电缸实时调整运动参数主要依赖于其内置的控制系统和传感器。以下是具体的实现方式:传感器反馈:电缸通常配备有多种传感器,如位置传感器、速度传感器和力传感器等。这些传感器能够实时监测电缸的运动状态和外部负载变化,并将这些信息反馈给控制系统。控制系统处理:控制系统接收到传感器的反馈信号后,会进行实时处理和分析。通过与预设的运动参数进行比较,控制系统能够计算出需要调整的参数值,以确保电缸按照预定的轨迹和要求进行运动。调整输出信号:控制系统根据计算结果,调整输出给电缸的驱动信号。这些驱动信号可以是电流、电压或脉冲信号等,用于控制电缸的电机转动,从而调整其位置、速度和加速度等运动参数。实时响应:电缸的驱动系统接收到调整后的驱动信号后,会立即作出响应,使电缸按照新的运动参数进行运动。由于控制系统的实时性和电缸的快速响应性,这种参数调整可以在非常短的时间内完成,从而实现实时调整运动参数的效果。综上所述,电缸通过传感器反馈、控制系统处理、调整输出信号和实时响应等步骤,实现运动参数的实时调整。这种能力使得电缸能够适应不同的工作场景和需求,提供精确、快速和可靠的运动控制。 电缸的灵活性使其能够适应不同的生产需求。浙江长电缸
电缸的精度实现涉及到多个方面,包括机械设计、控制系统、驱动器、传感器等。以下是一些实现电缸高精度的关键因素:机械设计:电缸的机械设计是实现高精度的关键。在设计中,需要考虑到导轨、轴承、丝杠等部件的精度和刚度,以及各部件之间的装配精度。同时,需要合理设计电缸的结构,以减小热变形和振动对精度的影响。控制系统:控制系统是实现电缸高精度的要点。控制系统需要能够精确控制电机的运动,包括速度、位置和推力等。同时,控制系统还需要能够实时处理传感器反馈的数据,对电缸的位置和速度进行实时调整,以保证高精度运行。驱动器:驱动器是实现电缸高精度的关键部件。选择高精度的伺服驱动器和控制器是保证电缸高精度运行的关键。伺服驱动器和控制器能够精确控制电机的运动,从而实现高精度的位置和速度控制。传感器:传感器是实现电缸高精度的重要部件。传感器能够实时监测电缸的位置和速度,并将数据反馈给控制系统。选择高精度的传感器和编码器是保证电缸高精度运行的重要措施。装配和调试:装配和调试也是实现电缸高精度的重要环节。在装配过程中,需要保证各部件之间的装配精度,以减小误差。在调试过程中,需要对电缸的运动参数进行精确调整。 天津三电缸电缸的行程末端可以通过缓冲装置减少冲击。

