生产线以结合当地持色,以86式插座会实训对象,方案设计主要分为16个单元组成,双腕机器人86式插口装配单元、工业机器人上下料工作站、双腕机器人通电检测单元、工业机器人面板安装单元、工业机器人底盒打螺丝单元、工业机器人面板总装下科单元、物流输送线单元、立体仓库单元、RFID系统、手机下单系统、智能...
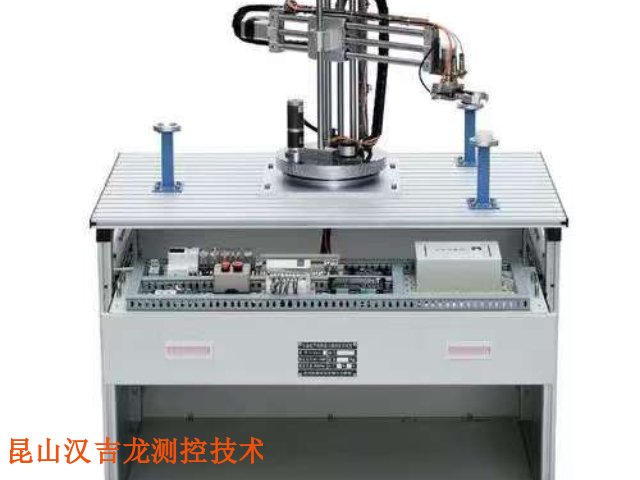
运动控制实训平台基本参数
- 品牌
- HOJOLO,LEAKSHOOTER,VALENIAN,VA
- 型号
- VT-ZP160
- 类型
- 操控实训台
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 10
- 外形尺寸
- 1900x1000x1200
- 重量
- 10
- 产地
- 昆山
- 厂家
- 汉吉龙测控技术有限公司
运动控制实训平台企业商机
运动实训平台的操作流程与企业实际生产流程通常存在一定的契合度,但由于各自的目标、环境等因素不同,也会有一些差异,具体分析如下:存在的契合点基本运动操控原理一致:运动实训平台会涉及电机操控、运动轨迹规划、速度与位置操控等基础操作,这与企业生产中自动化生产线的运动操控原理是相同的。例如在汽车制造企业的自动化装配生产线中,机械臂的运动操控和在运动实训平台上对机械臂进行编程操控其抓取、放置动作等所依据的原理一致,都是通过操控器发送指令来驱动电机实现特定的运动轨迹。操作逻辑与安全规范类似:运动实训平台为了确保操作人员安全和设备正常运行,会设定一系列操作逻辑和安全规范,如开机前检查、急停按钮设置、操作顺序等。企业实际生产中更是把安全放在**,有着严格的安全操作规程,且在操作逻辑上也强调按顺序进行设备启动、参数设置、运行操作等,以保证生产过程的稳定性和产品质量。涉及相似的工艺过程:一些运动实训平台会模拟企业生产中的典型工艺过程,如物料搬运、零件加工等。以物流仓储企业为例,运动实训平台上模拟的自动导引车(AGV)搬运物料的过程,与企业仓库中AGV实际运行流程相似,包括任务下达、路径规划、物料取放等环节。 运动实训平台的数据分析功能能否生成可视化报告?湖北运动控制实训平台

