进一步地,所述蜗轮蜗杆机构包括一横向蜗杆、一蜗轮以及一位移调节把手;所述横向蜗杆的一端与所述激光红外线接收挡板的背面固接,另一端与所述电子测量仪抵接;所述位移调节把手与所述蜗轮的中心固接。进一步地,所述电子测量仪包括一电子千分表以及一千分表夹持装置;所述电子千分表夹持在所述千分表夹持装置上,所述千分表夹持装置一端抵接于所述延伸部,另一端抵接于所述横向蜗杆上。 进一步地,所述传感器夹持装置包括一纵向螺杆以及一夹持器;所述夹持器套设在所述纵向螺杆上,所述激光位移传感器夹持在所述夹持器上。
优点在于:1、通过所述电子千分表,使得所述激光位移传感器的检验精度极大提高。2、通过所述电动伸缩双直线导轨,简化了检验流程、当设备闲置时收缩导轨可节约占地面积。 高精度激光位移传感器具有较高的灵敏度,能够检测微小的位移变化。防水激光位移传感器品牌企业

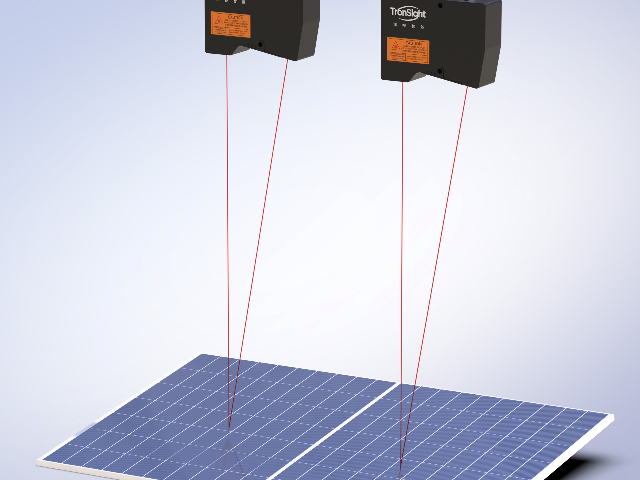
所述可伸缩导轨1包括一电动伸缩双直线导轨11、一No.1支撑件15、一第二支撑件16、一滑动轮12、一伸缩制动开关13以及一控制面板14;所述电动伸缩双直线导轨11包括一伺服电机(未图示)、一双直线导轨111以及一丝杆(未图示),所述丝杆设于所述双直线导轨111内部,所述丝杆与所述双直线导轨111动联接,所述伺服电机设于所述双直线导轨111的末端且与所述丝杆连接,所述伺服电机通过所述丝杆联动所述双直线导轨111进行伸缩;所述No.1支撑件15安装在所述电动伸缩双直线导轨11固定端的底部,所述第二支撑件16安装在所述电动伸缩双直线导轨11可伸缩端的底部;所述滑动轮12设于所述第二支撑件16的底部,所述电动伸缩双直线导轨11可通过所述滑动轮12进行伸缩;所述伸缩制动开关13设于所述第二支撑件16的侧面,用于伸缩制动的开启与关闭;所述控制面板14与所述电动伸缩双直线导轨11电连接,所述控制面板14用于控制所述电动伸缩双直线导轨11的伸缩距离。苏州激光位移传感器经销批发它可以用于测量机械零件的位移,以确保其精确性和稳定性。

在图1所示的实施例中,成像物镜6包含以下两种结构形式:(形式一)成像物镜6为物侧面和像侧面都为非球面的单一非球面镜片,(形式二)成像物镜6是由多个镜片组合而成的透镜组。综上所述,本发明在激光位移传感器的光学系统设计时,利用增加像散,在感光元件的感光单元沿着S方向排列的情况下,拉高成像物镜S方向的MTF值同时降低T方向上的MTF值,使得线阵感光元件上的光斑呈现长条状态,进而实现以下技术效果:降低激光位移传感器中成像物镜的设计难度,同时降低了设备的成本;
