MIMO振动器Spider-80M基于流行的Spider-80Xi机架构建,主要应用于MIMO振动和MIMO结构测试,支持单轴及三轴六自由度振动台。在一个Spider-80M多轴器硬件机箱中,总要安装一个带有8个输入和8个输出的主模块,这个主模块在机箱中占用两个插槽空间。可以装入**多6个额外的Spider-80Xi前端模块,形成一个具有8个输出和56个输入的系统。多个Spider-80M多输入多输出器或Spider-80Xi高通道振动测试系统可以链接在一起,形成一个非常大的系统,拥有高达504个输入通道,全部同时采样。 Spider-80X,16通道振动控制器。黑龙江16通道控制仪
锐达振动测试系统中的多正弦测试允许在高达46千赫的频率范围内,多个**的正弦信号同时扫频。相比普通的VCS正弦扫频,多正弦测试**提高了长时间扫描和驻留测试的效率。由于测试部件将在各种频率下产生谐振,因此正弦扫频通常用于确保频率范围内所有谐振的激励;但是在整个频率范围内正弦频带扫频可能非常耗时。这种新的多正弦功能包括使用在频率范围内同时扫描的多个正弦频带(**多10个)来激发所有共振。该技术是它**减少了测试时间。多正弦可以同时扫描多个正弦频带,并确保可以激发结构的多个共振频率。通过多次正弦激励,可以显着减少正弦测试所需的持续时间。**的滤波器分别应用于每个频带。 吉林振动台控制厂家使用CoCo80设备状态监测仪器对风力发电机组无线远程监控。
CoCo-80X能够准确地测量和记录动态和静态信号。SD卡同时记录和存储8个通道的数据,这些数据在执行实时频率和时间域计算时达。嵌入式信号源的通道提供了多个与输入采样率同步标准波形。在数据采集过程中转速表可以测量转速。信号源和转速表共用一个LEMO连接器。内置WIFI功能,PC链接设备后,通过CoCoEDM软件直接下载采集的数据。CAN总线(ISO11898-1&2)的数字输入允许同步测量汽车的速度,发动机转速和/或任意的数百种性能变量通过其区域网络(CAN)。只需简单的将汽车的SAEJ1962依次的插入汽车的车载诊断(OBDII)连接器就可以添加额外的时间信号到您的量程里了。内置GPS功能,记录汽车行驶轨迹。
冲击响应谱(SRS)是一个瞬态加速度脉冲可能对结构造成破坏的图示。它绘制了一组单自由度(SDOF)弹簧的峰值加速度响应,就像在刚性无质量的基础上一样,质量阻尼器系统都经历相同的基本激励。每个SDOF系统具有不同的固有频率;它们都有相同的粘滞阻尼因子。频谱的结果是在固有频率(水平方向)上绘制峰值加速度(垂直)得出的。一个SRS是由一个冲击波产生,使用以下过程:SRS的阻尼比(5%是最常见的)使用数字滤波器模拟频率单自由度、fn和阻尼ξ。应用瞬态作为输入,计算响应加速度波形。保留在脉冲持续时间和之后的峰值正负响应。选择其中一个极值,并将其绘制成fn的频谱振幅。对每个(对数间隔)fn重复这些步骤。由此产生的峰值加速度与弹簧-质量阻尼系统固有频率的曲线称为冲击响应谱,简称SRS。发动机转速测试分析。

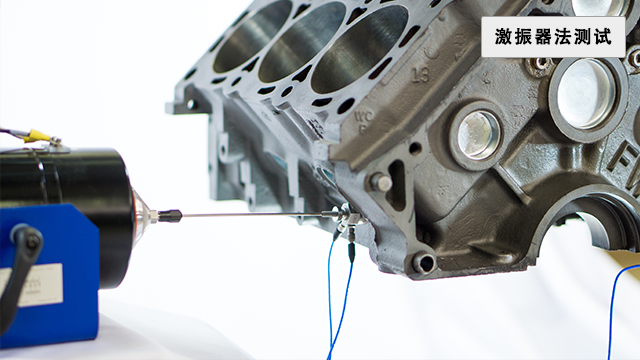
在结构疲劳测试中,有时需要对结构在共振频率点处振动一段时间。EDM的正弦测试中包含了搜索和共振峰的功能。本节介绍如何实现这种测试–共振搜索和驻留(RSTD)。当系统处于强迫状态时,其峰值位移、速度和加速度响应会发生轻微不同的强迫频率。共振频率被定义为响应到达局部**大值的频率。这些共振是:位移共振频率速度共振频率加速度共振频率对于阻尼比小于,三种共振频率之间的差异可以忽略不计。寻找共振的直接方法是测量力激励信号与结构响应信号(加速度、速度或位移)之间的传递函数。共振将被看作是传递函数曲线上的峰值。不幸的是,这种方法在许多振动台测试中是不实用的,因为力测量不容易获得。相反,传递性测量通常被用来寻找共振。加速度传输测量是根据两个加速度计的响应计算的,一个在振动台上,另一个在测试的结构上。传递性被定义为两点之间响应的比率。响应加速计可能不止有一个,并且会针对每个响应加速度计计算传递函数。为这些参考和响应加速计选择合适的安装位置至关重要。错误的位置可能会让你找不到到一些共振点。同样,如果响应和参考通道放置反了,则**振将显示为共振。参考通道的加速度计应该安装在振动台上能精确记录基本运动的位置处。 小卫星使用Spider振动控制器与振动台进行振动测试实验。青海32通道控制仪
机器故障诊断系统VDS。黑龙江16通道控制仪
Spider随机测试模式中的峭度用于随机振动的振幅分布。峭度,测试可以更好的模拟现实世界的环境。在现实世界中的许多振动的环境中,信号都具有高峭度值的特征(相对于高斯随机)。这些环境中的振动疲劳和损坏力比纯高斯随机信号高。因此,采用传统的高斯随机信号作为测试信号实际上只能在产品的服务环境中进行测试。峭度可以用一个标准化的K值表示,这个值是由第四统计矩除以第二统计矩的平方得来。下面的等式为N个采样点时的K值计算。 黑龙江16通道控制仪