机器人在家具板材的上下料生产线中可以使用到的搬运机器人,需要搬运大尺寸、重质量的板材,其液压驱动系统和机械结构承受较大负荷。某家具厂的搬运机器人运行 2 年后,出现液压系统漏油、机械臂变形的问题。智小航维护团队对液压系统进行多方面检修,更换老化的密封件和液压管路,对液压泵和液压缸进行性能测试和修复。对变形的机械臂进行矫正和加固,使用高度材料进行补强。经过维护,机器人使用寿命从 4 年延长至 7 年,搬运能力提升 30%。中空手腕的密封性检查能防止切削液渗入,保护内部线缆和气管,浙江展杭专业保养,延长部件使用寿命。浙江ABB52机器人保养
机器人在汽车滤清器生产的组装线中可以使用到,组装机器人需要精确安装滤芯、端盖等部件,机械手指和传动皮带容易磨损。某滤清器厂的组装机器人运行 2 年后,出现部件安装不到位的情况。智小航维护人员更换高度机械手指,采用齿形皮带替换普通皮带,提高传动精度和可靠性,同时对机器人的视觉定位系统进行校准和优化。建立易损件库存预警机制,根据设备运行数据提前储备备件。经过维护,该机器人使用寿命从 4 年延长至 6 年,产品组装合格率提高了 25%。合肥ABB4600机器人售后热线对机械臂的齿轮齿条进行维护,可减少磨损,浙江展杭保养调试,延长传动部件寿命。
浙江展杭提供多品牌机器人维护保养升级改造等服务ABB机器人型号:IRB120、IRB140、IRB1410、IRB1600、IRB2600、IRB360、IRB460、IRB4400、IRB4600、IRB52、IRB6620、IRB6640、IRB6650、IRB6660、IRB6700、IRB7600。发那科机器人型号:M-10iA、M-20iA、M-710iC、M-410iC、M-410iB、F-200iB、M410、M200。忧傲机器人型号:UR3、UR3e、UR5、UR5e、UR10、UR10e、UR16e。库卡机器人型号:KR10、KR3、KR16、KR20、KR30、KR60、KR180、GP7、GP8、GP12。安川机器人型号:GP25、GP35、GP50、GP180机、MPX3500、MPX2600、MPX1950、SP系列和AR系列。史努比陶机器人型号:TX200、TX2-160、TX2-140、TX2-90。埃斯顿机器人及其他品牌机器人浙江展杭提供定制技术支持和升级改造方案,帮助您打造智能化生产线。作为可靠的机器人维护与技术伙伴,定制保养计划和定期巡检,确保机器人始终处于稳定状态,提供24小时技术支持,为的生产带来高效稳定提供技术支持。
