- 品牌
- hictrl
- 型号
- OMV
随着智能制造、机器人技术的不断进步,麦克纳姆轮也在持续迭代创新。从材料升级到智能控制,从单一功能到多技术融合,未来的麦克纳姆轮将更加适应复杂场景,推动 “全向移动” 技术迈向新高度。材料创新将是麦克纳姆轮突破性能限制的关键方向。目前,辊子材料以聚氨酯为主,但未来将向 “功能化”“定制化” 发展。例如,针对户外场景,研发 “耐磨损 + 抗老化” 的复合聚氨酯材料,让麦克纳姆轮能在砂石路、雨天环境中使用;针对低温场景(如冷库、极地作业),开发 “耐低温 - 60℃” 的特种弹性材料,避免辊子硬化开裂;甚至研发 “自修复” 材料 —— 当辊子表面出现轻微磨损时,材料可自动填补缝隙,延长使用寿命。同时,轮辋材料也将向 轻量化升级,比如采用碳纤维复合材料替代传统铝合金,在降低车轮重量(减少电机负载)的同时,提升承重能力(比铝合金高 50% 以上),适合无人机载 AGV、轻型服务机器人等对重量敏感的场景。麦克纳姆轮与传统轮子相比有哪些优势?低温麦克纳姆轮产品介绍
在实际应用中,选择合适的麦克纳姆轮需要关注多个关键技术参数,这些参数直接决定了车轮的性能、适用场景与使用寿命。对于工程师、采购人员或技术爱好者来说,理解这些参数是确保设备稳定运行的基础。首先是 “尺寸参数”,包括车轮直径、宽度与辊子规格。车轮直径通常从 100mm 到 500mm 不等,小直径车轮(如 100-200mm)适合轻型设备(如服务机器人、小型 AGV),优点是灵活性高、占用空间小;大直径车轮(如 300-500mm)则适用于重型设备(如工业拖车、重型 AGV),可提升承重能力与越障性能(如跨越地面缝隙、小凸起)。车轮宽度与接触地面的稳定性相关,宽度越大,设备在横移时的抗倾覆能力越强;而辊子的数量与尺寸则影响车轮的抓地力 —— 辊子数量越多,与地面的接触点越密集,行驶时越平稳,不易打滑。其次是 “承重能力”,这是选型的指标之一。麦克纳姆轮的承重通常以 “单轮额定载重” 标注,范围从几十公斤到数吨不等(如轻型轮承重 50-200kg,重型轮承重 1-5 吨)。在选型时,需根据设备总重量(含负载)均匀分配到四个车轮上,且预留 20%-30% 的安全余量 —— 例如,一台总重 800kg 的 AGV,应选择单轮承重不低于 250kg(800kg÷4+30% 余量)的麦克纳姆轮,避免因过载导致辊子变形。哪里有麦克纳姆轮定义麦克纳姆轮不同尺寸的承重范围是多少?