运动操控设备的自我诊断功能在检测通信故障方面虽有一定作用,但受多种因素限制,存在不少局限性,主要体现在复杂故障判断、间歇性故障捕捉、通信协议深度解析等方面,具体如下:复杂通信故障判断困难多重故障叠加:当多个通信故障同时发生或通信故障与其他类型故障(如硬件故障、软件故障)相互交织时,自我诊断功能可能难以准确分辨出具体的故障原因和位置。例如,网络通信中断可能是由于网线损坏、网络接口故障以及软件中网络配置错误等多种原因共同导致,自我诊断功能可能只能检测到通信中断这一现象,而无法明确指出具体是哪个环节出现了问题。级联故障分析:在复杂的运动网络中,通信故障可能会引发一系列的连锁反应,产生级联故障。自我诊断功能往往只能检测到直接的通信异常,对于由通信故障引发的后续间接故障,可能无法准确判断其根源是通信问题,还是其他受影响的部件或系统出现了故障。 多功能运动控制实训平台公司平台的实训项目是否能培养学生的质量把控和成本意识?
操控技术调速操控:包含直流电机调速系统(如V-M系统、PWM调速系统)和交流电机调速系统(如变频调速、矢量操控、直接转矩操控等)的原理、操控策略和实现方法,让学员了解不同调速方式的特点和应用场景。位置操控:讲解位置操控系统的组成和工作原理,如开环位置操控、闭环位置操控(包括基于编码器、光栅尺等位置检测元件的反馈操控),以及常用的位置操控算法(如PID操控、模糊操控、预测操控等),使学员掌握如何精确操控运动部件的位置。多轴联动操控:针对多轴运动操控系统,介绍多轴之间的协调操控原理和方法,如直线插补、圆弧插补等插补算法,以及电子齿轮、电子凸轮等功能的实现,培养学员对复杂运动轨迹的操控能力。系统构成操控器:介绍各种运动操控器的原理、功能和应用,如PLC运动操控模块、运动操控卡、**运动操控器等,使学员掌握不同操控器的编程方法和使用技巧。驱动器:讲解电机驱动器的工作原理、性能指标和选型方法,以及驱动器与电机、操控器之间的连接和调试方法,让学员了解如何为电机提供合适的驱动信号。传感器:包括位置传感器(如编码器、光栅尺、旋转变压器等)、速度传感器(如测速发电机、光电编码器等)和力传感器等的工作原理、选型和应用。
要进一步提高运动操控设备自我诊断功能检测通信故障的准确性,可以从完善检测技术、优化通信系统、提升数据分析能力和强化管理措施等方面入手,以下是详细介绍:完善检测技术多维度监测:增加对通信过程中更多参数的监测,除了传统的信号强度、误码率等指标,还可监测信号的相位、频率稳定性、通信延迟等。通过多维度的数据采集,更***地了解通信状态,提高故障判断的准确性。例如,在无线通信中,监测信号的相位变化可以帮助发现因信号干扰导致的相位失真问题,从而及时识别通信故障。采用算法:引入人工智能和机器学习算法,如神经网络、支持向量机等,对采集到的通信数据进行分析和处理。这些算法可以学习正常通信和故障通信的模式,从而更准确地识别各种通信故障。通过对大量历史通信数据的学习,神经网络可以迅速判断当前通信状态是否正常,并准确指出故障类型。实时监测与动态调整:提高自我诊断功能的监测频率,实现实时监测通信状态。同时,根据设备的运行情况和环境变化,动态调整监测参数和诊断策略。在通信环境复杂或设备负载变化较大时,自动增加监测频率和分析的细致程度,以便及时发现潜在的通信故障。优化通信系统冗余设计:采用通信冗余技术。 运动实训平台能模拟多机器人协同运动的场景吗?

VALENIAN注重实践操作遵循操作流程:开始操作前,务必熟悉平台的操作流程和安全规范。按照正确的步骤进行设备的启动、参数设置、运行操作等,避免因误操作导致设备损坏或安全。在操作过程中,严格遵守安全注意事项,如佩戴好防护装备等。开展基础练习:从平台的基础操作开始练习,如电机的点动操控、速度调节、简单的位置操控等,熟悉各个操作按钮、旋钮和软件界面的功能。逐渐增加操作的难度和复杂度,进行多轴联动操控、复杂轨迹规划等练习,不断提升操作技能。进行故障排查:在实践操作中,故意设置一些常见的故障,如线路连接故障、传感器故障、参数设置错误等,然后尝试自己进行故障排查和修复。通过实际的故障排查过程,加深对平台硬件和软件的理解,提高解决实际问题的能力。 当同时运行多个复杂运动任务时,运动实训平台的响应速度如何?送料设备运动控制实训平台用途
操作运动实训平台时,怎样避免因参数设置错误导致设备损坏?湖北运动控制实训平台
运动操控设备的自我修复功能未来有以下发展趋势:智能化与自主化程度不断提高故障预测与主动修复:借助人工智能和机器学习算法,设备将能够基于大量的运行数据和历史故障案例,建立故障预测模型。通过实时监测设备的运行状态和关键参数,**可能出现的故障,并在故障发生前主动采取措施进行修复或调整,将故障萌芽状态,减少设备停机时间。自主决策与修复策略优化:未来的运动操控设备自我修复功能将具备更强的自主决策能力,能够根据不同的故障类型、严重程度以及设备的运行环境等因素,自动选择比较好的修复策略。同时,还能通过对修复过程和结果的不断学习和分析,持续优化修复策略,提高修复效率和成功率。与其他技术深度融合与物联网技术融合:通过物联网技术,运动操控设备可以实现更***的互联和数据共享。不*能够将自身的运行状态和故障信息实时上传到云端或管理平台,还可以从其他相关设备或系统获取更多的运行数据和环境信息,为自我修复提供更***的数据支持。与区块链技术融合:区块链技术可以为运动操控设备的自我修复功能提供安全、可靠的分布式数据存储和认证机制。确保设备运行数据和修复记录的真实性、完整性和不可篡改。湖北运动控制实训平台
与运动控制实训平台相关的文章
教学运动控制实训平台系统
- 共享运动控制实训平台哪家好 2025-02-28
- 维护运动控制实训平台怎么用 2025-02-26
- 高校运动控制实训平台装置 2025-02-26
- 定制运动控制实训平台哪里买 2025-02-25
- 6轴运动控制实训平台服务 2025-02-23
- ABB运动控制实训平台课程 2025-02-22
- 瓦伦尼安运动控制实训平台厂家排名 2025-02-19
- 预测性运动控制实训平台视频 2025-02-19
- 智能化运动控制实训平台电话 2025-02-17
- 共享运动控制实训平台价格 2025-02-15
- 分炼运动控制实训平台 2025-02-13
- 教学运动控制实训平台服务 2025-02-11
与运动控制实训平台相关的产品