工业机器人作为现代智能制造的机械设备,其工作效率直接影响生产线产能。然而机器人长期高度运行会导致零部件磨损、润滑失效等问题。智小杭提供的工业机器人维护保养服务,通过定期检查减速器、伺服电机等关键部件,及时更换老化密封圈与润滑油,有效降低机械磨损率。例如,某汽车焊接车间采用智小杭的年度保养计划后,机器人故障率降低40%,整机寿命延长3年以上。科学的维护不 能减少意外停机损失,更能通过预防性保养提高设备稳定性。清理机械臂的操作面板,防止因按键失灵影响控制,有问题找浙江展杭,修复面板便捷操作。

为高效服务提供人才支撑。依托在浙江地区着力打造的“4小时服务圈”,当机器人出现紧急故障时,技术团队可迅速抵达现场,以“如影随形”的响应速度将停机损失降至可控——这一服务时效承诺,在区域内形成竞争优势。品牌合作背书,彰显服务专业度作为曾经ABB授权服务商,浙江展杭工程师拥有ABB系列培训资质,而ABB作为全球闻名的机器人及自动化企业,其授权资质的获取需通过严格的技术能力与服务标准考核。这一背书不*印证了公司在机器人服务领域的专业水准,更意味着客户可享受到与国际品牌标准同步的服务品质,为服务可靠性增添重要砝码。从生产线的机器人紧急抢修到常态化的设备维保,浙江展杭以“专业、专一、可靠”的服务理念,在机器人服务领域树立起差异化竞争力。如需体验高效、专业的机器人服务,可致电,感受“让您倍感安心”的服务力量。维保机械臂的力传感器,可确保力反馈准确,浙江展杭校准调试,保障作业安全与质量。衢州ABB4600机器人维修
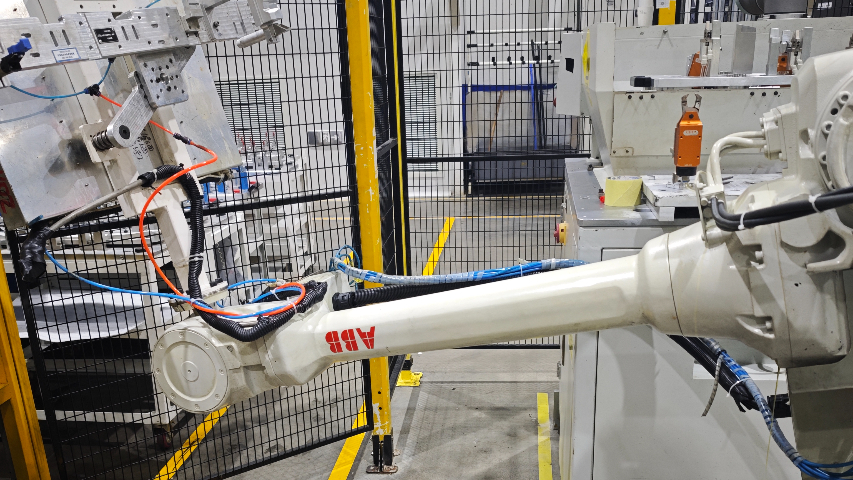
定期检查机械臂的液压系统,防止漏油影响工作效率,浙江展杭排查维修,保障液压系统稳定。浙江ABB52机器人保养
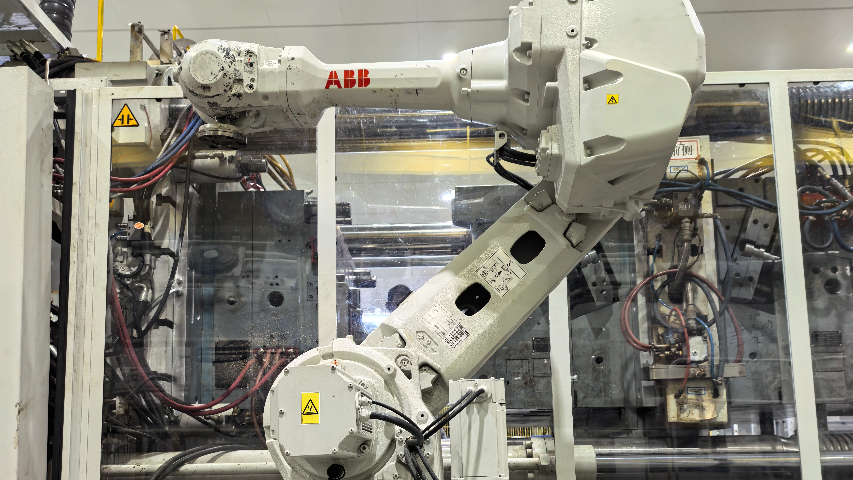
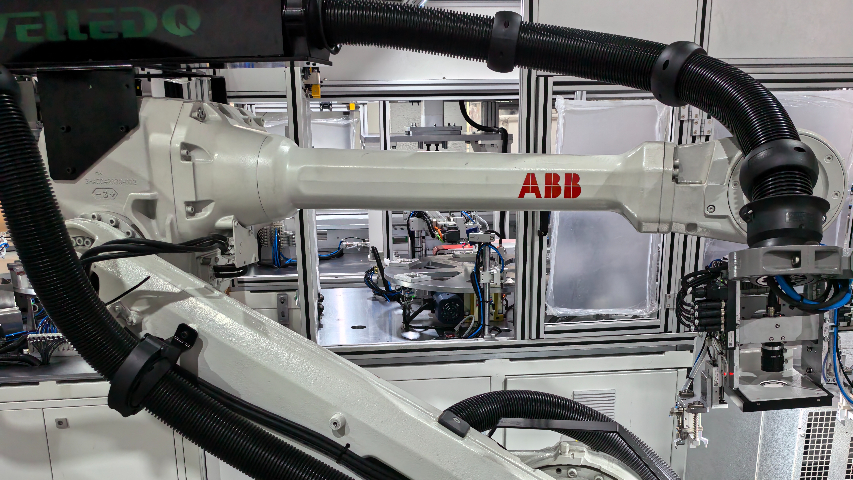