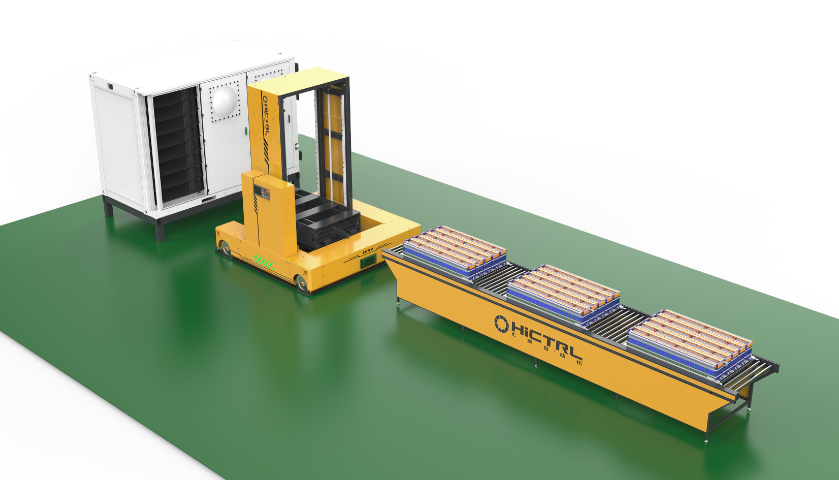
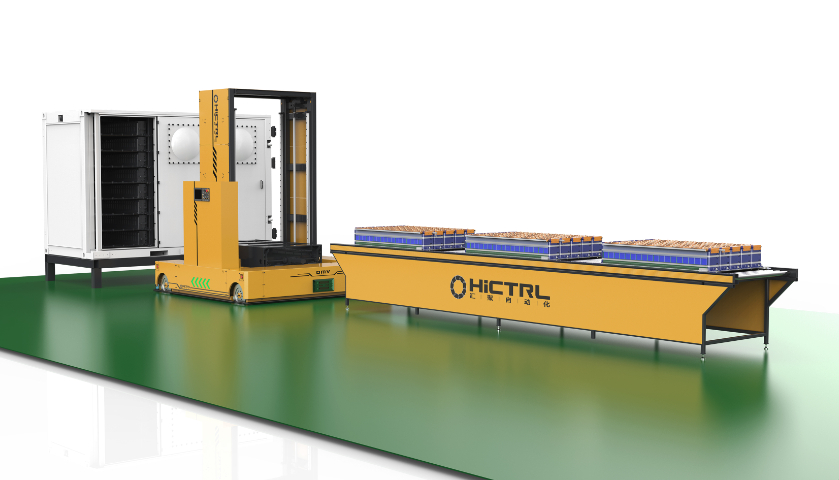
在现代制造业的物流转运领域,麦克纳姆轮的应用为AGV(自动导引车)带来了前所未有的灵活性。这种独特的轮组设计,使得AGV能够在狭小空间内实现全向移动,无论是直行、横移还是原地旋转,都能轻松应对。结合重载复合机器人的强大负载能力,AGV能够高效地搬运重型货物,如大型风能叶片、卷材等,提升了物流效率。在铸造业中,麦克纳姆轮AGV可用于浇注环节的物料转运,定位、平稳运行,确保生产流程的顺畅。同时,其升级产品还具备智能调度功能,可与工厂的MES系统无缝对接,实现智能化的物流管理。
麦克纳姆轮在于其特殊的设计结构。每个轮子由一个中心轮毂和一系列沿着45度角安装在轮毂上的滚轴组成。当这些滚轴与地面接触并随轮毂转动时,会施加斜向的力,从而实现平移、旋转以及任意方向的直线运动。这种移动技术无需改变车轮的朝向,即可使车辆在任何方向上自由移动和旋转,提高了设备的灵活性和机动性。在工业领域,麦克纳姆轮的应用极大地提高了生产效率。使用麦克纳姆轮的工业机器人能够在狭小空间内进行灵活的操作和移动,这对于需要在生产线、仓库等环境中进行精确作业的机器人来说尤为重要。同时,麦克纳姆轮还被广泛应用于自动引导车(AGV)上,这些车辆能够实现灵活移动,不*提高了工作效率,还减少了空间占用。在物料搬运、生产线配送等场景中,麦克纳姆轮AGV展现出了出色的性能和稳定性。 麦克纳姆轮的优缺点分析?

