- 品牌
- 汇像
- 型号
- HelenX-5-P
- 加工定制
- 是
- 厂家
- 汇像
汇像HelenX-4S机械手凭借其操作便捷、功能强大、高度集成以及稳定可靠等诸多优势,成为了科研人员在实验室中的得力伙伴。它不*简化了实验操作流程,提高了实验效率和精细度,还为科研工作带来了更多的可能性。选择HelenX-3机械手,就是选择了更高效、更智能的科研方式,为实验室自动化注入新的活力,助力科研人员在探索未知的道路上迈出坚实的步伐,开启实验新征程。在实验室的微观世界里,每一个细微的操作都关乎着科研成果的诞生。传统的实验操作方式往往繁琐且耗时,而汇像HelenX-3机械手的出现,宛如一位神奇的魔法师,轻轻一挥魔杖,就能将复杂的实验流程变得简单高效,为实验室带来全新的活力。“智灵者” HelenX-4H,高效协作不脱节,实验室各环节衔接流畅无障碍。郑州三轴机械手厂家

在科研实验中,实验结果的准确性和可靠性至关重要。汇像HelenX-4L机械手以其稳定性和精细度,成为了实验结果的可靠保障。它采用了先进的运动控制技术和高精度的传感器,能够确保机械手在运动过程中的平稳性和定位的准确性。无论是进行微小样本的精细操作,还是搬运较重的实验器材,HelenX-3机械手都能游刃有余,误差控制在极小的范围内。而且,机械手在设计上充分考虑了长期使用的稳定性,经过严格的质量检测和耐久性测试,能够在长时间、高标准的实验环境下持续稳定运行,为科研人员提供始终如一的高质量操作,让科研人员对实验结果充满信心。吉林七轴机械手供应商选汇像机械手,轻松打破挑菌实验的操作困局。

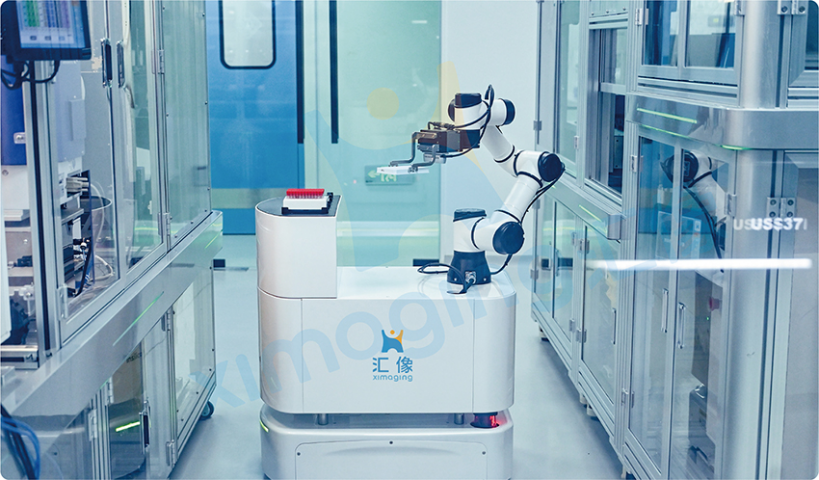
汇像HelenX-5S是一款智能桌面5轴协作机械手,可选配多种应用工具模块,特别适用于在紧凑空间中,完成人机协作场景下的高效执行任务。汇像HelenX-5S系统搭载了高性能嵌入式机械手控制器。该控制器提供高效的图形化编程模式和直观的拖拽示教功能,可快速生成精确可靠的运动轨迹。在实现高速执行的同时,汇像HelenX-5机械手有着高达±0.02mm的重复定位精度,可满足绝大多数应用的需求。内置安全防护功能,能够实现多级碰撞检测和安全监测。通过独特的五轴构型和内旋动力学解算模型,使得机械手可以实现360°全空间无死角大范围覆盖,同时在狭小紧凑的空间里进行高速障碍避让,与手系切换。
不同的实验场景、不同的样品容器,往往需要对机械手进行繁琐的调试,才能确保操作准确。但汇像HelenX-5S机械手在设计之初就充分考虑到了这一点,它的灵活样品容器抓手硬件工具包几乎涵盖了实验室常见的各类样品容器与耗材。无论是口径细小的微量离心管,还是形状特殊的试剂瓶,机械手都能自动识别并调整抓取力度和角度,无需科研人员手动更换抓手或进行复杂的参数调试。无论面对什么样的“工件”,都能轻松驾驭,让操作适配变得简单高效。化学实验室的 “安全卫士”:汇像机械手以智能防错体系筑牢实验防线。