机器人型号:4600配合康耐视3D视觉对小车内的产品进行有序抓取放置到输送线上。工作原理视觉识别:康耐视3D视觉系统首先对小车内的印钞产品进行扫描,获取产品的三维图像数据。然后通过图像处理算法,对图像进行分析和处理,识别出产品的位置、形状、姿态等信息,并将这些信息传输给机器人控制器。路径规划:机器人控制器根据视觉系统提供的产品信息,结合机器人的当前位置和姿态,规划出便捷的抓取路径和动作序列。在规划路径时,会考虑机器人的运动学和动力学约束,以及避免与周围环境和设备发生碰撞等因素。抓取操作:机器人按照规划好的路径和动作序列,运动到产品上方,通过末端执行器(如夹具)对产品进行抓取。在抓取过程中,机器人会根据视觉系统实时反馈的产品位置信息,对抓取动作进行微调,确保抓取的准确性和稳定性。放置输送:机器人抓取产品后,按照预设的路径将产品放置到输送线上。输送线将产品输送到下一个生产环节,完成整个拆垛和输送过程。浙江ABB52机器人保养
浙江展杭已与多家企业签订长期维修与保养合作协议,深受客户信赖。服务理念:秉承“顾客至上,...
【详情】精密模具打磨机器人要求纳米级精度,微小的机械磨损和热变形都会导致模具报废。某模具厂的打磨机器人运行 ...
【详情】在家电制造的注塑车间,工业机器人能高效完成塑料件成型任务。随着生产规模扩大,设备使用频率增加,注塑机...
【详情】陶瓷制品上下料生产线的机器人,在搬运过程中需要频繁调整姿态,其关节部位的轴承和传动齿轮易磨损。某陶瓷...
【详情】机器人在汽车滤清器生产的组装线中可以使用到,组装机器人需要精确安装滤芯、端盖等部件,机械手指和传动皮...
【详情】化工原料的自动化输送环节,防爆工业机器人在易燃易爆环境中安全作业,对设备的安全性和稳定性要求极高。为...
【详情】在协作机器人应用中,智小杭实施“人机交互安全强化方案”:通过力觉传感器定期标定(灵敏度±0.1N...
【详情】ABBFlexPendant示教器采用图形化交互设计,配备8英寸高灵敏度触摸屏,支持多种编程模式...
【详情】极大提升了组装效率。成品检测与包装:组装完成的鼠标会被移送至成品暂存区,由学生或检测设备进行基础功...
【详情】确保物料在不同环节间顺畅流转;以及各类传感器,用于实时监测机器人、车床及物料的状态,为整个系统的安...
【详情】到减速器精度检测、伺服系统性能校准,再到安全回路测试与软件系统优化,每一项流程均明确标准与时限...
【详情】跨越山海,专业护航:浙江展杭服务技术助力中国智造扬帆出海2025年7月8日——近日,浙江展杭技术团...
【详情】