堆垛机的行走驱动装置工作原理动力传输:行走驱动装置通常由电机作为动力源。电机启动后,通过联轴器或皮带等传动方式将动力传递给减速器。减速器的作用是降低电机的转速,同时增大扭矩,以满足堆垛机行走所需的动力要求。例如,在一个大型自动化仓库中,堆垛机需要在承载较重货物的情况下稳定地在巷道内移动,经过减速器后的扭矩能够使车轮有足够的力量驱动堆垛机前进。从减速器输出的动力再通过传动轴或直接连接等方式传递到车轮。车轮一般是安装在堆垛机底部的行走轮,与铺设在巷道地面的轨道相配合。车轮的材质和结构设计要考虑到承载能力、耐磨性和与轨道的适配性等因素。比如,行走轮通常采用强度合金钢制造,表面经过淬火等热处理工艺,以提高其硬度和耐磨性,确保在长期运行过程中能够与轨道良好接触并稳定运行。通过堆垛机的自动化操作,有助于减少库存误差,提高库存周转率,并优化库存成本。甘肃巷道堆垛机结构

堆垛机的升降驱动装置工作原理不同驱动方式:钢丝绳卷扬式:电机驱动卷筒旋转,卷筒上缠绕着钢丝绳。钢丝绳的一端固定在卷筒上,另一端连接载货台。当电机正转时,卷筒顺时针旋转,放出钢丝绳,载货台下降;当电机反转时,卷筒逆时针旋转,收起钢丝绳,载货台上升。在这个过程中,需要通过张力传感器等设备来监测钢丝绳的张力,因为如果张力过大,可能会导致钢丝绳断裂;张力过小,则可能会使载货台在升降过程中出现晃动。例如,在一些高速堆垛机中,为了保证载货台的平稳升降,会采用双卷筒双绳的结构,通过平衡两根钢丝绳的张力来提高载货台的稳定性。链条式:通过电机驱动链轮,链条与链轮相啮合,链条的一端连接载货台。当电机带动链轮转动时,链条就会带动载货台上升或下降。链条式驱动方式相对简单,成本较低,但承载能力和升降速度可能不如钢丝绳卷扬式。不过在一些小型或对升降速度要求不高的堆垛机中应用较为频繁。在链条式驱动中,同样需要注意链条的张紧程度,一般会设置张紧装置来调整链条的松紧,以确保传动的可靠性。网络营销巷道堆垛机市价堆垛机通过计算机控制下的三维运动(水平行走、垂直升降、货叉伸缩)以及精确的控制系统和安全保护装置。
单伸位堆垛机与双伸位堆垛机的区别作业效率和灵活性单伸位堆垛机:作业效率相对较为稳定,在存取单一侧面的货物时,由于其结构简单,动作较为直接,运行速度可以相对较快。但是如果需要频繁更换存取货物的货架侧面(例如由于货物出入库的位置分布变化),单伸位堆垛机就需要花费更多的时间在通道中运行调整位置。它比较适合货物出入库位置相对固定,且对存储密度要求不是特别高的仓库环境。双伸位堆垛机:具有更高的灵活性,能够根据仓库管理系统的指令,快速地从货架的两侧进行货物存取。不过,双伸位货叉的结构相对复杂,每次操作货叉的伸缩时间可能会比单伸位货叉略长,而且双伸位堆垛机的控制系统也更为复杂,在进行一些复杂的货物存取任务时,可能需要更多的时间来规划路径和操作货叉。但是总体而言,在处理不同出入库任务的综合效率上,双伸位堆垛机在合适的场景下更具优势。