汇像HelenX-4L是一款高性价比的桌面4轴协作机械手,可选配多种应用工具模块,特别适用于在紧凑空间中,完成人机协作场景下的高效执行任务。汇像HelenX-4L系统搭载了高性能嵌入式机械手控制器。该控制器提供高效的图形化编程模式和直观的拖拽示教功能,可快速生成精确可靠的运动轨迹。内置安全防护功能,能够实现多级碰撞检测和安全监测。高通用性,适用汇像所有型号机械臂浏览器网页,支持多客户端平台可视化点位,助力“看得见摸得着”的现场实施。“智灵者” HelenX-5S,小空间作业,精确执行每一步,实验零误差。沈阳机械手品牌
汇像机械手内置摄像头,远程监控避免人为误差。郑州三轴机械手厂家
不同的实验项目有着各自独特的操作流程和需求。HelenX-4H机械手充分考虑到这一点,具备强大且灵活的编程功能。科研人员可以根据实验的具体要求,自由编写机械手的动作程序。无论是简单的样品抓取、转移,还是复杂的多步骤实验操作,如系列化学反应中的试剂添加、混合等,HelenX-3机械手都能精细执行。其编程过程简单易懂,采用了图形化编程界面,科研人员只需像搭建积木一样,将各种预设的动作模块进行组合、编辑,就能快速生成符合实验需求的操作程序,真正实现了“所想即所得”,为多样化的实验提供了高度适配的解决方案。郑州三轴机械手厂家

汇像科技机械手聚焦实验室精细化作业场景,依托成熟的运动控制技术,可平稳完成样本转运、试剂移取、仪器对接等常规操作,缓解科研人员重复劳作压力。这款机械手采用轻量化关节设计,机身占用空间小,既能适配常规实验台,也能在超净工作台、通风柜等狭小空间内开展作业,适应不同实验室的布局特点。设备运行过程噪音低、动作平缓,不会对周边实验仪器、样本环境造成干扰,可与酶标仪、培养箱、离心机等主流实验设备协同作业。用户可通过可视化编程界面自定义操作步骤,调整运行轨迹与停顿时长,无需复杂代码知识即可完成流程搭建,适合高校科研、企业研发、检测机构等各类实验室引入使用,助力优化实验操作连贯性。汇像智能科技(上海)有限公司...
- 贵阳机械手供应商 2026-06-24
- 三亚工业机械手 2026-06-24
- 济南智能机械手 2026-06-23
- 广州机械手厂商 2026-06-22
- 东莞实验室机械手厂商 2026-06-22
- 包头移动式机械手设备制造厂家 2026-06-20
- 大同五轴机械手系统 2026-06-18
- 无锡自动机械手多少钱 2026-06-17
- 长春自动机械手厂家 2026-06-17
- 合肥五轴机械手品牌 2026-06-16

- 三亚移动式机械手厂家 2026-06-12
- 吉林固定式机械手品牌 2026-06-12
- 珠海五轴机械手多少钱 2026-06-12
- 哈尔滨固定式机械手多少钱 2026-06-10
- 南宁生物医学机械手供应商 2026-06-09
- 成都五轴机械手价格 2026-06-08

- 烟台智能机械手系统 06-29
- 成都6轴移动机器人价格 06-28
- 南昌实验室移动机器人机械臂 06-28
- 南宁七轴 协作机器人夹爪 06-28
- 智能体积测量仪品牌 06-28
- 珠海AGV移动机器人公司 06-28
- 宁波实验室移动机器人供应商 06-28
- 太原6轴移动机器人 06-28
- 宁波实验室移动机器人厂商 06-28
- 哈尔滨4轴移动机器人机械臂 06-27