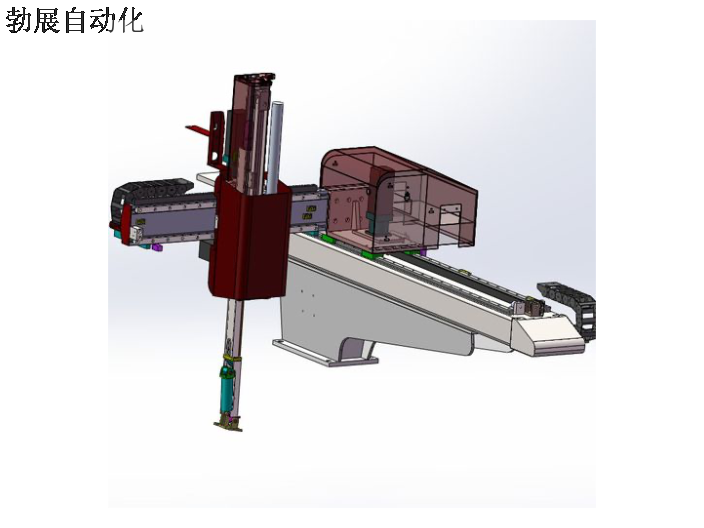
当机械手重新启动时可以对其进行原点复位处理让系统坐标定位更准确。3、现有三轴桁架机器人大多都没对导轨进行防尘处理,导致导轨时常要进行清理而本发明安装了防尘板可以有效的阻挡灰尘落在导轨上。4、由于安装地面通常是高低不平的,所以在进行底座安装时两边底座可能不能保持在同一水平高度导致横梁发生倾斜。本发明采用了水平调节螺母可以调整横梁保持水平,不发生倾斜现象。5、装置整体的负载量变大,方便进行安装维护,适应现代化生产要求对于速度的要求。附图说明图1为本实用新型整体结构示意图;图2为本实用新型立柱部件的结构示意图;图3为本实用新型x轴部件的结构示意图;图4为本实用新型y轴部件的结构示意图;图5为本实用新型y轴部件的局部结构示意图;图6为本实用新型z轴部件的结构示意图。图中:1、立柱部件;2、x轴部件;3、y轴部件;4、z轴部件;11、支撑柱柱体;12、顶部调节螺栓;13、底部调节螺栓;14、立柱调节垫块;21、导轨底座一;22、固定板一;23、直线导轨一;24、防尘板;25、限位模块一;26、限位光电传感器;27、齿条一;28、复位光电传感器;29、滑块一;210、连接块;211、电机安装板;212、限位片;213、伺服电机一;214、安装外壳。桁架机械手设备,就选浙江勃展工业自动化设备有限公司,用户的信赖之选,欢迎您的来电!湖南桁架机械手 施工

15、固定块;16、推杆;17、弹簧;18、限位块。具体实施方式下面结合附图1-3对本技术的具体实施方式做进一步详细说明。实施例一,由图1-3给出,本技术提供一种桁架机械手送料夹具,包括Z轴固定板1、安装板2、安装孔3、缓冲机构4、滑动机构5、夹紧缸固定板6、工件夹紧气缸7和夹紧板8,Z轴固定板1顶部靠近两端位置处均焊接有安装板2,安装板2上开设有若干个安装孔3,Z轴固定板1一侧的中部安装有缓冲机构4,Z轴固定板1的底部通过滑动机构5安装有夹紧缸固定板6,夹紧缸固定板6的底端安装有工件夹紧气缸7,工件夹紧气缸7的两侧均安装有夹紧板8;滑动机构5包括固定螺栓9、滑块10和滑槽11,滑块10通过固定螺栓9安装在夹紧缸固定板6的底部,滑槽11通过固定螺栓9安装在夹紧缸固定板6上;缓冲机构4包括第二固定螺栓12、第二限位块13、安装铒14、固定块15、推杆16、弹簧17和限位块18,第二限位块13通过第二固定螺栓12安装在夹紧缸固定板6一侧的中部,安装铒14焊接在夹紧缸固定板6另一侧的中部,安装铒14的一侧安装有固定块15,固定块15的一侧安装有推杆16,推杆16上套接有弹簧17,推杆16一端的夹紧缸固定板6上安装有限位块18。推杆16的一端设置有圆盘。南京数控车床桁架机械手浙江勃展工业自动化设备有限公司是一家专业提供桁架机械手设备的公司,有想法的不要错过哦!

