- 品牌
- hictrl
- 型号
- OMV
在实际应用中,选择合适的麦克纳姆轮需要关注多个关键技术参数,这些参数直接决定了车轮的性能、适用场景与使用寿命。对于工程师、采购人员或技术爱好者来说,理解这些参数是确保设备稳定运行的基础。首先是 “尺寸参数”,包括车轮直径、宽度与辊子规格。车轮直径通常从 100mm 到 500mm 不等,小直径车轮(如 100-200mm)适合轻型设备(如服务机器人、小型 AGV),优点是灵活性高、占用空间小;大直径车轮(如 300-500mm)则适用于重型设备(如工业拖车、重型 AGV),可提升承重能力与越障性能(如跨越地面缝隙、小凸起)。车轮宽度与接触地面的稳定性相关,宽度越大,设备在横移时的抗倾覆能力越强;而辊子的数量与尺寸则影响车轮的抓地力 —— 辊子数量越多,与地面的接触点越密集,行驶时越平稳,不易打滑。其次是 “承重能力”,这是选型的指标之一。麦克纳姆轮的承重通常以 “单轮额定载重” 标注,范围从几十公斤到数吨不等(如轻型轮承重 50-200kg,重型轮承重 1-5 吨)。在选型时,需根据设备总重量(含负载)均匀分配到四个车轮上,且预留 20%-30% 的安全余量 —— 例如,一台总重 800kg 的 AGV,应选择单轮承重不低于 250kg(800kg÷4+30% 余量)的麦克纳姆轮,避免因过载导致辊子变形。麦克纳姆轮重载AGV的价格范围?进口麦克纳姆轮大小

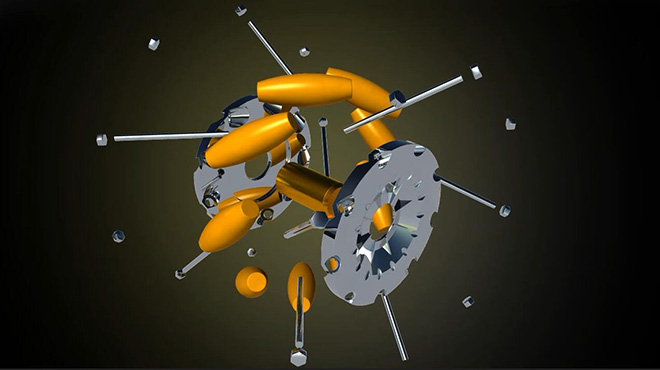
瑞典工程师本特·伊隆发明的麦克纳姆轮,彻底打破了传统轮式移动的方向桎梏。其奥秘在于轮辋外周均匀分布的45°斜向辊子,这些可自由转动的小轮能将主轮旋转力分解为纵横两个分力,通过四组轮体的协同控制,轻松实现前行、横移、斜向行进及360°零半径旋转等复合运动。相较于传统轮系,麦克纳姆轮无需复杂转向机构,在狭窄空间内的灵活性无可替代。搭配高精度编码器与智能控制算法,它可实现毫米级定位,既满足精密制造的严苛要求,也为自动化装备提供了“空间自由”的支撑,成为全向移动技术的经典范式。 使用麦克纳姆轮规格麦克纳姆轮重载AGV的维护保养指南?

麦克纳姆轮优势在于其无死角的全向移动能力,这一特性彻底改变了传统轮式车辆的运动逻辑。传统车轮只能沿轴线方向移动,转向时需要一定的转弯半径,而麦克纳姆轮通过四轮协同控制,可实现 “平移 + 旋转” 的复合运动:横向平移时,两侧车轮反向转动,利用侧向分力推动车身平行移动;原地旋转时,对角车轮同向转动,形成扭矩带动车身 360° 旋转;斜向移动则通过调整各车轮转速,使合力方向与车身呈 45° 角。这种灵活的运动模式,让车辆在狭窄空间内无需多次调整方向,即可完成定位和路径规划。此外,麦克纳姆轮还具备承载能力强、运行稳定的优势。其辊子与地面为点接触,分布均匀的接触点可分散车身重量,避免局部压力过大导致的磨损;聚氨酯材质的辊子具有良好的弹性和耐磨性,既能适应不同地面条件,又能降低运行时的噪音;轮毂的一体化设计则提升了结构强度,可满足工业设备、机器人等场景的重载需求。与履带式移动机构相比,麦克纳姆轮运行阻力更小、能耗更低;与全向轮相比,其承载能力更强、稳定性更高,因此在多种场景中成为全向移动的方案。
服务机器人静音麦克纳姆轮:针对商场、医院、办公楼等对噪音敏感的服务场景,研发的静音型麦克纳姆轮采用特殊降噪橡胶材质与镂空轮毂结构,运行噪音低至 55 分贝以下,相当于正常交谈音量。轮径 80-150mm 的紧凑设计,适配各类中小型服务机器人,支持 1.5m/s 移动速度与 300kg 承载量。内置防滑纹路与减震缓冲层,能轻松应对地砖接缝、轻微凸起等地面障碍,配合机器人导航系统可实现避障与路径规划,广泛应用于导购机器人、送餐机器人、医疗物资配送机器人等领域,为用户提供安静、平稳的服务体验。麦克纳姆轮重载AGV技术升级方向是什么?