进一步地,所述可伸缩导轨包括一电动伸缩双直线导轨、一No.1支撑件、一第二支撑件、一滑动轮、一伸缩制动开关以及一控制面板;所述No.1支撑件安装在所述电动伸缩双直线导轨固定端的底部,所述第二支撑件安装在所述电动伸缩双直线导轨可伸缩端的底部;所述滑动轮设于所述第二支撑件的底部;所述伸缩制动开关设于所述第二支撑件的侧面;所述控制面板与所述电动伸缩双直线导轨电连接。进一步地,所述微调装置包括一蜗轮蜗杆机构、一电子测量仪以及一微调平台;所述微调平台设于所述电动伸缩双直线导轨上端的尾部,所述微调平台的末端向上设有一延伸部;所述蜗轮蜗杆机构设于所述微调平台的前端;所述电子测量仪的一端抵接于所述延伸部,另一端抵接于所述蜗轮蜗杆机构。它具有较长的使用寿命,能够长时间稳定地运行。
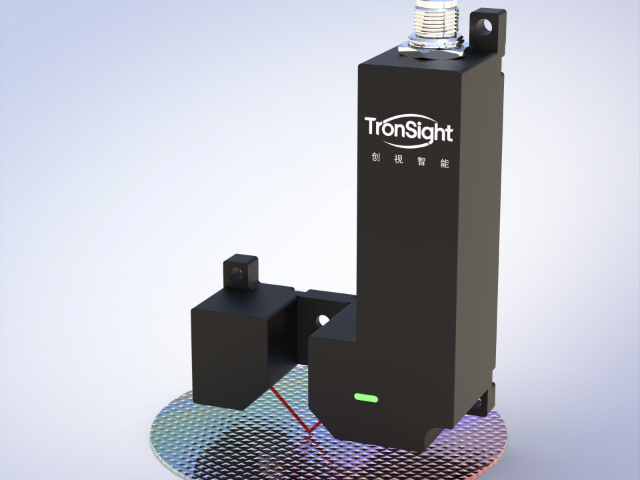
根据物体表面的散射特性,可确定入射光与成像透镜光轴的夹角。激光入射到被测物体表面,散射光强度成椭球型分布[6]。当入射光垂直入射时,α值越小,成像透镜接收到的散射光强度越大,但角度过小对探测器分辨率要求及制作工艺上都有较高难度,综合考虑取α值为21.8°,由仪器的测量范围±10mm可得到物距为53.85mm。通常情况下,库克三元组有很好的成像效果[7],因此选择库克三元组作为成像透镜的初始结构进行优化。优化过程中以各个镜片表面的半径为变量,控制厚度在适当范围,同时将像面与光轴的夹角β设为可变,采用CODEV的横向像差与波像差相结合的方式进行优化,得到下面的结果。图3为优化后的成像光学系统激光位移传感器在3C电子行业中的应用案例。宁波激光位移传感器推荐
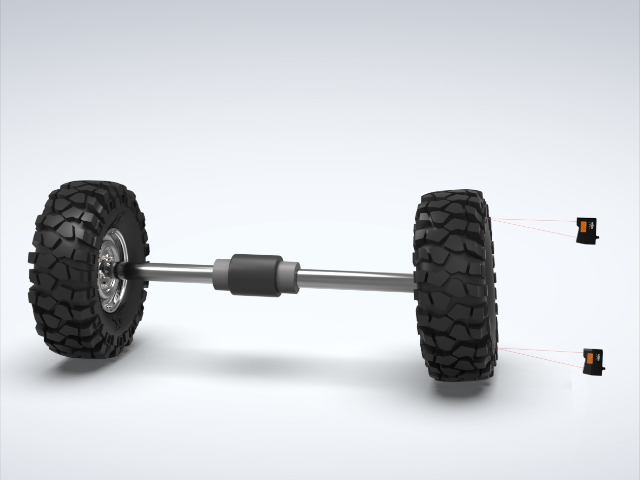
这对于需要实时控制和调整的应用非常重要,如机械加工、自动化生产线等领域。防水激光位移传感器品牌企业
激光位移传感器的测量精度容易受到被测物体表面特征的影响,为了减小测量误差,在整形镜设计中应尽量使出射光斑在有效的测量范围内实现光斑小且均匀。针对传感头小型化设计的要求,半导体激光器体积小、重量轻的优点正好符合这一要求,但其光束质量并不理想,需要对其进行光束整形。半导体激光器快慢轴的光束分布极不对称:快轴发散角较大,半角的典型值为30~40°,光束呈高斯分布,发光范围的半宽度为0.6~0.8μm,慢轴发散角的半角典型值为3~6°,光束分布不规则,发光范围半宽度为50~100μm。因此,在不允许能量损失的情况下,要求整形系统的物方数值孔径(NA)>0.573;但由于光束的快轴能量呈高斯分布,通常取半宽度(FWHM)为20°,此时NA=0.342。系统物距应尽量小一些,但考虑到工艺问题,不宜过小,选定为2.5mm。为了便于设计,将系统倒置,整个系统的主要要求为:工作波长为785±10nm,像方NA=0.342,像距l′=2.5mm,物距l=40~60mm,焦距f=3~4mm。防水激光位移传感器品牌企业