9、圆环板;10、上料装置;11、锥齿轮;12、第二锥齿轮;13、活动轴;14、竖板;15、连接板;16、活动板;17、固定装置;18、第二齿轮;19、凹槽;20、圆轴;21、第三齿轮;22、第四齿轮;23、第三滑槽;24、横槽;25、夹板;26、连杆;27、顶板;28、圆杆;29、底板;30、滑槽;31、滑块;32、第二滑槽;33、第二滑块;34、弹簧;35、橡胶垫;36、支撑板;37、矩形槽。具体实施方式为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。实施例1,如图1-5所示:一种桁架机械手的上料道单元,包括外壳1,外壳1呈圆形设置,外壳1的内腔底面上固定连接有电机2,电机2的转子上固定连接有主轴3,主轴3远离电机2一端贯穿外壳1的底面固定连接有异形齿轮4,主轴3与外壳1之间活动连接设置,异形齿轮4的一侧设置有与其相互匹配的齿轮5,齿轮5的顶面中心固定连接有转轴6。
桁架机械手能模仿人手完成很多高难度的动作来实现不同的操作1、抓取物件、夹紧、放开操作桁架机械手能完成简单的抓取物品的功能,通过上位机给出手臂能抓取的范围坐标,调整好角度及高度桁架机械手就能实现自动的抓取物件操作,整个过程中能实现精细抓取并夹紧等动作操作,使抓物准确性高不会落空也不会使物件掉落。经常可用于很多加工厂或电子厂进行各类物品的抓取包装操作。紧急刹车对部件有损伤所以建议还是把速度调整到合适的才是比较好的。随着机器人的普及,贵溪桁架机械手,机器人第七轴作为机器人的辅助行走机构也备受企业的关注,例如一些工作周期很长,作业范围大,需要多台机器管理一个工位的场合很适合应用第七轴。机器人第七轴,又叫机器人行走轴,可以根据应用场合分为很多种形式,地面行走式、侧挂行走轴、底挂行走轴等,不同的样式适合不同的作业环境,造价成材都会有所区别,下面为大家简述一下第七轴常见的样式。性能问题:二手助力机械手往往已经已经过时,功能有时候不能达到需求。桁架机械手的三轴结构X轴X轴的导轨安装梁,通常采用工业铝型材料(具有超高刚性),用龙门加工中心加工出导轨安装基准/齿条安装基准。X轴导轨安装梁,桁架机械手。浙江勃展工业自动化设备有限公司致力于提供 桁架机械手设备,有想法可以来我司咨询!

机械手臂(2)包括相互转动连接的一级臂(21)和二级臂(22),一级臂(21)与桁架(1)连接,其特征在于:所述二级臂(22)末端设有机械手爪(24),机械手爪(24)包括转动连接在二级臂(22)末端的转臂(23),转臂(23)末端固定有爪盘(25),爪盘(25)的外圆上设有若干个环绕爪盘(25)设置的爪杆(26),爪杆(26)呈折弯形状设置,其中间位置与爪盘(25)铰接,转臂(23)内设有用于带动爪杆(26)绕铰接点旋转的驱动件(3),驱动件(3)包括与爪盘(25)同轴心转动连接的驱动盘(39),以及用于带动驱动盘(39)旋转的主动件(7)(4),驱动盘(39)呈棘轮形状设置,爪杆(26)末端与驱动盘(39)相互抵接且能够相对滑移。2.根据权利要求1所述的桁架机械手,其特征在于:所述钩爪与驱动盘(39)之间设有用于连接爪杆(26)和驱动盘(39)的连接扣(41),驱动盘(39)外缘设有卡槽(391),连接扣(41)一端嵌设在卡槽(391)中,另一端与连接爪杆(26)末端铰接。3.根据权利要求2所述的桁架机械手,其特征在于:所述驱动件(3)包括设于爪盘(25)中轴线上的主动轴(42),主动轴(42)穿透驱动盘(39)并与其固定连接,驱动件(3)还包括设于转臂(23)内用于带动主动轴(42)旋转的驱动电机(43)。4.根据权利要求3所述的桁架机械手。浙江勃展工业自动化设备有限公司为您提供桁架机械手设备,欢迎您的来电!舟山桁架机械手 图纸
桁架机械手设备,就选浙江勃展工业自动化设备有限公司,让您满意,欢迎新老客户来电!湖南桁架机械手 施工
本实用新型属于数控机床零件加工装置技术领域,具体涉及一种全自动数控机床加工的桁架机械手。背景技术:数控加工是指由控制系统发出指令使刀具作符合要求的各种运动,以数字和字母形式表示工件的形状和尺寸等技术要求和加工工艺要求进行的加工。它泛指在数控机床上进行零件加工的工艺过程,现有的数控机床零件加工行业主要以人工上下料,一人一机,工人劳动强度大,安全系数低,需要人工数量多,特别是多工序产品的生产,需要投入大量劳动力才能完成,增加了企业的生产成本。为此,我们推出一种全自动数控机床加工的桁架机械手。技术实现要素:本实用新型的目的在于提供一种全自动数控机床加工的桁架机械手,以解决上述背景技术中提出的问题。为实现上述目的,本实用新型提供如下技术方案:一种全自动数控机床加工的桁架机械手,包括上下一体立柱,所述上下一体立柱的下端固定安装有连接机床基座的固定装置,所述上下一体立柱的上端固定安装有机械手横梁,所述机械手横梁上滑动安装有xyz轴模组总成,所述xyz轴模组总成的下方设有机械手臂,所述机械手臂上安装有手臂末端夹爪,所述固定装置的上方固定安装有料仓。此项设置上下一体立柱末端有连接机床基座的固定装置。湖南桁架机械手 施工
浙江勃展工业自动化设备有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度,多年以来致力于发展富有创新价值理念的产品标准,在浙江省等地区的机械及行业设备中始终保持良好的商业口碑,成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力,浙江勃展工业自动化设备供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!