与运动控制实训平台相关的新闻
-
人机界面运动控制实训平台产线 2025-02-05 13:44:41运动操控设备的自我诊断功能在检测通信故障方面虽然很有用,但也存在一些局限性,主要体现在复杂故障诊断、间歇性故障检测、非标准协议及环境干扰等方面,具体如下:复杂通信故障诊断能力有限多因素并发故障:当通信故障是由多个因素同时出现问题导致时,自我诊断功能可能难以准确判断具体的故障原因。例如,网...
-
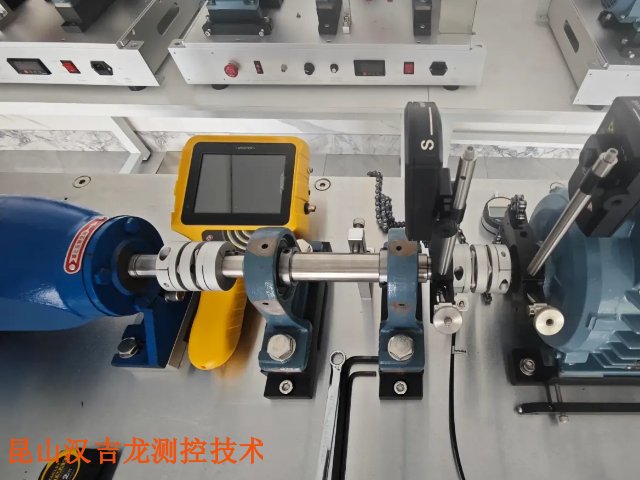
运动控制实训平台生产 2025-02-05 15:07:19运动控制综合实训平台,它集二轴定位模型、PLC、步进运动控制系统、伺服运动控制系统、人机界面、传感器等技术于一体的实训教学装置,适合机电一体化、电气 工程、自动化等专业实训教学、课程设计、毕业设计。、实训项目任务一:步进电机及驱动器的使用1.步进电机及驱动器的选型2.步进电机及驱动器控制回路的接线3...
-
PLC运动控制实训平台供应商 2025-01-27 04:07:29增强设备自感知能力:增加设备内部的监测点和传感器种类,实现对设备更多运行状态参数的实时监测。例如,在关键部件上安装温度传感器、振动传感器等,获取更多与故障相关的信息,为故障诊断提供更丰富的数据来源。提高设备通信可靠性:采用可靠的通信协议和通信方式,确保设备之间的数据传输准确无误。增加通信...
-
共享运动控制实训平台厂家 2025-01-25 02:07:09安装电磁和滤波装置:在运动操控设备和通信线路周围安装电磁装置,如电缆、金属罩等,减少外部电磁干扰对通信信号的影响。同时,在电源和信号线路上安装滤波装置,滤除电磁干扰信号,提高通信的稳定性和可靠性。部署环境监测与调控系统:在设备运行环境中部署环境监测传感器,实时监测温度、湿度、灰尘等环境参...
与运动控制实训平台相关的问题
与运动控制实训平台相关的标签
新闻资讯
产品推荐
-

往复式激光对中仪价格
2026-07-04 -
北京专业轴找正仪
2026-07-04 -
振动激光对中仪视频
2026-07-04 -

机电激光对中仪哪里买
2026-07-04 -

河北电机轴找正仪
2026-07-04 -

爱司联轴器不对中测量仪贴牌
2026-07-04 -

进口激光对中仪供应商
2026-07-04 -
高校激光对中仪使用
2026-07-04 -

经济型法兰联轴器对中仪用途
2026-07-04