伺服放大器作为电动执行机构的关键控制单元,具体工作流程可分为三个关键阶段:信号综合与偏差检测:系统接收来自DCS或调节器的标准信号(4-20mA DC)后,前置磁放大器将输入信号与执行机构的位置反馈信号进行综合比较。磁放大器内部采用四组坡莫合金环结构,通过偏移绕组和反馈绕组实现信号叠加,产生与偏差成比例的电压信号。功率放大与驱动控制:当检测到偏差时,触发电路将偏差信号转换为晶闸管的触发脉冲。正偏差触发固态继电器导通,驱动电机正转;负偏差则触发反向回路,电机反转。新型伺服放大器采用过零触发固态继电器技术,既能输出高达150VA的驱动功率,又避免了电网污染。闭环动态调节:执行机构动作时,位置发送器实时将阀位转换为电阻或电流信号反馈至输入端。当反馈信号与输入信号的差值小于死区阈值(通常±1%)时,触发电路停止输出,电机进入制动状态。这种PID调节机制可使定位精度达到±0.5% FS,重复误差不超过±0.1%。拨叉式气动执行机构体积小,重量轻、便于安装。石化分体式执行器技术
电动执行机构的选型流程中的合规性检查环节。确保电动执行机构符合行业标准(如GB/T 24923)以及防爆认证要求是至关重要的。行业标准规定了电动执行机构在性能、质量、安全等方面的基本要求,如果不符合这些标准,可能会导致阀门卡阻或者执行器烧毁等问题。例如,在一个按照GB/T 24923标准设计的工业流体控制系统中,如果使用了不符合该标准的电动执行机构,可能会出现执行机构输出扭矩不足,无法正常驱动阀门,从而导致阀门卡阻在某个位置,影响整个系统的流体传输;或者由于执行机构的电气性能不符合标准,在工作过程中出现过载现象,会导致执行器烧毁,造成整个系统的瘫痪。进口执行机构控制器随着技术的发展,无线通信功能逐渐成为前端电动执行机构的配置之一。
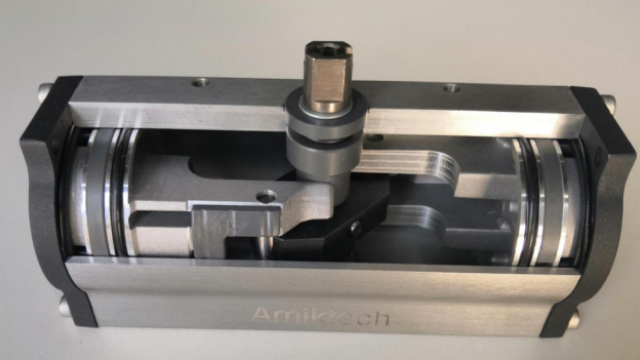
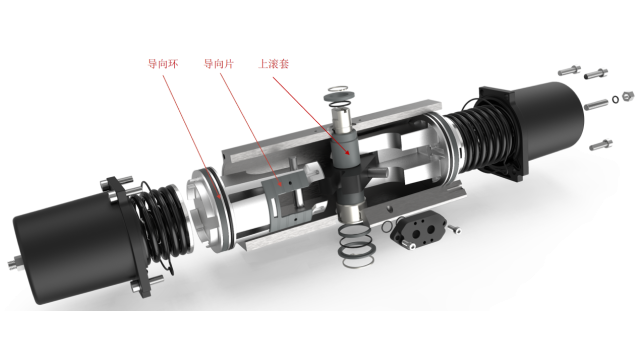
拨叉式气动执行机构的工作原理是压缩空气进入气缸,推动拨叉式的活塞运动,通过拨叉盘将活塞的直线运动转为圆盘的旋转运动,圆盘再带动输出轴转动,从而实现对阀门的开关控制。拨叉盘的运动方式是旋转运动。圆盘与拨叉、传动销与圆盘均通过销连接,圆盘尺寸可以趋近缸径,拨叉与圆盘连接的销接近圆盘边缘,因而能以较小的尺寸获得较大的扭矩。同时,圆盘的结构独特,其与销连接处有特殊曲线式设计,旋转时的扭矩特性与蝶阀、球阀启闭所需扭矩特性相符。
电源与控制信号也是电动执行机构的关键技术参数。在不同的工业环境中,支持的电压类型有所不同,常见的有AC220V、AC380V或者DC24V。这些电压类型的选择取决于具体的使用场景和设备要求。而输入信号范围同样有着严格的规定,例如4 - 20mA、0 - 5V等。这就像不同的语言一样,执行机构需要能够准确识别这些信号,才能做出正确的动作。同时,反馈信号也有着相应的要求。反馈信号就像是执行机构给控制系统的回应,告诉系统自己是否按照指令准确地执行了操作,以便系统能够及时调整指令或者做出其他决策。除了常规的动力供应外,某些电动执行机构还可以接受太阳能供电,进一步拓展应用场景。

在水处理厂和供水系统中,各种阀门的准确控制是保证水质和水量的关键。例如蝶阀和闸阀,它们在水流的控制中起着不可或缺的作用。电动执行机构就像是这些阀门的智能控制器,负责它们的启闭以及流量调节。在污水处理环节,情况更为复杂。污水处理是一个多步骤的过程,包括过滤、消毒等多个工序,每个工序都需要精确的控制才能确保处理后的水质达到排放标准。电动执行机构在这里通过与传感器的联动实现了水质参数的动态调节。传感器可以实时监测水质的各种参数,如酸碱度、溶解氧等,然后将这些数据反馈给控制系统,控制系统根据预设的标准,通过电动执行机构对相关阀门进行调节。这样的自动化运行方式,不*提高了污水处理的效率,还能根据污水的实际情况进行灵活调整,确保处理效果的稳定性。电动执行机构内部的关键组件包括电动机、减速器以及限位开关等。石化执行机构原理
相较于传统的手动或液压驱动方式,拨叉式气动执行机构提供了更为清洁环保的选择。石化分体式执行器技术
建立完善的备件和维保管理制度,储备一些常用的易损备件,如密封件、限位开关、弹簧等,以便在执行器出现故障时能够及时更换,减少停机时间。定期检查备件的库存情况,及时补充和更新备件,确保备件的质量和可用性。同时,对气动拨叉式执行机构的维护和保养工作进行详细记录,包括维护时间、维护内容、更换的部件、发现的问题及处理结果等。建立维保档案,以便对执行器的运行状况和维护历史进行跟踪和分析,为后续的维护保养工作提供参考依据,也有助于及时发现潜在的问题和故障隐患,提前采取预防措施。石化分体式执行器技术


