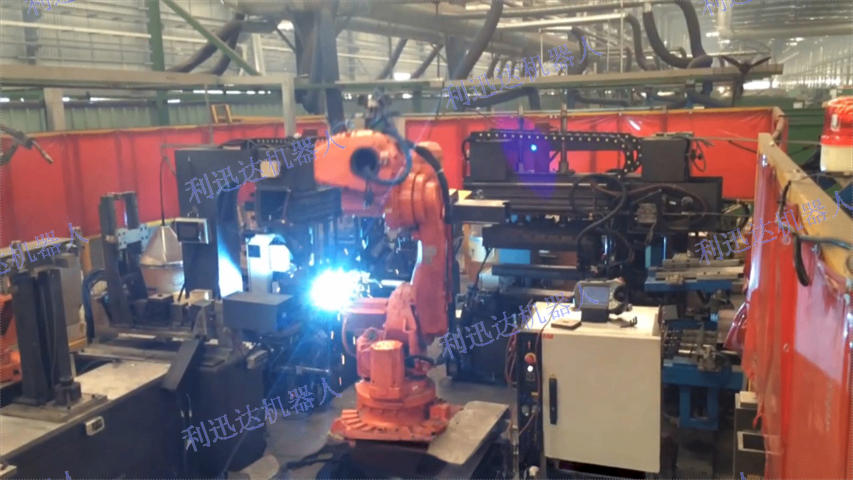
全自动焊接机器人工作站是现代制造业实现高质量、高稳定性焊接生产的重要装备形式之一。该工作站通常由工业机器人本体、焊接电源、焊枪系统、变位机、夹具系统、安全防护装置以及集中控制系统组成,通过程序控制实现工件自动定位、自动焊接与自动循环作业。相较于传统人工焊接方式,全自动焊接机器人工作站能够在复杂焊缝轨迹、高一致性焊接质量以及长时间连续作业方面表现出明显优势,特别适用于批量化、标准化程度较高的焊接场景。在生产过程中,机器人按照预设轨迹稳定运行,焊接参数保持恒定,能够有效降低因人为操作差异带来的焊缝不稳定问题。同时,工作站通过合理的工位布局与流程设计,使焊接、装夹、翻转等动作形成闭环,大幅提升单位时间内的焊接效率,为企业构建自动化焊接产线提供了可靠基础。
在**制造体系中,全自动焊接机器人工作站早已不再只是替代人工焊接的工具,而是承担着工艺稳定、质量一致和生产节奏控制的重要职能。其**价值体现在对焊接全过程的系统化管理能力上,包括焊接姿态控制、热输入分配、节拍节律以及工序衔接等多个层面。通过对焊接路径的精细规划,机器人能够在复杂结构件上实现连续、平稳的焊接动作,使焊缝成形更加均匀可靠。同时,工作站在设计阶段即融入工艺思维,通过夹具基准统一、焊接顺序优化以及变位协同控制,很大程度降低焊接变形对产品尺寸精度的影响。这种将“设备能力”与“工艺逻辑”深度融合的方式,使焊接过程从经验驱动逐步转向数据与标准驱动,为企业构建可复制、可扩展的焊接体系奠定坚实基础。规范化布线与标识提升检修效率,降低长期运维的复杂程度。

在夹具与定位系统设计方面,全自动焊接机器人工作站强调重复定位精度与装夹便捷性的平衡。合理的定位基准能够确保每次上件后工件位置保持一致,从而使机器人轨迹与实际焊缝位置高度匹配。夹具结构通常兼顾刚性与操作空间,既要在焊接过程中提供稳定支撑,又要便于快速装卸,减少辅助时间。对于尺寸公差较大的来料,还可通过可调定位机构进行微调,以降低焊接偏差风险。稳定可靠的夹具系统不*影响焊缝成形质量,也直接关系到整体生产节拍与现场操作顺畅度,因此在工作站设计中占据重要地位。预防性维护策略基于运行数据,减少突发停机带来的交付风险。惠州全自动焊接机器人工作站售后服务
远程诊断功能帮助技术团队及时定位问题并制定维护计划。肇庆通用全自动焊接机器人工作站
全自动焊接机器人工作站在实际生产中的价值,不*体现在焊接动作本身的自动化,更体现在其对整体生产流程稳定性的支撑作用。通过将焊接工序集中在标准化工作站内,企业可以对焊接节拍、工艺参数以及设备状态进行统一管理,使焊接过程更加可控。在焊接运行过程中,机器人严格按照预设程序执行动作,焊枪运行轨迹连续且平稳,避免了人工焊接中常见的停顿、偏移或重复修正问题。对于需要长时间连续生产的焊接场景,这种稳定输出能力尤为关键。同时,工作站可根据产品结构对焊接顺序进行优化,使焊接过程由内到外、由主焊缝到辅焊缝有序展开,从而减少焊接变形和应力集中现象。通过系统化规划焊接流程,工作站不*提升了焊接效率,也为后续装配和检测工序创造了更加稳定的基础条件。肇庆通用全自动焊接机器人工作站
广东利迅达机器人系统股份有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在广东省等地区的机械及行业设备行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**广东利迅达机器人系统股份供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!
与全自动焊接机器人工作站相关的文章