麦克纳姆轮的应用范围广泛,从工业机器人、自动引导车(AGV)到医疗机器人、科研设备,再到太空探测器、装备以及物流和仓储领域,都能看到它的身影。在工业机器人领域,麦克纳姆轮使机器人能够在狭小空间内进行精确作业;在医疗领域,它提高了手术的精确性和安全性;在科研领域,它实现了更灵活、更精确的运动控制;在太空探索中,它帮助探测器在复杂环境中进行灵活移动;在部分领域,它提升了装备的机动性和作战效率。麦克纳姆轮将在更多领域发挥重要作用,为人类的生产和生活带来更多便利和效益。麦克纳姆轮重载AGV能否适配5吨以上物料搬运?销售麦克纳姆轮按需定制
麦克纳姆轮如何调整辊子角度?进口麦克纳姆轮大小
设计一个高性能的麦克纳姆轮平台控制系统是一个系统工程,可分为硬件和软件两层。硬件层面,重点是主控制器(如STM32、树莓派等)、电机驱动器(通常为四路)、带编码器的直流无刷伺服电机以及电源管理模块。软件层面是灵魂,其算法是逆运动学解算,负责将上层导航系统发出的速度指令(Vx, Vy, ω)转换为四个电机的目标转速。随后,每个电机形成一个闭环控制回路,通常采用PID控制算法。编码器实时反馈电机转速,与目标值比较后,PID控制器计算出调整量,通过驱动器以PWM形式驱动电机,消除转速误差。对于高阶应用,还会引入前馈控制来补偿惯性,或融合IMU(惯性测量单元)数据来校正由于轮子打滑导致的航向误差,确保在各种负载下都能平稳、精确地运动。进口麦克纳姆轮大小

随着智能制造、机器人技术的不断进步,麦克纳姆轮也在持续迭代创新。从材料升级到智能控制,从单一功能到多技术融合,未来的麦克纳姆轮将更加适应复杂场景,推动 “全向移动” 技术迈向新高度。材料创新将是麦克纳姆轮突破性能限制的关键方向。目前,辊子材料以聚氨酯为主,但未来将向 “功能化”“定制化” 发展。例如,针对户外场景,研发 “耐磨损 + 抗老化” 的复合聚氨酯材料,让麦克纳姆轮能在砂石路、雨天环境中使用;针对低温场景(如冷库、极地作业),开发 “耐低温 - 60℃” 的特种弹性材料,避免辊子硬化开裂;甚至研发 “自修复” 材料 —— 当辊子表面出现轻微磨损时,材料可自动填补缝隙,延长使用寿命。同时...
- 威力麦克纳姆轮价格查询 2026-07-08
- 绿色环保麦克纳姆轮定义 2026-07-08
- 户外麦克纳姆轮价格表 2026-07-08
- 什么是麦克纳姆轮按需定制 2026-07-08
- 哪些麦克纳姆轮有哪些 2026-07-08
- 环保麦克纳姆轮编号 2026-07-08
- 进口麦克纳姆轮价格多少 2026-07-08
- 固定麦克纳姆轮使用方法 2026-07-07
- 通用麦克纳姆轮按需定制 2026-07-07
- 环保麦克纳姆轮代理商 2026-07-07


- 常规麦克纳姆轮解决方案 2026-07-07
- 质量麦克纳姆轮电话 2026-06-30
- 工业麦克纳姆轮定义 2026-06-27
- 什么麦克纳姆轮拆装 2026-06-27
- 大型麦克纳姆轮机械结构 2026-06-27
- 多功能麦克纳姆轮哪个好 2026-06-27




- 新能源停车机器人使用方法 07-16
- 加工储能入柜车产业 07-16
- 停车机器人调整 07-16
- 靠谱的停车机器人定义 07-16
- 销售停车机器人大小 07-16
- 半自动停车机器人大小 07-15
- 购买停车机器人租赁 07-15
- 通用停车机器人服务电话 07-15
- 常规停车机器人零售价 07-15
- 省电停车机器人调试 07-15