- 品牌
- 博崴特
- 型号
- 智能防撞预警产品系列
- 类型
- 智能防撞预警产品系列
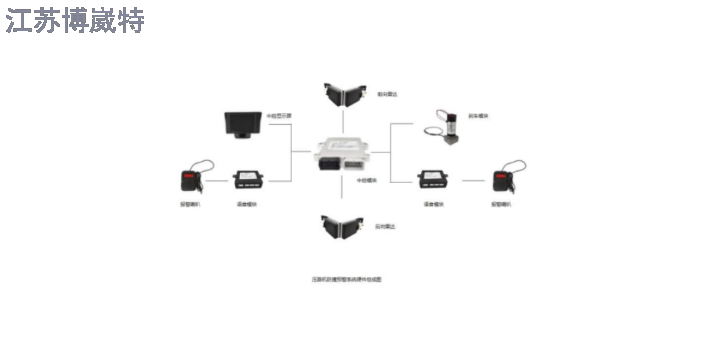
汽车防撞预警系统主要是用于协助驾驶员避免高、低速追尾,行驶时无意识偏离车道,与行人碰撞等重大交通事故。它就像眼睛一样帮助驾驶员,持续不断的监测车辆前方道路状况,系统可以识别判断各种潜在的危险情况,并通过不同的声音和视觉提醒,以帮助驾驶员避免或减缓碰撞事故。汽车智能防撞系统大致的意思为:当汽车与汽车之间的间距小于设定的安全距离时,该系统能自动报警,并采取制动措施。汽车防撞预警系统是基于智能视频分析处理的汽车防撞预警系统,通过动态视频摄像技术、计算机图像处理技术来实现其预警功能。主要功能为:车距监测及追尾预警、前方碰撞预警、车道偏离预警、导航功能、黑匣子功能。相对于国内外现有的汽车防撞预警系统,如超声波防撞预警系统、雷达防撞预警系统、激光防撞预警系统、红外线防撞预警系统等,功能、稳定性、准确性、人性化、价格上都具有无可比拟的优势。可全天候、长时间稳定运行,极大提高了汽车驾驶的舒适性和安全性。目前市场上可以测定汽车之间安全距离的渠道有三种:超声波测距、微波雷达测距以及激光测距。新疆智能防撞防闯入主动预警系统——江苏博崴特电子科技有限责任公司。大兴安岭道路施工防撞系统

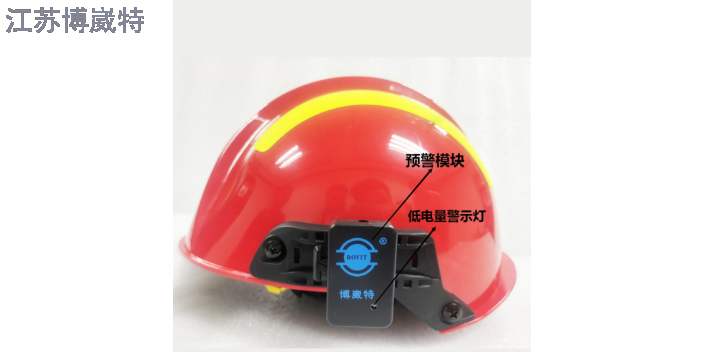
基础架构层智能网联道路基础架构层是一个由多个关键组件构成的基础架构,用于存储、处理和管理大规模数据。包括分布式文件系统、分布式计算框架、数据管理与存储系统、关系型数据库和NoSQL数据库、数据仓库系统、数据集成与ETL工具。这些组件协同工作,包括批处理、实时流处理和机器学习,支持智能网联道路多种应用场景,本文介绍的车辆运行轨迹还原系统是其中的一类应用场景。智能网联道路基础架构层还包括高精度地图和高精度定位两个重要的基础服务能力。高精度地图的地理信息数据和车道级别信息是进行多目标分类检测与追踪的基础。高精度定位服务通过融合卫星定位、惯性导航和视觉传感器等多源数据,实现对交通参与者的高度准确和实时追踪,支持车辆轨迹追踪与还原的可靠性和精细性。潮州交通安全防撞系统智能防闯入预警设备,主要由道路交通安全智能预警主机、智能磁吸式预警副机及手环式预警副机组成。

车载式智能防撞主动预警系统由智能预警主机和预警副机组成,主机既可单独的使用,也可与副机配套使用。系统可实时准确检测并跟踪作业车辆所在车道上游300m范围的车辆,当有车辆进入作业车辆所在车道上游200m范围且速度大于60km/h或压线、S型行驶等可能威胁作业车辆安全时,主机即实时向上述车辆发出有效定向声波预警,及时提醒上游车辆司机注意安全、变道行驶。当车辆未变道并进入作业车辆上游所在车道50米范围且相对速度≧35Km/h时,主机即向上游车辆发出更强定向声波预警,同时向作业现场发出预警信号,启动副机(磁吸式预警副机、手环式预警副机)提醒作业人员及时避让。