电缸高精度实现的关键因素主要包括以下几个方面:结构设计:电缸的结构设计直接影响其精度。导轨的质量和制造精度、传动结构的设计、机械刚度等因素都会对电缸的精度产生重要影响。因此,在设计电缸时需要充分考虑这些因素,以提高结构的刚度和精度。电机性能:电机是电缸的动力来源,其性能对电缸的精度有很大影响。高性能的电机通常具有响应速度快、转矩平滑、定位精度高等特点,能够确保系统快速、精确地响应控制信号,从而提高电缸的精度。传动部件精度:电缸的传动部件,如丝杆、螺母等,对精度也有重要影响。这些部件的制造质量和与电机的匹配度对精度影响较大。例如,丝杆的螺距、导程以及传动装置的间隙等都会直接影响到电缸的定位精度。控制策略:控制策略是实现电缸高精度的关键。控制系统需要能够实时处理传感器反馈的数据,对电缸的位置和速度进行实时调整,以保证高精度运行。闭环控制系统(例如采用编码器反馈)可以实时纠正位置误差,提高运动的准确性。环境因素:环境因素也会对电缸的精度产生影响。例如,温度、湿度、振动等环境因素可能会影响电缸的稳定性和精度。因此,在应用中需要对这些因素进行控制和补偿,以确保电缸的精度。
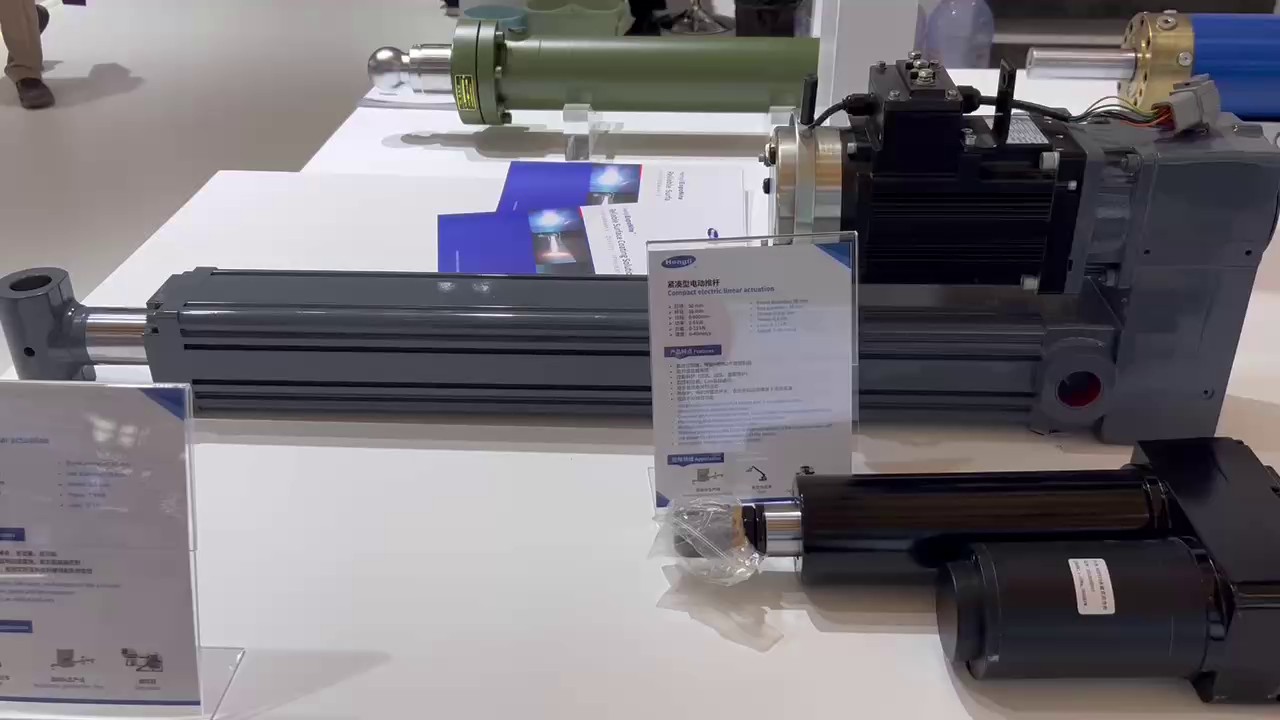
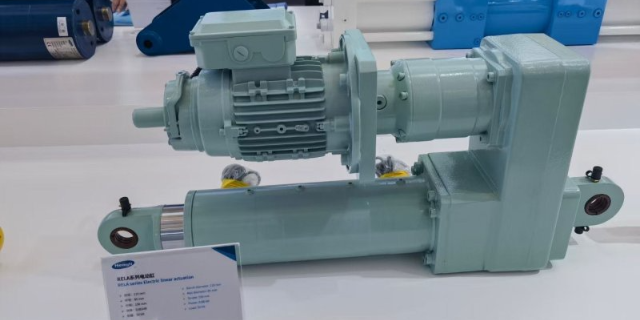
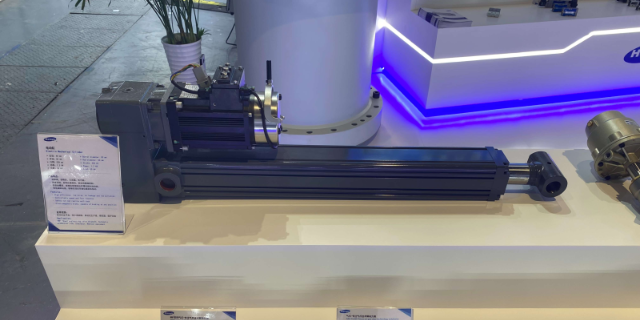
电缸的主体结构主要包括电动机、螺杆或滑块、导轨、传动装置和外壳等部分。其中,电动机是电缸的动力源,通过将电能转化为机械能来驱动螺杆或滑块进行直线运动。根据实际应用需求,可以选择合适的电动机类型和参数。螺杆或滑块是电缸的运动部件,与电动机相连,通过电动机的旋转运动实现直线运动。导轨、滑块和传动装置等部件共同组成了电缸的机械系统,用于支撑、导向和传递运动。外壳则是电缸的外部结构,起到保护和安装固定等作用。在电缸的结构中,还包括各种零部件,如轴承、联轴器、密封件、弹簧等。这些零部件对于保证电缸的性能和稳定性起着重要作用。例如,轴承可以支承电缸的旋转部件,联轴器则可以将电动机的动力传递给螺杆或滑块,密封件可以防止电缸内部的润滑油泄漏或外部灰尘进入,弹簧则可以起到缓冲和补偿的作用。总之,电缸的主体结构和各种零部件共同作用,实现了电缸的直线运动功能。根据实际应用需求,选择合适的电缸型号和参数,并进行正确的安装和维护,可以保证电缸的性能和稳定性。 电缸的维护相对简单,降低了使用成本。
