- 品牌
- 云乐智能车,杭州云乐,安徽云乐
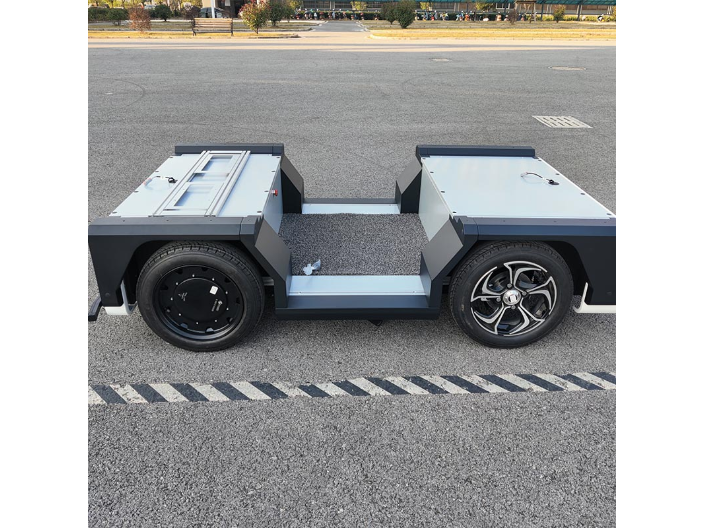
- 型号
- 小鱼1200
- 尺寸
- 1350*590*310mm
- 重量
- 70kg
- 产地
- 安徽宣城
- 可售卖地
- 全国
- 是否定制
- 否
- 材质
- 铝合金
- 配送方式
- 托运
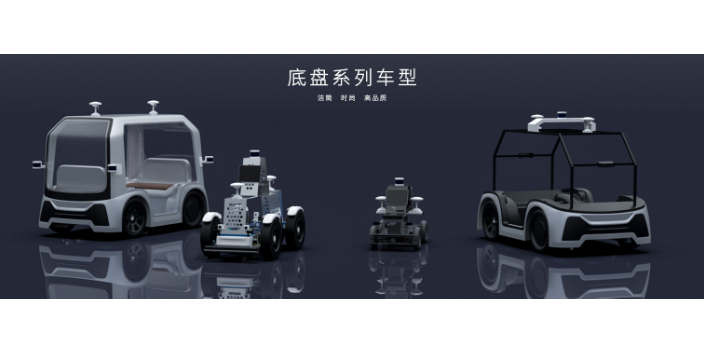
- 小鱼500
- 490*490*400mm
- 小鱼1200
- 1350*590*310mm
- 小马底盘
- 2150*1280*540mm
- 驱动形式1
- 小鱼500差速底盘
- 驱动形式2
- 其他后驱前转(阿克曼)、四驱前转
线控底盘需要多领域的技术支持,以实现其自主性、安全性和高效性。首先,自动驾驶技术是关键,包括传感器技术、机器学习算法和实时决策系统,以使底盘能够感知环境、规划路径和避障。其次,通信技术是必不可少的,以实现远程遥控和数据传输,包括高速互联网连接和低延迟通信协议。第三,传感器技术涵盖激光雷达、摄像头、GPS等多种传感器,用于收集底盘周围环境的数据。此外,实时数据处理能力、高性能计算硬件和安全网络技术对于处理和传输数据至关重要。还有电池技术和能源管理系统,用于提供底盘所需的电力,并优化续航能力。人机交互界面需要直观、易用,以确保操作员可以有效地控制底盘。机械设计和材料科学影响底盘的结构和可靠性,包括轮胎、悬挂系统和底盘结构等。数据存储和处理技术用于管理和分析生成的大量数据,确保有效的数据利用。这些技术支持共同构成了线控底盘的基础,使其能够在战事、工业、科学研究和其他领域中发挥重要作用。随着技术不断发展,线控底盘的性能和应用领域也将不断扩展。无人驾驶技术和线控底盘有什么关联?杭州四轮驱动四轮转向线控底盘原理
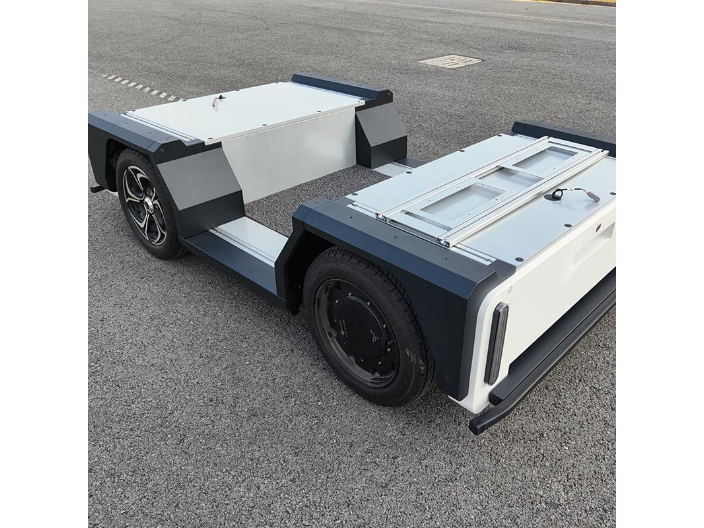
线控底盘
线控底盘是一种特殊类型的底盘,通常用于遥控车辆,它包括车辆的底部结构和底盘组件,但不包括驾驶室、发动机或人员驾驶控制设备。线控底盘通常用于工业应用,如无人驾驶车辆、遥控机器人或其他需要遥控操作的设备。用户可以通过远程控制设备,如遥控器或计算机,来操控线控底盘的运动、方向和速度,实现遥控操作,从而用于危险环境、远程勘测或需要高度精确性和可控性的任务。线控底盘的设计通常考虑到稳定性、悬挂系统、传动系统和操控性能,以确保能够适应各种操作需求。杭州原地转向线控底盘厂家直销云乐智能车3个系列6大规格尺寸线控底盘。
线控底盘的动力系统通常通过电动机或液压系统提供动力。对于电动机驱动的线控底盘,电能通常来自电池或电源,通过电线或电缆传输到电动机,电动机则将电能转化为机械能,推动车轮或履带以实现移动。电动机的控制通常由嵌入式计算机或控制单元完成,接收遥控信号或预编程的指令,然后调整电动机的功率和方向以控制底盘的速度和方向。液压驱动的线控底盘使用液压泵和液压缸,将液压流体通过管道传送到液压缸,从而产生力量推动底盘运动。同样,液压系统的控制也由计算机或控制单元实现,以调整液压流量和压力,从而控制底盘的动作。不论是电动机还是液压系统,动力系统的设计和控制对于线控底盘的性能和操作具有重要影响,通常需要考虑能源效率、精度和可靠性等因素。
