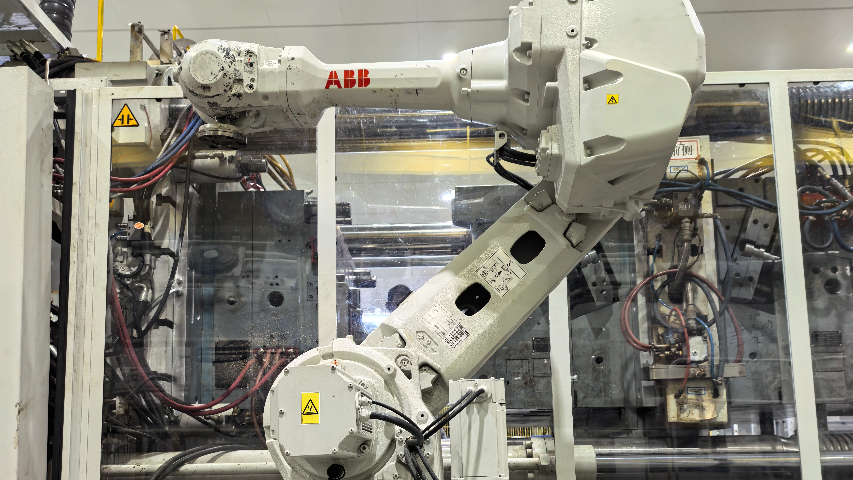
机器人型号:4600配合康耐视3D视觉对小车内的产品进行有序抓取放置到输送线上。工作原理视觉识别:康耐视3D视觉系统首先对小车内的印钞产品进行扫描,获取产品的三维图像数据。然后通过图像处理算法,对图像进行分析和处理,识别出产品的位置、形状、姿态等信息,并将这些信息传输给机器人控制器。路径规划:机器人控制器根据视觉系统提供的产品信息,结合机器人的当前位置和姿态,规划出便捷的抓取路径和动作序列。在规划路径时,会考虑机器人的运动学和动力学约束,以及避免与周围环境和设备发生碰撞等因素。抓取操作:机器人按照规划好的路径和动作序列,运动到产品上方,通过末端执行器(如夹具)对产品进行抓取。在抓取过程中,机器人会根据视觉系统实时反馈的产品位置信息,对抓取动作进行微调,确保抓取的准确性和稳定性。放置输送:机器人抓取产品后,按照预设的路径将产品放置到输送线上。输送线将产品输送到下一个生产环节,完成整个拆垛和输送过程。发那科机器人电缆更换,杜绝信号干扰问题,有问题找浙江展杭,延长设备使用寿命。福州ABB660机器人保养
ABBIRB2600四轴机器人凭借其高速稳定性与紧凑结构设计,在简单重复作业场景中展现出***优势:1.食品分拣应用采用伺服电机直驱技术,实现150次/分钟的高速抓取(加速度达15m/s²)集成TrueVision视觉系统,通过RGB+近红外双光谱检测饼干颜色/缺损,分拣准确率(误检率<)柔性夹爪设计可适应5-100mm规格包装盒,更换夹具时间≤30秒2.注塑自动化耐高温版本(IP67防护)直接接触180℃模具取件,循环时间控制在±预编程轨迹实现取件-去水口-摆盘全流程,定位精度±,自动补偿塑料件收缩变形(补偿量)该机型负载覆盖8-20kg,重复定位精度±,特别适合食品、电子、日化等行业的高节拍生产(>120件/分钟)。经实测,较六轴机器人方案可降低25%能耗,投资回收期<12个月。安徽ABB660机器人维护保养维保机械臂的气动管路,可防止因漏气影响动作速度,浙江展杭查漏维修,恢复管路正常气压。
金属加工领域的激光切割车间,工业机器人在高温、高粉尘环境中执行精密切割任务。长期使用后,激光头聚焦精度、机器人关节灵活性会有所下降,影响切割质量和效率。智小杭售后服务团队拥有专业的激光设备校准技术,配备高精度的检测仪器,能 精确调整激光头参数,恢复切割精度。对于机器人关节等易损部件,提供预防性维护方案,定期更换润滑油、密封件等,延长设备使用寿命。曾有一家金属加工企业,其激光切割机器人的切割精度出现明显下降,智小杭工程师到达现场后,通过对激光头的焦距、光斑大小等参数进行精确测量和调整,并对机器人的机械手臂进行多方面校准,使切割精度恢复到初始状态。售后工程师还会对企业操作人员进行安全操作培训,降低因操作不当引发设备故障的风险,同时分享行业 精确的加工工艺和设备优化方案,助力企业提升竞争力。