堆垛机结构主要有:水平行走结构、提升机构、取放货机构、电气柜和蓄电池等部分组成。堆垛机本体具有足够的刚度和强度,整个结构部分布局紧凑、强度高、刚性好。升机构用于驱动载货台做升降运动。提升机构主要由提升减速电机、立柱、上横梁、同步带、缓冲器、载货台等部分组成见下图。提升电机减速器机构通过支架用螺栓固定在立柱下端的下横梁上,减速器输出轴驱动同步带运动,从而带动载货台上下垂直运动。上横梁下方设有一组聚氨酯缓冲器,用于减小载货台在相对高位置对上横梁的冲击,下横梁上方也设有一组聚氨酯缓冲器,用于减小载货台在相对低位置对下横梁的冲击。堆垛机在设计和制造过程中注重稳定性和可靠性,能够在各种环境下稳定运行。

双伸位堆垛机的应用场景大型物流仓库:在大型物流配送中心,货物的存储量和出入库频率都很高。双伸位堆垛机可以充分利用货架的空间,在同一货架巷道内存取两个方向的货物,很大程度提高了仓库的空间利用率和货物的存取效率。例如,对于存储电商包裹的仓库,双伸位堆垛机可以在货架的正面和背面分别存储不同类别的商品,当有订单时能够快速地从两个方向取出货物进行分拣和发货。自动化立体仓库:在自动化程度较高的立体仓库中,双伸位堆垛机是实现高效仓储的关键设备。它与自动化输送系统、仓库管理系统等配合,能够处理各种类型的货物。比如在汽车零部件自动化仓库,双伸位堆垛机可以存储不同型号的零部件,同时满足生产线上对零部件的快速供应需求,提高了整个生产系统的效率。立柱和横梁构成了堆垛机的主体框架。成品巷道堆垛机
堆垛机控制系统通过触摸屏操作代替了传统的操作按钮和选择开关,提高操作的便捷性和直观性。甘肃巷道堆垛机结构
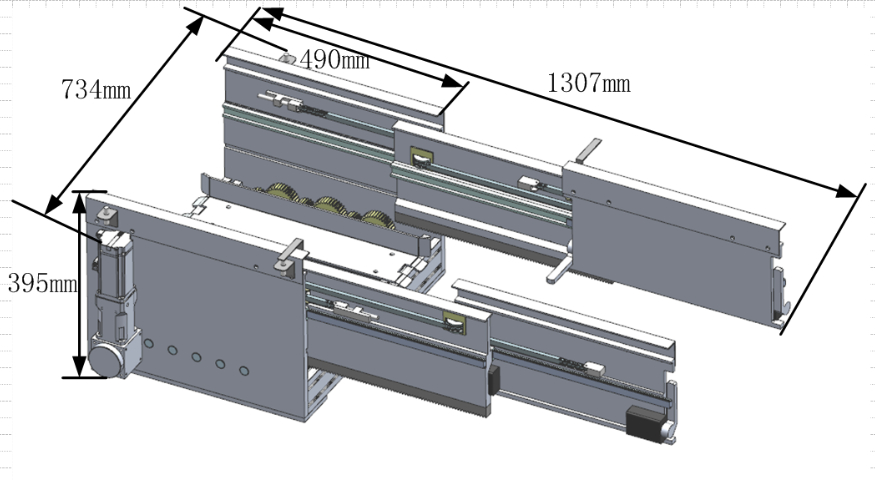
堆垛机结构主要有:水平行走结构、提升机构、取放货机构、电气柜和蓄电池等部分组成。堆垛机本体具有足够的刚度和强度,整个结构部分布局紧凑、强度高、刚性好。取放货机构左右两块定板通过载物台连接并安装在横梁上,左右方向的定板、中板和外板通过伸缩导轨依次连接在一起。安装在定板上的传动组件带动中板进行前后方向滑动,同时外板通过传动链1及传动链与中板进行同步随动。拨叉组由安装在左右外板上的四个拨叉组成,即前拨叉组和后拨叉组,前后拨叉组依据取放机构在不同的工作状态时,自动切换相应的位置(水平或垂直状态)。限位开关用于限制外板前后伸缩时的极限距离。甘肃巷道堆垛机结构