线控技术对汽车行业发展产生了多方面的影响:自动驾驶和远程操作:线控技术为自动驾驶汽车提供了支持,使车辆能够在无人驾驶模式下操作。这有助于提高交通效率、减少交通事故,并改善交通流量管理。此外,线控技术也支持远程操作,使汽车能够在远程地点进行控制,例如远程停车或远程驾驶。汽车制造和装配:在汽车制造和装配过程中,线控技术用于自动化生产线上的机器人和设备控制,提高了制造效率和质量控制。这有助于加快汽车制造速度,并减少人为错误。汽车安全和驾驶辅助系统:线控技术在汽车中用于激光雷达、摄像头和传感器等传感器的控制,支持高级驾驶辅助系统(ADAS)。这些系统包括自动制动、自动驾驶巡航、车道保持辅助等功能,提高了驾驶安全性。线控底盘与原有底盘的区别。

线控技术广泛应用于多个领域,其主要范围包括:建筑和施工:在建筑和施工行业,线控技术用于操作重型机械、起重机和挖掘机,以完成各种任务,如土方工程和建筑施工。探险和勘察:探险家和研究人员使用线控技术探索偏远地区,如北极、沙漠或丛林,以研究自然环境、野生动植物和考古遗址。应急响应:在自然灾害或紧急情况下,线控技术可用于搜索和救援任务,进入危险区域执行救援工作,如地震后的探测和救助。交通和运输:一些交通工具,如遥控飞行器或水下探测器,使用线控技术进行监控和操作,用于监测交通流量、巡逻和运输。娱乐和游戏:遥控玩具、模型飞机、遥控船只等是线控技术在娱乐领域的应用示例,提供了远程控制和娱乐体验。云乐智能车专业生产线控底盘、无人小车企业。湖南原地转向线控底盘前景
轮式线控底盘和履带式线控底盘的区别在哪里?杭州四轮驱动四轮转向线控底盘原理
自动驾驶是线控底盘的充分条件,智能化、大数据网联化给线控底盘发展带来新的契机。其一,智能汽车需要大量的、精确的底盘系统信号。而种类繁多的底盘传感器,信号模式和处理方法各异,且大量传感器信号汇入控制器对信号实时处理提出更高要求,因此亟需研究新型底盘域控制器,对多源传感器信号实时处理、校验与解算理论。其二,智能汽车直接前馈预瞄控制需要精确的车辆模型,逼近真实车辆动力学状态。而底盘车辆及轮胎动力学呈现复杂非线性特性,因此亟需深入研究车辆复杂动力学模型精确解算机制,促进智能汽车的动力学应用发展。其三,智能汽车在复杂场景下需要精度的感知状态,保证类驾驶员视角。因此亟需研究复杂交通场景下底盘动力学域控制对车辆动力学状态的精确感知与预瞄技术,探索车辆运行动力学稳定边界精确量化机制,消除高复杂、动态交通环境的不确定性。杭州四轮驱动四轮转向线控底盘原理

- 江西智能巡逻线控底盘解决方案 2024-12-04
- 四川线控底盘前景 2024-12-04
- 广东便捷式线控底盘厂家直销 2024-12-04
- 武汉自动驾驶线控底盘哪家便宜 2024-12-04
- 安徽安保巡逻线控底盘方案设计 2024-12-03
- 天津阿克曼线控底盘厂家直销 2024-12-03
- 苏州麦克纳姆轮线控底盘解决方案 2024-12-03
- 嘉兴阿克曼线控底盘前景 2024-12-03