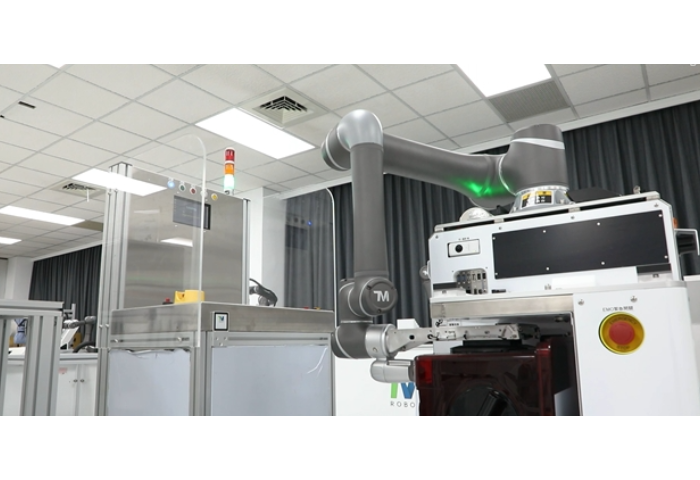
简而言之,一个复合机器人,区别于“人形机器人”,但也有脚(AGV)、手(机械臂)、眼(3D视觉)、脑(AI)。海默复合机器人可快速布局于自动化工厂、机房数据管理(存储服务器数据取放)、电力巡检、仓储分拣、自动化货物超市,实现物料自动搬运、物品上下料、物料分拣等,更好的满足行业需求。AGV小车机器人,负责在厂区运送物料;但AGV做不了把物料从车上取走,这就需要在AGV上装上“协作机器人”。协作机器人就是轻型六轴机械臂,由它们来搬取和作业;为了识别各种不规范情形(比如倾斜、反转、翻倒等),要有3D激光机器视觉来分辨;当然还要让机器人多进行深度学习以提智能化,那要有AI来相助。达明机器人(上海)有限公司致力于提供复合机器人,有想法的可以来电!江苏组装复合机器人

基于智能移动机器人、协作机器人、视觉识别等技术的综合应用。可快速布置于自动化工厂、仓储分拣、自动化货物超市,实现物料自动搬运、CNC上下料、自动分拣等功能。 技术规格: 常规负载:20kg 运行速度:0.5/0.8m/s 手臂末端综合作业精度:<0.5mm 定位技术:Mark定位 导航:激光导航 人工智能:人工智能技术可以帮助机器人进行决策和规划。通过机器学习、深度学习等技术,机器人可以自主地学习并实现自主规划,实现更加复杂的任务。 控制系统:控制系统可以帮助机器人控制其运动和行为。控制系统通常由计算机程序和电子设备组成,可以让机器人实现精度的运动和行为控制。浙江AMR复合机器人制作达明机器人(上海)有限公司致力于提供复合机器人,有需求可以来电!

根据MIR DATABANK数据显示,中国移动机器人市场规模从2018年到2021年几乎呈现了翻倍增长,其中2021年同比增速近30%。移动机器人市场发展步入快车道,国家同步出台了《“十四五”机器人产业发展规划》对移动机器人给予重点关注。提出到2025年将中国建设成为全球机器人技术创策源地、制造集聚地和集成应用地的目标。搬运一个8寸的晶圆盒相当于将千万元背在机器人身上,一旦出现一次损失可能这家企业就要离开这个行业了;是精度要求,在对接机台时不能出现任何偏差。
随着工厂内部制造复杂程度的日益上升,对于自动化设备柔性化的需求也更加迫切,柔性复合机器人的出现具有能够在复杂环境下惊醒灵活工作的特点,同时,柔性复合机器人也能够在不断变形之中完成各项任务、计划等,对于人机协同工作的开展以及发展来说,能够起到提升安全性的关键作用,值得相关领域及行业及时的推行与探索。然而需要注意的是,当前柔性复合机器人的发展还处于“刚刚起步”初步发展阶段,对于设备使用中所发生的问题仍然需要研究人员进行重点关注,以保证柔性复合机器人期的顺利投入适用。复合机器人,就选达明机器人(上海)有限公司,用户的信赖之选,有想法可以来我司!
复合型机器人的优点包括:度智能化:复合型机器人采用了多种级技术,如人工智能、视觉识别和自主规划等,可以实现度自主化和智能化的操作,减少人工干预和提工作效率。多功能性:复合型机器人可以在不同的环境下执行多种任务,如搬运、装配、打磨、切割、检测等,具有度的灵活性和多功能性。精度:复合型机器人具有精度的运动和行为控制,可以实现精细的操作和精确的加工、装配等任务,提了产品质量和工作效率。安全性:复合型机器人通常具有多重安全措施,如传感器监控、防碰撞装置等,可以确保机器人的安全性,减少事故发生的可能性。提生产效率:复合型机器人可以在24小时内不间断地工作,而不需要休息和休息时间,可以提生产效率和降低生产成本。可重构性:复合型机器人通常具有可重构性和可定制性,可以根据任务的需要进行组合和重构建,实现多样化的应用和适应不同环境的需求。环保节能:复合型机器人可以在生产和运作中减少能源的浪费和环境污染,提生产的环保性和节能性。复合机器人,就选达明机器人(上海)有限公司,让您满意,期待您的光临!浙江AMR复合机器人制作
达明机器人(上海)有限公司致力于提供复合机器人,竭诚为您服务。江苏组装复合机器人
柔性复合机器人在进行设计的过程中,所采用的是激光导航的形式进行设计的,施工量小且地面不需要任何诱导线的设计,在路径的改变上十分灵活,系统柔性很大。同时,也采用了激光测量传感器进行设计,激光测量传感器所适用的是低能量脉冲式激光、红外波段,不需要原有点式光源光路进行发散,任何情况下都对人眼无害。激光测量传感器所应用的是侧角及测距的测算方法,位置的信息也是处理器来进行计算的,这样,测量的精确性以及可靠性,还有就是系统的测量速度都能够得到有效保证。江苏组装复合机器人




