- 品牌
- 汇像
- 型号
- HelenX-5
- 适用范围
- 实验室
- 加工定制
- 是
- 外形尺寸
- 800x600x700
- 工作电压
- 48
- 电源
- 100-240VAC,50-60Hz
- 重量
- 28KG
- 产地
- 上海
- 厂家
- 汇像
- 尺寸
- 540mm*620mm*700mm
- 重复定位精度
- +/-0.02mm
- 负载
- 3kg
- 工具速度
- 2500mm/s
- 平均功率
- 150w
- 末端工具( 选配)
- 力控抓手:支持距离力矩双模式控制,夹持力0-80N 可调
- 视觉系统
- 可选配
- 语音交互
- 可选配
- 工作环境温度范围(°C)
- 0-50℃
- 工作环境湿度
- 90%相对湿度(非冷凝)
面向食品、环境、疾控等公共安全检测领域,汇像机械臂专注解决前处理繁琐、人工误差大、职业暴露风险高等痛点。机械臂可自动完成样品称量、均质、萃取、净化、加标、上机等流程,适配重金属、农残、兽残、微生物、理化指标等多项目检测。高适应性末端执行器可处理瓶装、袋装、皿式、管式等多种样品包装,支持批量处理与 7×24 小时连续运行。设备兼容 ICP、LC-MS、GC-MS、酶标仪等主流分析仪器,实现 “前处理 — 检测 — 数据” 全链路自动化,服务于疾控中心、环境监测站、食品药企质检、第三方检测机构。适应性强,汇像移动式机械臂结合AGV底盘,打破固定工位限制,轻松完成跨房间、跨楼层的物料转运。西安五轴 机械臂厂商
机械臂
汇像科技协作机械臂,带有人机协作安全防护功能,具备碰撞避让、紧急暂停特性,可与科研人员同空间作业,适配疾控检测实验室安全作业需求。这款机械臂可快速更换末端执行器,适配离心管、96孔板、培养皿等多种实验耗材,完成样本分拣、菌落挑取、试剂分装等操作,应对疾控批量样本检测场景。设备部署灵活,无需复杂安装流程,接入电源即可快速开展作业,操作界面简洁易懂,新员工经过短期培训即可上手。运行稳定性高,故障发生率低,能持续支撑疾控检测工作,降低人员与高危样本接触风险。乌鲁木齐机械臂厂商汇像智能提供机械臂自动化工作站,助力食品、环境、疾控检测提质增效。

汇像科技实验室自动化机械臂,专为生命科学样本处理场景设计,可平稳完成移液、开盖、样本转运等高频操作,适配高校科研实验室日常作业需求。这款机械臂采用多关节柔性设计,机身紧凑不占空间,能在超净台、通风柜等狭小环境稳定运行,运行噪音低,不会干扰周边实验仪器与操作流程。搭配可视化编程界面,科研人员无需专业代码基础,即可自定义操作流程、调整运行轨迹,快速适配不同实验项目。设备支持长时间连续作业,可替代人工完成重复性劳作,减少人为操作带来的偏差,提升实验数据的连贯性与可复现性,助力高校实验室、研发机构稳步推进自动化升级。
汇像科技机械臂创新融合 AI 视觉引导技术,实现无示教、自适应复杂场景操作,解决传统机械臂依赖固定轨迹、无法应对样本位置偏移、形态变化的痛点。视觉模块搭载深度学习算法,可实时识别多孔板、离心管、培养瓶等耗材的位置、姿态与规格,自动校正机械臂运动轨迹,即便耗材摆放偏差、容器倾斜也能准确抓取。支持动态目标识别,可在移动输送线上完成样本抓取与转移,适配流水线式自动化产线。针对异形样本、柔性包装、易碎器皿,AI 视觉可实时规划抓取角度与力度,避免样本破损、试剂泄漏。该技术无需人工示教编程,新耗材、新场景只需上传样本图像即可快速适配,大幅缩短设备调试周期,让机械臂在实验室、产线的复杂多变环境中保持稳定高效运行,拓展自动化应用边界。汇像科技机械臂采用模块化快拆设计,支持液体处理、固体称量等多种末端工具一键切换,拓展应用边界。