电缸与上位机之间的通信协议是一种用于实现两者之间数据交换的规则和标准。通过通信协议,上位机可以对电缸进行控制,同时也可以获取电缸的状态信息。通信协议包括硬件接口和软件协议两个部分。硬件接口定义了通信所使用的物理介质和连接器类型,常见的包括串口、USB、以太网等。软件协议则定义了数据传输的格式、命令集、数据校验等内容,用于保证数据传输的正确性和可靠性。在选择通信协议时,需要考虑以下几个因素:通信速度:通信速度决定了数据传输的快慢,需要根据实际需求进行选择。数据传输质量:数据传输质量决定了数据传输的准确性和稳定性,需要选择可靠性高的协议。设备兼容性:需要考虑所选协议是否被多数支持,以及是否与其它设备兼容。调试和维护:需要考虑协议的调试和维护是否方便,以及是否有完善的文档支持。常见的电缸与上位机之间的通信协议包括Modbus、CAN、Profibus等。这些协议各有特点,需要根据实际需求进行选择。其中,Modbus协议是一种通用的通信协议,被应用于各种工业自动化设备之间的通信和控制。 电缸的行程长度可以根据需求定制。上海伺服电缸品牌有哪些
电缸在重载应用中表现出色。浙江长电缸
电缸在飞行模拟设备中通过提供精确的位置、速度和加速度控制,以及与飞行控制系统的紧密配合,实现逼真的飞行体验。具体实现方式如下:六自由度运动模拟:飞行模拟设备通常采用六自由度运动平台,通过六个电缸的协同控制,实现平台在三维空间内的任意运动。这些运动包括升降、俯仰、滚转、偏航、前后移动和左右移动,从而模拟飞机的各种飞行姿态和动作。高精度运动控制:电缸具备高精度的位置控制能力,可以确保飞行模拟设备在运动过程中的精确性和稳定性。通过与飞行控制系统的实时通讯,电缸可以根据模拟飞行场景的需求,实时调整运动参数,以实现更加逼真的飞行体验。快速响应和高速运动:电缸具备快速响应和高速运动的能力,可以迅速跟随飞行控制系统的指令,实现飞行模拟设备的快速运动。这种能力对于模拟飞机的起飞、降落和高速飞行等场景尤为重要,有助于提高飞行模拟的逼真度。实时反馈和力感模拟:电缸可以通过力传感器等装置,实时监测和反馈运动过程中的力学信息,如阻力、惯性力等。这些信息可以与飞行控制系统相结合,实现力感模拟,使飞行员在模拟飞行中感受到真实的力学反馈,增强飞行体验的沉浸感。综上所述。 浙江长电缸