一:直流伺服电机和交流伺服电机在基本结构上的对比:直流伺服电机结构与直流电动机相似。电机转速n=E/K1j=(Ua-IaRa)/K1j,式中E为电枢反电动势,K为常数,j为每极磁通,Ua、Ia为电枢电压和电枢电流,Ra为电枢电阻,改变Ua或改变φ,均可控制直流伺服电动机的转速,但一般采用控制电枢电压的方法,在永磁式直流伺服电动机中,励磁绕组被永久磁铁所取代,磁通φ恒定。交流伺服电机的结构与交流异步电机相似。在定子上有两个相空间位移90°电角度的励磁绕组Wf和控制绕组WcoWf,接恒定交流电压,利用施加到Wc上的交流电压或相位的变化,达到控制电机运行的目的。二:直流伺服电机和交流伺服电机优点和缺点的对比(1)、直流伺服电机的优点和缺点优点:速度控制精确,转矩速度特性很硬,控制原理简单,良好的线性调节特性、快速的时间响应,使用方便,价格便宜。缺点:电刷换向,速度限制,附加阻力,产生磨损微粒(无尘易爆环境不宜)电容运转式单相异步电动机、电容起动运转式单相异步电动机和分相式单相异步电动机。摇头电机
直线电机结构紧凑、功率损耗小、快移速度高、加速度高、高速度(直线电机通过直接驱动负载的方式,可以实现从高速到低速等不同范围的高精度位置定位控制;运用于地铁的自动门。伺服电机在低速时易出现低频振动现象,振动频率与负载情况和驱动器性能有关;一般认为振动频率为电机空载起跳频率的一半。这种由伺服电机的工作原理所决定的低频振动现象对于机器的正常运转非常不利。当伺服电机工作在低速时,一般应采用阻尼技术来克服低频振动现象,比如在电机上加阻尼器,或驱动器上采用细分技术等。目前用于电脑绣花机的伺服电机多数为五相混合式伺服电机,目的是通过采用高相数的步进电机来减小步矩角和提高控制精度;但是采用该种方式获得的性能上的提高是有限的,而且成本也相对较高,采用细分驱动技术可以改善伺服电机的运行品质,减少转矩波动,抑制振荡,降低噪音,提高步矩分辨率。其实直线电机也是伺服电机的一种。理论上,只要有反馈的系统(直线电机通常以Hall或者直线光栅反馈)都应该是伺服系统。所以伺服电机应该在广义上被分为两类:旋转伺服电机和直线伺服电机,直线电机的特点:高动态特性、高刚性,相对于传统的直线传递结构,免维护,但成本较高。 重合闸智能断路器一字闸是早期的闸机之一,拦阻体(闸杆)是一根金属杆,一般采用中空封闭的不锈钢管,坚固不易变形。
对运动中的动态性能有比较高的要求时需要实时对电机进行调整。那么如果控制器本身的运算速度很慢(比如plc,或低端运动控制器),就用位置方式控制。如果控制器运算速度比较快,可以用速度方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是控制器才能这么干,而且,这时完全不需要使用伺服电机。
电机是指依据电磁感应定律实现电能的转换或传递的一种电磁装置。电机(俗称马达),在电路中用字母"M"(旧标准用"D")表示。它的主要作用是产生驱动转矩,作为用电器械或各种机械的动力源。1.同步电动机还可分为永磁同步电动机、磁阻同步电动机和磁滞同步电动机。2.异步电动机可分为感应电动机和交流换向器电动机。3.感应电动机又分为三相异步电动机、单相异步电动机和罩极异步电动机等。4.交流换向器电动机又分为单相串励电动机、交直流两用电动机和推斥电动机。5.直流电动机按结构及工作原理可分为无刷直流电动机和有刷直流电动机。根据电动机工作电源的不同,可分为直流电动机和交流电动机。其中交流电动机还分为单相电动机和三相电动机。

电动机绕组故障分析和处理方法绕组是电动机的组成部分,老化,受潮、受热、受侵蚀、异物侵入、外力的冲击都会造成对绕组的伤害,电机过载、欠电压、过电压,缺相运行也能引起绕组故障。绕组故障一般分为绕组接地、短路、开路、接线错误。如今分别说明故障现象、产生的原因及检查方法。绕组接地指绕组与铁芯或与机壳绝缘破坏而造成的接地。1、故障现象机壳带电、控制线路失控、绕组短路发热,致使电动机无法正常运行。2、产生原因绕组受潮使绝缘电阻下降;电动机长期过载运行;有害气体腐蚀;金属异物侵入绕组内部损坏绝缘;重绕定子绕组时绝缘损坏碰铁心;绕组端部碰端盖机座;定、转子磨擦引起绝缘灼伤;引出线绝缘损坏与壳体相碰;过电压(如雷击)使绝缘击穿。行星减速机采用润滑油润滑。上海人行闸机
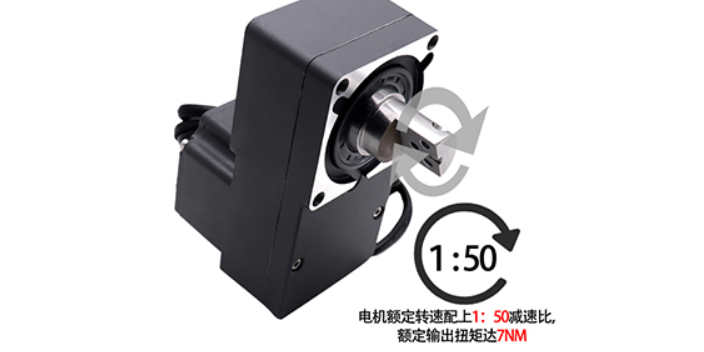
1对极对数电机转速:3000转/分;2对极对数电机转速:60×50/2=1500转/分。摇头电机
控制方式一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。1、速度控制速度环框图(1)速度制即电机按照给定的速度指令进行运转(2)速度控制的应用场合相当广泾用场合有:需要快速响座的连续调速系统;由上位闭环的定位系统;需要多栏速度进行快速切换的系统。(3)通常伺服的速度给定为模拟量,即模拟量幅值的大小决定了给定速度的大小,正负决定电机应关系取决于速度指令增益(Pn300)。注意事项(1)速度环增益Pn102,通常是设定高一些以使得整个系统响应快一些,电机刚性也会增强。但是增益大了可能导致系统振动。一般负载惯量大的场合该参数设得大一些。(2)速度环积分时间Pn103,它的作用是消除静差,数值设得越大响应越慢,到达指令时间越长。通常负载惯量越大,积分时间应设定得越大。(3)上位机作闭环时,应尽量不要设置软起动减速时间参数Pn306、Pn307。摇头电机
深圳市门霸科技有限公司依托可靠的品质,旗下品牌门霸;MBTEK以高质量的服务获得广大受众的青睐。是具有一定实力的电工电气企业之一,主要提供无刷伺服电机,无刷伺服驱动,无刷伺服控制器,配套软件等领域内的产品或服务。我们强化内部资源整合与业务协同,致力于无刷伺服电机,无刷伺服驱动,无刷伺服控制器,配套软件等实现一体化,建立了成熟的无刷伺服电机,无刷伺服驱动,无刷伺服控制器,配套软件运营及风险管理体系,累积了丰富的电工电气行业管理经验,拥有一大批专业人才。门霸科技始终保持在电工电气领域优先的前提下,不断优化业务结构。在无刷伺服电机,无刷伺服驱动,无刷伺服控制器,配套软件等领域承揽了一大批高精尖项目,积极为更多电工电气企业提供服务。