r>气缸的活塞杆的端部与所述延伸臂连接;所述吸附爪组件包含吸附爪,吸附爪上连接有与外部气源连通的气管,吸附爪的下表面设置吸嘴,气管吸气时通过吸嘴将与吸附爪下表面接触的产品吸住;所述吸附爪通过升降气缸驱动升降。本技术的推荐实施方式和进一步的改进点如下:(1)吸附爪组件的升降气缸固定安装在工字支撑架的平行表面上,升降气缸的活塞杆朝下,升降气缸的表面沿着高度方向开设升降滑轨,所述升降滑轨上组装有升降滑板,升降滑板的底端延伸出与升降气缸的活塞杆的端部连接的水平延伸板;所述吸附爪固定安装在所述水平延伸板的下表面。(2)所述横向导轨的两侧设置有限位开关;所述升降气缸的升降滑轨上同样设置有限位开关。(3)所述传输带上设置有用于承接吸附爪拾取来的产品的定位组件以及用于夹持和放松定位组件的拦截机构。本技术有益效果是:本技术公开的用于塑胶壳体生产线的机械手,用于将注塑机内的产品拾取至传输带,所述注塑机设置在传输带的侧面;包含设置在支撑架上的立柱,立柱顶端设置垂直于传输带的传输方向的横梁;所述横梁上设置横向导轨,所述横向导轨上滑动组装横移滑块,所述滑块上固定垂直于横梁方向的延伸臂。桁架机械手设计生产安装一体化!苏州桁架机械手铝型材

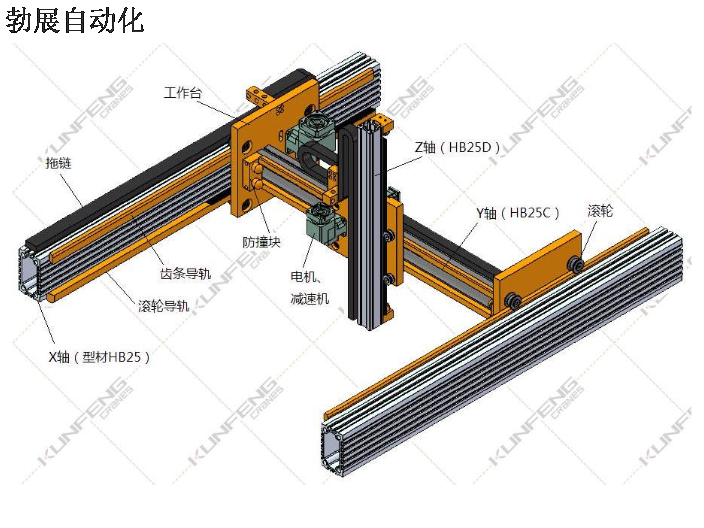
桁架机械手能模仿人手完成很多高难度的动作来实现不同的操作1、抓取物件、夹紧、放开操作桁架机械手能完成简单的抓取物品的功能,通过上位机给出手臂能抓取的范围坐标,调整好角度及高度桁架机械手就能实现自动的抓取物件操作,整个过程中能实现精细抓取并夹紧等动作操作,使抓物准确性高不会落空也不会使物件掉落。经常可用于很多加工厂或电子厂进行各类物品的抓取包装操作。紧急刹车对部件有损伤所以建议还是把速度调整到合适的才是比较好的。随着机器人的普及,贵溪桁架机械手,机器人第七轴作为机器人的辅助行走机构也备受企业的关注,例如一些工作周期很长,作业范围大,需要多台机器管理一个工位的场合很适合应用第七轴。机器人第七轴,又叫机器人行走轴,可以根据应用场合分为很多种形式,地面行走式、侧挂行走轴、底挂行走轴等,不同的样式适合不同的作业环境,造价成材都会有所区别,下面为大家简述一下第七轴常见的样式。性能问题:二手助力机械手往往已经已经过时,功能有时候不能达到需求。桁架机械手的三轴结构X轴X轴的导轨安装梁,通常采用工业铝型材料(具有超高刚性),用龙门加工中心加工出导轨安装基准/齿条安装基准。X轴导轨安装梁,桁架机械手。长宁区桁架机械手结构浙江勃展工业自动化设备有限公司是一家专业提供桁架机械手的公司,期待您的光临!