汇像机械臂的主要特点包括:
1、轻量化设计:结构紧凑轻便,便于精确操控并增强使用安全性。
2、人机友好性:采用光滑平整的表面与关节设计,无尖锐边角或易导致夹伤的缝隙。
3、环境感知能力:能够探测周围环境状态,并基于实时感知信息自主调整运动与行为。
4、协作安全性:具备高灵敏度力反馈特性,在达到预设力阈值时可立即停止运行;经风险评估后,无需额外加装防护栏,实现人机高效协同作业。
5、简易编程操作:提供用户友好的编程界面,即使非专业背景的操作人员也能快速上手编程及调试任务。 汇像智能科技(上海)有限公司是一家专业提供机械臂的公司,有想法的可以来电咨询!银川机械臂供应商
汇像液体处理机械臂支持多通道并行操作,大幅缩短高通量筛选周期,助力生物医药企业加速研发进程。西安五轴 机械臂厂商
汇像科技机械臂硬件软件融入多重防护,保障设备、人员、样本安全,降低使用门槛。硬件配备关节限位、碰撞检测、急停按钮、安全围栏接口,遇异常立即停机,避免损伤;机身圆角设计,减少尖锐边角风险。软件设权限管理,按职责分配操作权限,防止误操作;内置操作指引与故障解决方案,便于快速处理问题。提供全流程培训与技术支持,从安装调试到日常维护,专业团队全程跟进。支持远程监控与故障诊断,技术人员可远程排查,缩短处理时间。安全易用的设计,让不同行业、不同水平用户轻松上手,加速自动化技术普及应用。西安五轴 机械臂厂商

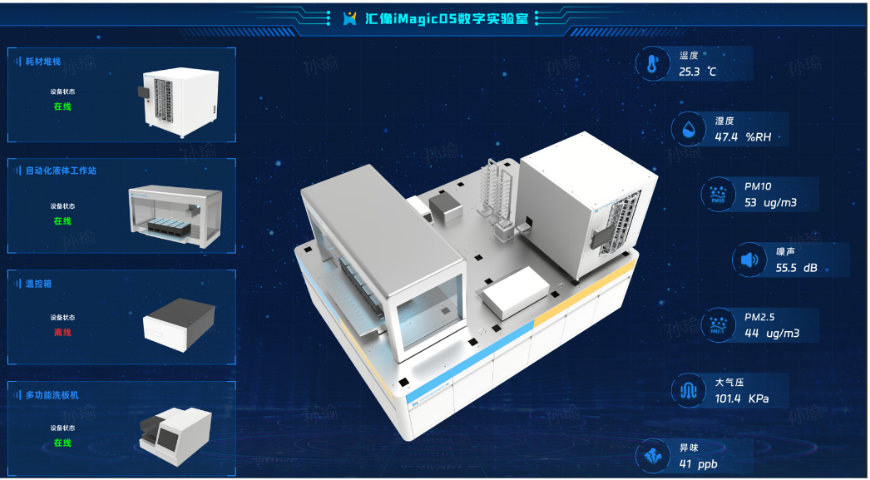
汇像机械臂自动化工作站以高精度协作臂为基础,整合样本处理、试剂管理、数据采集、设备控制于一体,提供开箱即用的实验室自动化方案。机械臂支持多任务并行与流程自定义,可完成称量、稀释、萃取、过滤、加样、孵育、检测等全链条操作,减少人工干预与误差。系统搭载 iMagicOS 智慧管控平台,实现任务调度、状态监控、日志追溯、数据上传一体化管理,兼容 LIMS 系统对接。适用于新药研发、疫苗生产、环境监测、食品药品安全检测、合成生物学等高通量场景,助力实验室从半自动向全自动、智能化升级。机械臂,就选汇像智能科技(上海)有限公司,用户的信赖之选,有想法可以来我司咨询!武汉机械臂供应商机械臂在食品、环境检测领...
- 淄博移动式机械臂夹爪 2026-06-26
- 深圳五轴 机械臂供应商 2026-06-22
- 呼和浩特五轴 机械臂定制 2026-06-20
- 苏州七轴 机械臂厂商 2026-06-20
- 大连 国产机械臂厂商 2026-06-19
- 吉林自动机械臂价格 2026-06-19
- 乌鲁木齐机械臂厂商 2026-06-18
- 宁波固定式机械臂设备制造厂家 2026-06-16
- 沈阳七轴 机械臂厂家 2026-06-16
- 湖州五轴 机械臂设备制造厂家 2026-06-15


- 无锡 国产机械臂价格 2026-06-14
- 沈阳移动式机械臂厂商 2026-06-14
- 自动机械臂供应商 2026-06-14
- 芜湖生物医学机械臂定制 2026-06-14
- 湖州三轴机械臂价格 2026-06-14
- 苏州七轴 机械臂设备制造厂家 2026-06-13





- 大连实验室移动机器人设备 07-15
- 太原自主移动机器人公司 07-15
- 西安自主移动机器人厂家 07-15
- 石家庄自主移动机器人公司 07-14
- 无锡协作机器人多少钱 07-14
- 长春数据智能实验室 07-14
- 沈阳智能协作机器人定制 07-14
- 乌鲁木齐数据智能实验室建设 07-14
- 人工智能实验平台 07-14
- 宁波实验室移动机器人机械臂 07-14