智能网联道路感知数据具有多样的特征,这些特征有助于实现对交通环境的全方面感知和理解。通过整合来自不同传感器和通信模式的数据,实现多模态融合,以提高对复杂交通环境的理解和感知精度。主要特征包括实时性、多源性、高精度、位置信息、目标识别与分类、环境参数。除此之外感知数据具有安全性和隐私保护特征,确保感知数据传输和存储的安全,防范潜在的网络攻击和数据泄露。智能网联道路的道路基础设施层主要由路侧感知设备、交通信号灯、网络通信设施和高精定位设备等软硬件基础设施构成。其中,路侧感知设备包括高清摄像头、激光雷达、毫米波雷达、气象传感器等。智能雷达防撞(防闯入)预警技术是把自己“武装”起来,不让本车道的危险物靠近自己。
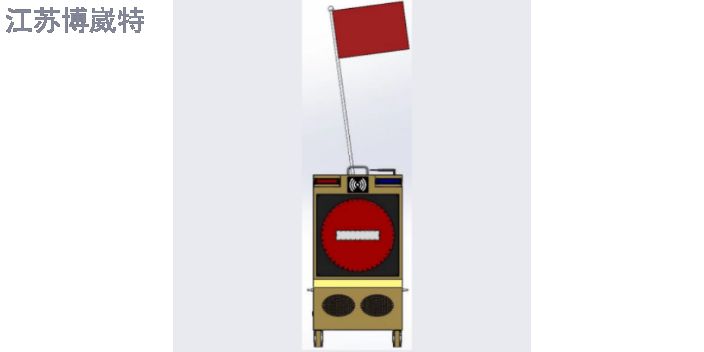
雾宁宝由雷达监测和预警终端两部分组成,分为固定式和车载式两种类型,具有实时监测、准确预报、主动预警、引导车辆、防止追尾等五大功能。固定式雾宁宝能通过雷达监测和计算机算法分析,实时监测安装位置八公里围内的团雾,上传团雾信息与渐变云图。布设于团雾多发路段上下游的预警终端,主动预警上游车辆、引导车辆驶离高速,具备有雾、有车时预警,无雾、有车时提醒等交通诱导功能。车载式“雾宁宝”能有效监测车辆前方团雾和前、后向的危险车辆,预防车辆闯入团雾区、防止发生追尾事故,为事故处置、养排作业、安全巡查等作业车辆增添了新型“智能安全防护墙”。南京智能防撞防闯入主动预警系统——江苏博崴特电子科技有限责任公司。抚州工程机械车辆防撞系统
淮安智能防撞防闯入主动预警系统——江苏博崴特电子科技有限责任公司。大兴安岭道路施工防撞系统
平安护航所研发生产的汽车智能防撞控制系统,采用了激光超声技术,能够更准确的测量汽车与其他车辆或者行人之间的距离,通过车载语音系统,帮助驾驶员做好驾驶工作,同时这套系统不会因为光线强度、雨雪天气而产生影响,检测更安全可靠。为了能够为所有的汽车驾驶人员提供安全保障,平安护航研发生产的汽车智能防撞控制系统,能够与市场上所有汽车适配,并且在不改变汽车原有结构的情况下,进行完美安装。同时这套系统体积非常小,安装完成并不影响汽车美观,对汽车外在形象也没有任何影响。大兴安岭道路施工防撞系统
- 长治智能防撞系统 2024-11-14
- 伊春养排作业防撞系统 2024-11-14
- 秦皇岛智能防撞系统 2024-11-14
- 南京养排作业防撞系统 2024-11-13
- 郑州智能防撞系统 2024-11-13
- 甘孜装载车防撞系统 2024-11-13
- 莆田特种车辆防撞系统 2024-11-12
- 杭州道路施工防撞系统 2024-11-12
- 黑河工程机械车辆防撞系统 2024-11-12
- 衡水汽车防撞系统 2024-11-11
- 达州装载车防撞系统 2024-11-11
- 南平道路施工防撞系统 2024-11-11