麦克纳姆轮车是一种具有独特优势的驱动装置,通过巧妙的轮子排列和运动控制,实现车辆在多个方向的灵活移动。其极高的灵活性和精 确度,能为机器人和车辆提供更好的机动性和更强的操控性能。
麦克纳姆轮车通常由四个轮子组成,每个轮胎的轮缘上斜向分布着许多小辊子,这些小辊子形成“X”字型排列,使得轮子可以横向滑移。而且每个轮子可以独自地自由旋转,其方向可以通过改变轮子的旋转速度来调整,而不用改变机轮自身的方向。
麦克纳姆轮车是一种独特的轮胎设计。使其在不改变机轮自身的方向,即可实现在任意方向上前进、后退、平移、旋转,且每个轮子可以独自转动。其具备全向移动、移动效率高以及灵活稳定的优点,常被用于自动化机器人、医疗器械和无人驾驶车辆等领域。 麦克纳姆轮AGV与传统差速轮AGV在重载搬运中有何优劣对比?综合麦克纳姆轮怎么样
麦克纳姆轮重载AGV技术升级方向是什么?低温麦克纳姆轮产品介绍
建立精确的运动学模型是实现对麦克纳姆轮平台控制的理论基石。该模型的重点在于描述机器人整体运动与各个轮子转速之间的数学关系。通常,我们定义机器人的运动状态为三个量:沿车体坐标系X轴的速度、沿Y轴的速度以及绕中心旋转的角速度。运动学分析的目标就是找到一个转换矩阵(即雅可比矩阵),将这三种运动与四个轮子的转速线性地联系起来。通过求解这个矩阵的逆矩阵,我们可以将期望的机器人整体运动指令,解算为每个轮子需要达到的具体目标转速。反之,通过测量轮子的实际转速(通过编码器),也可以反推出机器人的实际运动状态。这个模型不*用于控制,也是进行轨迹规划、误差分析和性能优化的关键工具。低温麦克纳姆轮产品介绍

随着智能制造、机器人技术的不断进步,麦克纳姆轮也在持续迭代创新。从材料升级到智能控制,从单一功能到多技术融合,未来的麦克纳姆轮将更加适应复杂场景,推动 “全向移动” 技术迈向新高度。材料创新将是麦克纳姆轮突破性能限制的关键方向。目前,辊子材料以聚氨酯为主,但未来将向 “功能化”“定制化” 发展。例如,针对户外场景,研发 “耐磨损 + 抗老化” 的复合聚氨酯材料,让麦克纳姆轮能在砂石路、雨天环境中使用;针对低温场景(如冷库、极地作业),开发 “耐低温 - 60℃” 的特种弹性材料,避免辊子硬化开裂;甚至研发 “自修复” 材料 —— 当辊子表面出现轻微磨损时,材料可自动填补缝隙,延长使用寿命。同时...
- 威力麦克纳姆轮价格查询 2026-07-08
- 绿色环保麦克纳姆轮定义 2026-07-08
- 户外麦克纳姆轮价格表 2026-07-08
- 什么是麦克纳姆轮按需定制 2026-07-08
- 哪些麦克纳姆轮有哪些 2026-07-08
- 环保麦克纳姆轮编号 2026-07-08
- 进口麦克纳姆轮价格多少 2026-07-08
- 固定麦克纳姆轮使用方法 2026-07-07
- 通用麦克纳姆轮按需定制 2026-07-07
- 环保麦克纳姆轮代理商 2026-07-07



- 常规麦克纳姆轮解决方案 2026-07-07
- 质量麦克纳姆轮电话 2026-06-30
- 工业麦克纳姆轮定义 2026-06-27
- 什么麦克纳姆轮拆装 2026-06-27
- 大型麦克纳姆轮机械结构 2026-06-27
- 多功能麦克纳姆轮哪个好 2026-06-27



- 常规储能入柜车互惠互利 07-17
- 加工储能入柜车价格 07-17
- 国内储能入柜车互惠互利 07-17
- 销售储能入柜车哪个好 07-17
- 综合储能入柜车按需定制 07-17
- 什么是停车机器人进货价 07-16
- 哪里有储能入柜车怎么用 07-16
- 库存停车机器人量大从优 07-16
- 国内储能入柜车方案设计 07-16
- 直销停车机器人怎么收费 07-16