为何要使用码垛机器人?1.可加快生产过程中的自动化程度,使用码垛机器人即可部分或全将代替人工完成作业,加快实现工业机械化和自动化的步伐。2.机械手能持久、耐劳,可以把人从繁重单调的劳动中解放出来,并能扩大和延伸人的功能,加快劳动生产率。3.机械手通用性、灵巧美观,动作准确,能较好的适应产品品种的不断变化,以提供柔性生产的需要。4.码垛机器人的诞生代替了大量工人,使其成为大中小企业流水线的重要组成部分,随着科技的发展,码垛机器人作为工业机器人的典型表示,也标志着机械代替手工成为未来发展的趋势。在图书馆,AGV机器人用于书籍自动归位,提高管理效率。杭州机器人技术

AGV搬运机器人如何提升物流效率?在传统的物流模式中,人工搬运往往存在效率低、成本高、安全风险大等问题。而AGV搬运机器人恰恰能够解决这些问题,带来明显的效率提升和成本优化。24小时不间断运行,AGV搬运机器人可以24小时连续工作,不需要休息。对于需求量大、时间紧迫的生产环境来说,这意味着可以大幅缩短运输周期,提高整体生产效率。精确的物料搬运:AGV搬运机器人依赖于精确的导航和控制系统,不会出现传统人工搬运时可能发生的错放、漏发等情况。它们能够按照任务需求精确将物料搬运到指定位置,避免了人为错误导致的生产延误和成本增加。杭州机器人技术AGV 机器人运行平稳,减少货物搬运过程中的磕碰损坏。
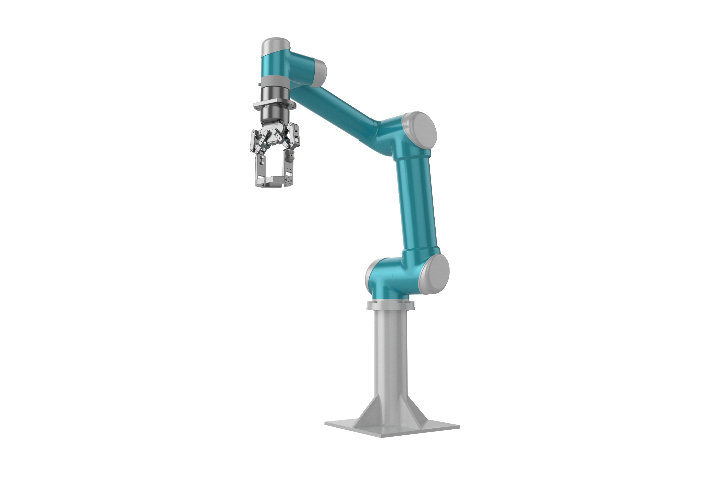
六轴机器人各个轴有什么作用?一般来说,六轴机器人各个轴的作用主要有以下方面:头一轴:是链接底盘的位置,也是承重和主要位置,它承载着整个机器人的重量和机器人左右水平的大幅度摆动。第二轴:主要是控制机器人前后摆动、伸缩的重要一轴。第三轴:三轴也是控制机器人前后摆动的一轴,不过摆动幅度比第二轴要小很多,不过这也是根据六轴机器人臂展长决定。第四轴:四轴是控制上臂部分180°自由旋转的一轴,相当于人的小臂。第五轴:第五轴很重要,当你差不多调好位置后,精确定位到产品上,就要用到第五轴,相当于人手腕部分。第六轴:当第五轴定位到产品上之后,需要一些微小的改动,就需要用到第六轴,第六轴相当于可以水平360°旋转的一个转盘。可以更精确定位到产品。
AGV目前具体的应用形式主要包括:形成柔性生产线,AGV机器人具有很好的柔性,AGV机器人完成一道工序就可以进行下一道工序,具有很高的灵活性。AGV机器人承担工件的工序转换,几个台AGV机器人形成柔性生产线,实现AGV随着生产过程的调整,也可以调整搬运路线。AGV机器人主要分为潜伏式机器人、背负式、牵引式、滚筒、全向横移等。,用户可以根据货物的大小和现场环境、工作频繁、选择额定重量。激光导航AGV除支持多场景智能物料传输功能外,还提供多种安全保护机制。例如,多传感器感知环境技术应对复杂环境AGV现场人员的安全要求;同时,产品采用声光报警、防撞触边、多重设计急停按钮,确保生产安全。AGV机器人广泛应用于汽车制造,实现零部件自动配送。

工作原理:三坐标机器人通过探针在X、Y、Z轴上的移动来接触被测物体,测量系统记录探头的位移量并计算坐标。具体过程如下:坐标系建立:通常采用右手直角坐标系,由X、Y、Z三个轴组成。通过选择一个平滑且稳定的平面作为基准面,设定测量零点,确定测量范围和分辨率。探测系统:包括探针、传感器和图像识别技术。探针用于接触被测物体并获取数据,传感器将信号转化为电信号,图像识别技术对数据进行处理和分析。数据处理:通过计算机程序控制机械臂的移动,实现自动化测量。采集到的数据经过滤波、插值等处理,提高测量精度。自动导引小车式 AGV 机器人,常用于短距离、高频次物料运输。杭州机器人技术
在实验室,AGV机器人用于样品自动传递,减少人为误差。杭州机器人技术
AGV的工作原理:AGV的工作原理主要依赖于先进的导航技术和自动化控制系统。常见的导航方式包括磁条引导、激光引导、RFID(无线射频识别)引导等。在磁条引导方式中,AGV通过识别地面铺设的磁条来确定行驶路径;激光引导则利用激光反射器和传感器来构建环境地图,实现自主导航;RFID引导则是通过读取地面或货物上的RFID标签来获取信息,进行定位和导航。同时,AGV还配备了多种传感器,如避障传感器、超声波传感器等,以确保行驶过程中的安全性和稳定性。杭州机器人技术