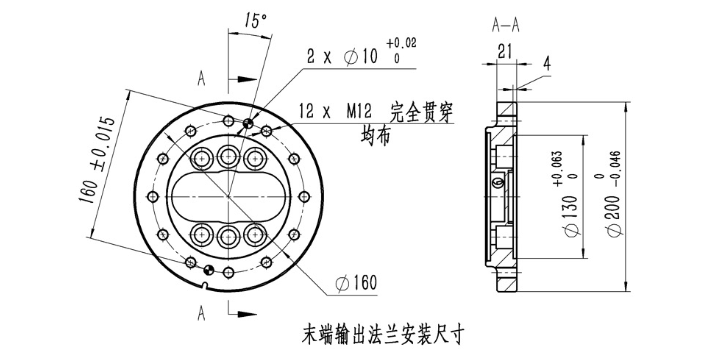
现在制约机器人普及的因素不**是价格和技术,很多国内的生产车间太狭窄、太拥挤,并不适合生产线的布局安装。如果要完全实现自动化,企业除了支付购置机器人的高昂资金,还需要对厂房进行改造甚至重建,这在无形中提高了“机器换人”的门槛。针对这一情况,华数机器人研发了HSR-BR6双旋机器人。事实上,华数机器人的集成商客户联合终端用户提出,需要一种价格较低、能够高速运作、体积轻巧,并且能适应生产车间中钻工中心的狭小空间作业的六轴机器人,对机器人的运动范围也提出要求。超高精度:除了精密的设计外,采用高精密减速机和电机,末端重复定位精度高达±0.02mm。江苏6轴机器人自动打螺丝
基于华数HSR-650L和JR680机器人在市场的良好反馈,华数机器人推出全新通用型大负载机器人HSR-JR6150,该款机器人提供了更大的作业空间,搬运负载能力达到150kg,工作范围达2700mm,可更大范围抓取物件。其高速稳定的节拍和出色精度可以满足家电、汽摩、五金、建材等诸多行业的自动化需求。华数HSR-BR5110是一款占地面积小、节拍和性价比非常高的双旋机器人,尤其适用于对腕关节自由度有需求的高效搬运码垛作业。其独有双旋结构(外旋、内旋),打破传统工业机器人构型,可以在场地空间有限的多个设备工位间实现大幅度连线或搬运。作为国产机器人,HSR-BR5110其关节速度已达到KUKA现有同类产品速度,具有很高的市场竞争力。天津6轴机器人销量高性价比:低成本购置,可重复编程用于其他搬运、装配作业,一年可收回成本。
如今,3C行业仍然是机器人企业聚焦的重点领域,尤其是电子产品制造重地的华南地区,众多工业机器人本体厂商都在积极布局。总体来说,3C电子行业面临着多重压力,首先,人员工资上涨,其次90后员工的管理难度大,且流通性较大,再次,厂房租赁、材料等价格上涨,自动化设备越用要求越高,设备成本上涨。鉴于种种挑战,3C电子行业对机械手臂的自动化需求不断提高;同时,3C电子行业由于产品变化快,制造周期缩短,不利于标准件的批量化生产,因此市场推广存在阻力。目前,已经在3C电子行业应用的工业机器人主要有6轴多关节机器人(3-10KG)、4轴水平多关节机器人(3-10KG)、直线模组非标组合坐标机械手(3-50KG)等,像这类机器人大多用于装配、分拣、码垛等。