一旦有人体不慎闯入危险区域,机器人会瞬间响应,即刻停止运行,多方位保障学生的人身安全。实训台上对工作区域进行了清晰明了的划分,涵盖零部件存放区、组装操作区、成品暂存区等,学生可依照既定流程,有条不紊地开展组装工作。工作原理零部件准备:将鼠标的外壳、电路板、按键、滚轮等各类零部件,依据不同类别,有序放置在实训台的零部件存放区。每个零部件均有专属的固定位置,并配备醒目标识,方便机器人通过内置的视觉识别系统快速捕捉、精确识别,进而实现精确抓取。机器人协作组装:台机器人主要承担抓取鼠标外壳的任务。它借助内置的**视觉识别系统,能够在瞬间精确定位外壳的空间位置与姿态,随后凭借机械手臂,以极高的精度将外壳稳稳放置在组装操作区的**点位。第二台机器人则专注于抓取电路板、按键等内部零部件,依据预设的精密程序,精确调控力度与角度,将这些零部件逐一牢固安装到鼠标外壳内部。两台机器人依托实时通信技术与精妙的协同算法,实现动作的无缝衔接与紧密配合。例如,当***台机器人完成外壳放置动作后,会即刻向第二台机器人发送信号,第二台机器人接收到信号后,迅速启动零部件安装操作,有效规避了相互等待与动作相冲。检测机械臂的电池电量,防止因断电丢失程序数据,有问题找浙江展杭,及时更换电池保数据。
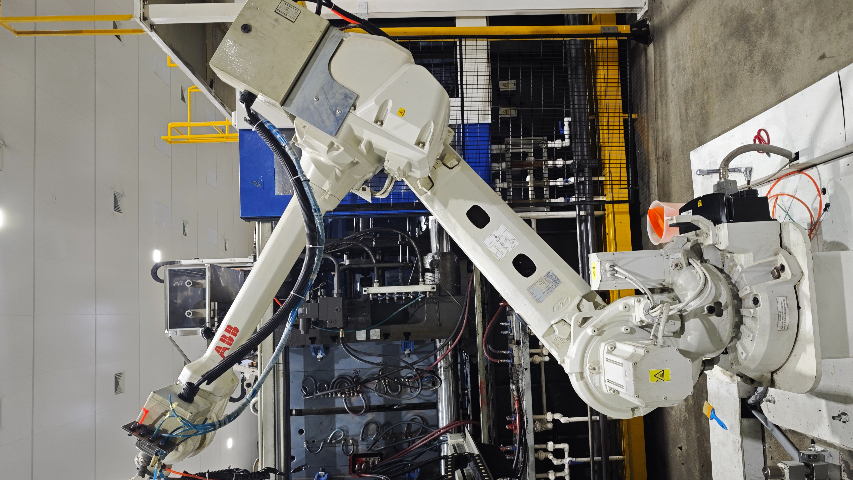
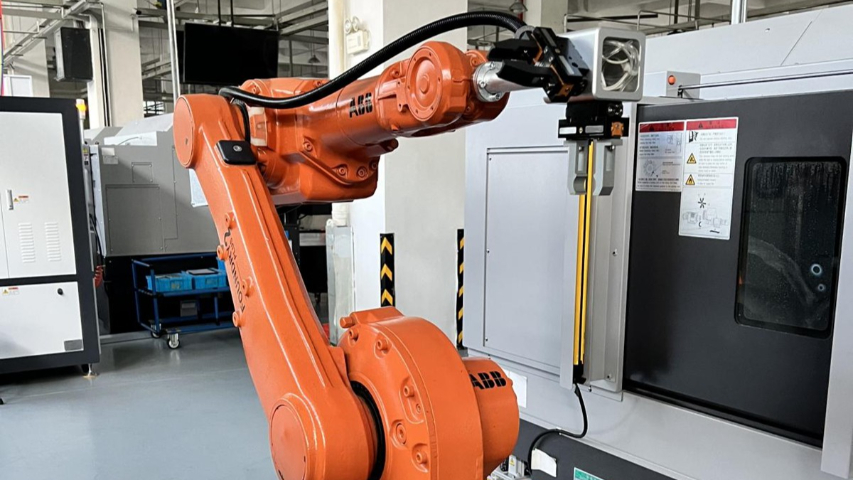
监控确保物料在不同环节间顺畅流转;以及各类传感器,用于实时监测机器人、车床及物料的状态,为整个系统的安全稳定运行提供保障。工作原理物料识别与定位:在料仓处设置先进的视觉识别系统,对放置其中的开关元器件坯料进行精确识别与定位。利用先进的图像算法,快速获取坯料的形状、尺寸及位置信息,并将这些数据传输至机器人控制系统。机器人取料与上料:机器人1600依据视觉系统反馈的信息,规划便捷运动路径,移动至料仓抓取坯料。其末端执行器根据坯料的形状和尺寸,自动调整抓取力度与方式,确保抓取牢固。随后,机器人迅速将坯料运送至机加工车床的装夹位置,精确完成上料操作。车床加工:机加工车床在接收到上料完成信号后,立即启动加工流程。依据预先设定的程序,对坯料进行高精度的切削、钻孔等加工操作,将坯料转化为符合要求的开关元器件成品。机器人下料与卸料:加工完成后,车床发出信号,机器人1600再次动作,准确抓取成品并将其放置到指定的传输轨道或成品料仓。在整个过程中,机器人的动作与车床的加工节奏紧密配合,实现高效、连续的自动上下料作业。项目优势明显提升生产效率:机器人1600的高速运行与精确动作,大幅缩短了上下料时间。检测机械臂的安全光栅,防止因故障失去防护功能,有问题找浙江展杭,恢复光栅正常防护。三明ABB7600 机器人维护保养
