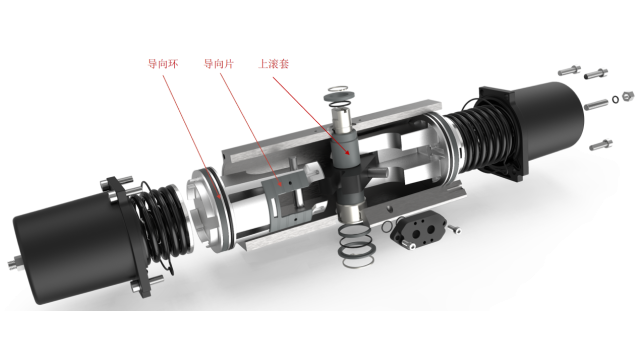
建立完善的备件和维保管理制度,储备一些常用的易损备件,如密封件、限位开关、弹簧等,以便在执行器出现故障时能够及时更换,减少停机时间。定期检查备件的库存情况,及时补充和更新备件,确保备件的质量和可用性。同时,对气动拨叉式执行机构的维护和保养工作进行详细记录,包括维护时间、维护内容、更换的部件、发现的问题及处理结果等。建立维保档案,以便对执行器的运行状况和维护历史进行跟踪和分析,为后续的维护保养工作提供参考依据,也有助于及时发现潜在的问题和故障隐患,提前采取预防措施。拨叉式气动执行机构体积小,重量轻、便于安装。核电智能执行机构原理

拨叉式气动执行机构在石油化工行业的应用:在石油化工生产中,大量使用各种阀门来控制流体的输送和工艺流程。气动拨叉式执行机构可用于驱动球阀、蝶阀等阀门,实现对石油、天然气、化工原料等介质的精确控制,确保生产过程的安全、稳定和高效运行。例如,在炼油厂的油品输送管道上,可安装气动拨叉式执行机构驱动的球阀,用于控制油品的流向和流量;在化工装置的反应器、分离器等设备上,蝶阀与气动拨叉式执行器配合使用,可调节工艺介质的进出料。核电气动执行器模块作为自动化控制系统的一部分,拨叉式气动执行机构的可靠性和稳定性直接关系到整个系统的效率。
电动执行机构是一种通过电信号驱动阀门或调节装置的自动化控制设备,其工作原理可概括为以下闭环控制流程:信号输入与比较:接收控制系统发出的标准电信号(如4-20mA、0-10V或数字信号),通过伺服放大器或智能控制模块将输入信号与位置反馈信号进行对比,生成偏差信号。驱动与动力转换:偏差信号经放大后驱动两相伺服电机或三相异步电机,通过齿轮组、蜗轮蜗杆等减速机构将电机的高转速(约1500r/min)转换为低转速(如0.5-1.5r/min),同时输出扭矩提升至数百至数万牛米,满足大尺寸阀门需求。位置反馈与闭环调节:执行机构内置导电塑料电位器、差动变压器或编码器,将输出轴位移/转角转化为4-20mA反馈信号,形成闭环控制,精度可达±0.5%。部分智能型号还集成PID算法,实现自适应调节。安全保护机制:配备双重限位(机械+电气)和力矩过载保护,当行程达到设定值或负载超限时,触发微动开关切断电源,避免设备损坏。
未来电动执行机构将加速向伺服驱动与智能控制方向转型,通过集成高精度传感器(如霍尔效应传感器、光电编码器)和自适应算法,实现力矩、位移、速度的闭环控制。例如,基于边缘计算的实时数据处理能力可提升执行机构的自诊断功能,预测齿轮磨损、电机过热等潜在故障。同时,智能型产品将深度融合工业物联网(IIoT)协议,支持Modbus TCP、OPC UA等通信标准,实现与PLC、DCS系统的无缝对接,形成设备状态监测-远程参数优化-预测性维护的闭环管理体系。在选购电动执行机构时,了解产品的防护等级是非常必要的,这直接影响到其适用范围。

伺服放大器作为电动执行机构的关键控制单元,具体工作流程可分为三个关键阶段:信号综合与偏差检测:系统接收来自DCS或调节器的标准信号(4-20mA DC)后,前置磁放大器将输入信号与执行机构的位置反馈信号进行综合比较。磁放大器内部采用四组坡莫合金环结构,通过偏移绕组和反馈绕组实现信号叠加,产生与偏差成比例的电压信号。功率放大与驱动控制:当检测到偏差时,触发电路将偏差信号转换为晶闸管的触发脉冲。正偏差触发固态继电器导通,驱动电机正转;负偏差则触发反向回路,电机反转。新型伺服放大器采用过零触发固态继电器技术,既能输出高达150VA的驱动功率,又避免了电网污染。闭环动态调节:执行机构动作时,位置发送器实时将阀位转换为电阻或电流信号反馈至输入端。当反馈信号与输入信号的差值小于死区阈值(通常±1%)时,触发电路停止输出,电机进入制动状态。这种PID调节机制可使定位精度达到±0.5% FS,重复误差不超过±0.1%。拨叉式气动执行机构相对于同扭矩齿轮齿条式气动执行机构,缸体更小,开关反应速度更快。核电智能执行机构原理
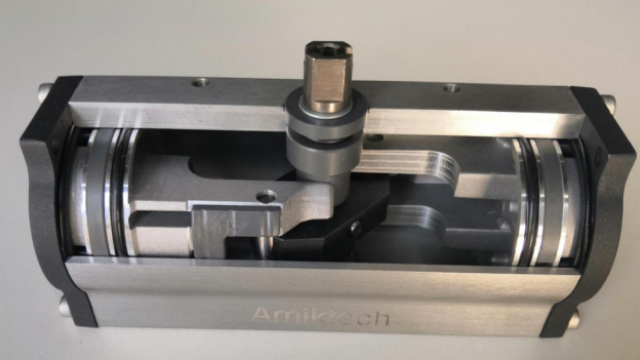
拨叉式气动执行机构传动配合精密,调节精度更高。核电智能执行机构原理
电动执行机构扭矩/推力是一个极为重要的参数。在不同的工业应用场景中,阀门类型多种多样,像常见的球阀和闸阀。阀门的工作过程中,会承受一定的压差,这个压差会对阀门的正常操作产生影响。例如,对于150Ib球阀来说,它需要承受1.89MPa的压差。在实际计算所需扭矩时,不能只依据这个压差数值,还需要考虑到安全因素。为了确保执行机构在运行过程中不会出现过载现象,我们通常需要将计算得到的扭矩乘以1.5倍的安全系数。这样,执行器输出的扭矩就必须大于根据压差计算出来的值。这就好比一辆汽车在爬坡时,发动机需要提供足够的动力,这个动力要能够克服车辆自身的重力和坡面的摩擦力,还要预留一些余量,以应对可能出现的突发状况,如路面的颠簸或者突然增加的阻力。核电智能执行机构原理