清远通用全自动焊接机器人工作站维保
- 防城港定做全自动焊接机器人工作站维保 2026-06-15
- 防城港全自动焊接机器人工作站售后服务 2026-06-14
- 肇庆通用全自动焊接机器人工作站 2026-06-13
- 南宁直销全自动焊接机器人工作站设备价钱 2026-06-13
- 桂林一体化全自动焊接机器人工作站维修 2026-06-11
- 中山全自动焊接机器人工作站保养 2026-06-09
- 江门工业全自动焊接机器人工作站系列 2026-06-07
- 茂名直销全自动焊接机器人工作站系列 2026-06-07
- 中山工业全自动焊接机器人工作站供应商 2026-06-07
- 柳州通用全自动焊接机器人工作站保养 2026-06-06
- 工业全自动焊接机器人工作站生产厂家 2026-06-04
- 深圳一体化全自动焊接机器人工作站耗材 2026-06-02
与全自动焊接机器人工作站相关的产品

与全自动焊接机器人工作站相关的新闻
-
天津定做全自动焊接机器人工作站系列 2026-05-30 06:15:29在全自动焊接机器人工作站的运行过程中,焊接节拍的稳定性直接影响整体生产效率。通过合理规划工艺流程,工作站可以实现装夹、焊接、翻转、检测等工序的有序衔接,减少不必要的等待时间。许多焊接工作站采用双工位或循环工位设计,当一侧进行焊接作业时,另一侧同步完成上下料操作,使机器人始终处于高利用率状态。同时,焊...
-
广州一体化全自动焊接机器人工作站 2026-05-28 00:20:14在面向复杂结构件的应用场景中,全自动焊接机器人工作站通过多轴协同与变位联动,构建出更为宽广且稳定的有效焊接空间。机器人本体的运动能力与变位装置的姿态调整相互配合,使关键焊缝能够尽量处于有利位置,从而改善熔池稳定性与成形均匀度。为了避免姿态切换过程中产生轨迹偏移,控制系统会对机器人与变位机的同步关系进...
-
辽宁直销全自动焊接机器人工作站售后服务 2026-05-26 10:07:40全自动焊接机器人工作站在推广应用过程中,还能够帮助企业逐步建立标准化的焊接作业规范。通过统一程序命名、参数编号以及工艺文件管理方式,不同班组在使用设备时可遵循同一套操作逻辑,减少因习惯差异带来的偏差。标准化文件还便于培训新员工,使其在较短时间内掌握设备基本操作与注意事项。随着标准持续完善,焊接作业将...
-
广东全自动焊接机器人工作站系列 2026-05-26 07:07:59在车间环境管理方面,全自动焊接机器人工作站通常配套完善的安全与防护设计。工作区域会设置围栏、防护门或安全光栅,对焊接弧光、高温飞溅以及烟尘进行有效隔离,减少对周边工位的影响。控制系统具备报警提示与紧急停止功能,一旦检测到异常状态,可及时中断设备运行,保障现场作业安全。与此同时,规范的防护结构也有助于...
与全自动焊接机器人工作站相关的问题
与全自动焊接机器人工作站相关的标签
新闻资讯
产品推荐
-
防城港定做智能刀具打磨机器人系统维修
2026-06-14 -
肇庆通用全自动焊接机器人工作站
2026-06-13 -

深圳一体化智能刀具打磨机器人系统设备价钱
2026-06-13 -

南宁直销全自动焊接机器人工作站设备价钱
2026-06-13 -
钦州工业全自动搬运与上下料机器人工作站产品介绍
2026-06-11 -

河北直销全自动打磨机器人工作站设备价钱
2026-06-11 -
桂林一体化全自动焊接机器人工作站维修
2026-06-11 -
中山全自动焊接机器人工作站保养
2026-06-09 -

防城港定做全自动打磨机器人工作站供应商
2026-06-09