ABB机器人电池更换,避免数据丢失风险,有问题找浙江展杭,延长设备使用寿命。福州ABB660机器人保养
为高效服务提供人才支撑。依托在浙江地区着力打造的“4小时服务圈”,当机器人出现紧急故障时,技术团队可迅速抵达现场,以“如影随形”的响应速度将停机损失降至可控——这一服务时效承诺,在区域内形成竞争优势。品牌合作背书,彰显服务专业度作为曾经ABB授权服务商,浙江展杭工程师拥有ABB系列培训资质,而ABB作为全球闻名的机器人及自动化企业,其授权资质的获取需通过严格的技术能力与服务标准考核。这一背书不*印证了公司在机器人服务领域的专业水准,更意味着客户可享受到与国际品牌标准同步的服务品质,为服务可靠性增添重要砝码。从生产线的机器人紧急抢修到常态化的设备维保,浙江展杭以“专业、专一、可靠”的服务理念,在机器人服务领域树立起差异化竞争力。如需体验高效、专业的机器人服务,可致电,感受“让您倍感安心”的服务力量。福州ABB660机器人保养
化工原料的自动化输送环节,防爆工业机器人在易燃易爆环境中安全作业,对设备的安全性和稳定性要求极高。为...
【详情】在协作机器人应用中,智小杭实施“人机交互安全强化方案”:通过力觉传感器定期标定(灵敏度±0.1N...
【详情】ABBFlexPendant示教器采用图形化交互设计,配备8英寸高灵敏度触摸屏,支持多种编程模式...
【详情】极大提升了组装效率。成品检测与包装:组装完成的鼠标会被移送至成品暂存区,由学生或检测设备进行基础功...
【详情】确保物料在不同环节间顺畅流转;以及各类传感器,用于实时监测机器人、车床及物料的状态,为整个系统的安...
【详情】到减速器精度检测、伺服系统性能校准,再到安全回路测试与软件系统优化,每一项流程均明确标准与时限...
【详情】跨越山海,专业护航:浙江展杭服务技术助力中国智造扬帆出海2025年7月8日——近日,浙江展杭技术团...
【详情】工业机器人在汽车制造行业中广泛应用于焊接、喷涂、装配等环节,其高精度与高效性 提升生产线产能。以焊接...
【详情】锂电池电芯上下料生产线的工业机器人,在高洁净环境下作业,其防尘密封部件和精密传动装置容易受到污染和磨...
【详情】在工业机器人使用过程中,关节轴承磨损是导致定位误差的首要因素。保养时需采用激光跟踪仪进行重复定位精度...
【详情】六轴工业机器人在汽车焊装车间的技术集成与应用在现代化汽车焊装车间中,六轴工业机器人通过高精度激光视...
【详情】锂电池电芯上下料生产线的工业机器人,在高洁净环境下作业,其防尘密封部件和精密传动装置容易受到污染和磨...
【详情】