HSR-JR650L工业机器人:HSR-JR650参数对标国内外同类型机器人,在参数性能上达到先进水平,同时在设计中充分考虑搬运、焊接、机加的工艺要求,适合较为严苛的工况环境,能对诸多应用场合提供有力支持。HSR-JR650L,中型负载机器人,中型负载应用于码垛、焊接、搬运的市场优势尤为明显,有助于增强企业智能化程度,加强企业生产安全性。HSR-JR650L机器人拥有50kg的负载能力,臂展为2400mm,合理设计工装夹具后,机器人可实现重复定位精度不大于0.08mm的重复性工作,可以广适用于搬运、切割、打磨抛光、码垛等行业。工业机器人的重复定位精度是指工业机器人末端执行器为重复到达同一目标位置与实际到达位置之间的接近程度。
HSR-JR6150工业机器人:一、产品简介:HSR-JR6150是一款大负载工业机器人,荷重150kg。采用自主研发的第三代控制系统,具有负载大、工作范围广、可靠性高、稳定性强、运动响应快、性价比高等优势。可广泛应用于机床上下料、物料搬运、焊接等多种场合。2、产品优势:1:优异的稳定性:严格的零部件把控,每一步装配环节的追求。性能更稳定、可靠性更高。同时,简易的设计让维护更简单。2:抓取范围更宽广:更简单、更强大,150kg负载机器人工作范围高达2.7m,更大范围的抓取物件,即站得近,抓得远。3:控制技术:采用第三代控制系统,运动控制使机器人运行更平稳,响应更快速。4:质量服务、高效售后:可提供远程访问监视实时查看机器人运行状态,让故障解决于无形;专业的焊接团队提供专业的焊接技术支持,提供全天24小时的质量服务。实际应用中,机器人焊接因为材料、设计、工艺等因素,以及焊接性能要求的多种多样,导致效果达不到预期。深圳6轴机器人五金冲压
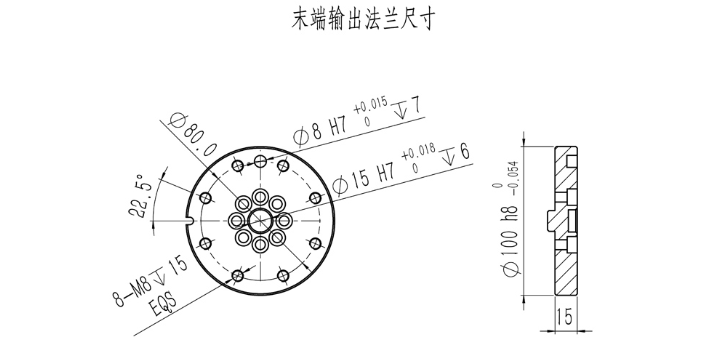
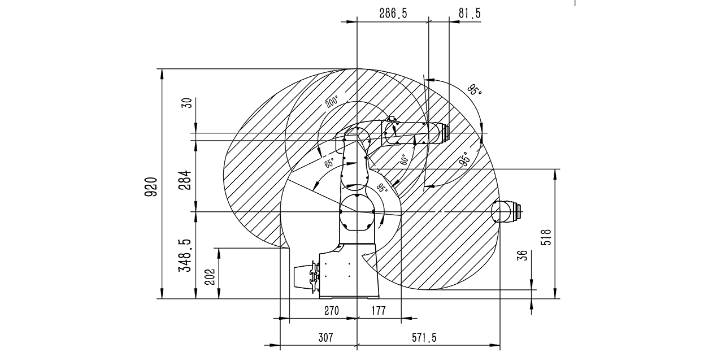
定位为3C行业高速、高精、高防护装配型机器人,有效负载7kg,半径可达910mm,重复定位精度±0.02mm。江苏6轴机器人自动打螺丝
六轴机器人的运动能力基于其独特的运动学设计。它通过六个旋转关节来实现灵活运动,每个关节都对应一个特定的自由度,这六个自由度相互配合,赋予了机器人在三维空间中近乎无限的运动可能。从机械结构角度看,基座关节提供了机器人的旋转基础,使得机器人能够在水平面上大范围转动,如同人的腰部转动,拓展了作业的覆盖区域。而肩部关节和肘部关节的协作,类似于人类手臂的屈伸动作,控制着机器人手臂在垂直平面内的上下移动,能够精细调整工作端到达不同高度位置。腕部的三个关节则负责更为精细的动作,如旋转、摆动等,让机器人能够灵活调整末端执行器的姿态,无论是进行精密装配,还是复杂的焊接操作,都能轻松应对。这种多关节协同的运动学设计,为六轴机器人在工业生产和其他领域的广泛应用奠定了坚实基础。江苏6轴机器人自动打螺丝