圆盘的直径均大于推杆16和弹簧17的直径,便于配合使用。安装孔3开设的数量为三个,便于安装固定。滑块10滑动连接在滑槽11内,便于滑动。滑槽11的内部涂有润滑脂,提高润滑性能。弹簧17的外侧套有弹簧套,便于保护弹簧17。工作原理:本技术使用时,桁架Z轴通过螺栓安装在安装板2上,工件夹紧气缸7收缩带动夹紧板8向内移动,通过夹紧板8对工件进行夹紧,夹紧后,桁架Z轴向左移动带动Z轴固定板1向左移动,送进主轴卡盘,工件的左侧端面与卡盘的定位右端面接触后,主轴卡盘产生的反作用力推动工件,工件推动夹紧板8,夹紧板8推动工件夹紧气缸7,工件夹紧气缸7推动夹紧缸固定板6,夹紧缸固定板6在滑块10和滑槽11的作用下,使得夹紧缸固定板6向右侧移动,设置的第二限位块13用来对夹紧缸固定板6进行限位,移动一端距离后,弹簧17的反作用力会推动限位块18,限位块18推动夹紧缸固定板6,夹紧缸固定板6带动工件夹紧气缸7和夹紧板8向左移动,使得夹紧板8内侧的工件与卡盘的定位右端面紧密接触。有益效果:本技术结构新颖,构思巧妙,工件与卡盘的定位面紧密接触,将刚性送料变成了柔性送料,保证了加工精度,桁架Z轴滑台的作用力,延长桁架的使用寿命。
本实用新型涉及机械设备技术领域,具体为一种气动助力机械手。背景技术:助力机械手,又称机械手、平衡吊、平衡助力器,是一种新颖的、用于物料搬运及安装时省力操作的助力设备。它巧妙地应用力的平衡原理,使操作者对重物进行相应的推拉,就可在空间内平衡移动定位。无需熟练的点动操作,操作者用手推拉重物,就可以把重物正确地放到空间中的任何位置。但是目前机械加工中所使用的助力机械手并不能很好的满足重物移动的需求,存在着稳定性差,移动的范围小,移动不够精细,适用性差,重物的固定不够牢固,危险性较大的问题。针对上述问题,在原有助力机械手的基础上进行创新设计。技术实现要素:本实用新型的目的在于提供一种气动助力机械手,以解决上述背景技术中提出稳定性差,移动的范围小,移动不够精细,适用性差,重物的固定不够牢固,危险性较差的问题。为实现上述目的,本实用新型提供如下技术方案:一种气动助力机械手,包括电动机、气缸、配重块和机械手,所述电动机的右侧设置有立柱,且立柱的底部安装有固定底座,所述立柱的外侧固定有控制面板,所述气缸的内侧连接有储气罐,所述立柱的右侧设置有液压缸,所述立柱的上方安装有固定卡槽。桁架机械手设备,就选浙江勃展工业自动化设备有限公司,让您满意,欢迎新老客户来电!

12-横移活塞杆,13-气缸连接架;101-工字支撑架,102-吸附爪,103-升降活塞杆,104-升降滑板,105-升降气缸,106-延伸臂。具体实施方式下面结合附图及实施例描述本技术具体实施方式:如图1和图2所示,其示出了本技术的具体实施方式,如图所示,本技术公开的用于塑胶壳体生产线的机械手,用于将注塑机5内的产品拾取至传输带3,所述注塑机设置在传输带的侧面;包含设置在支撑架上的立柱2,立柱顶端设置垂直于传输带的传输方向的横梁8;所述横梁上设置横向导轨9,所述横向导轨上滑动组装横移滑块11,所述滑块上固定垂直于横梁方向的延伸臂106;在本具体实施例中,如图所示,立柱的数量为两个,其用于可靠支撑横梁,同时错开了原本的支撑架的位置;如图所示,所述延伸臂的端部设置有横移机架10;所述横移机架包含横截面为工字型的工字支撑架101;工字支撑架的两个平行表面上分别设置一组用于伸入至注塑机内拾取注塑完成后的产品的吸附爪组件;如图所示,所述横梁的侧面通过气缸连接架固定安装有与横梁平行的横移气缸7,横移气缸的活塞杆的端部与所述延伸臂连接;如图所示,所述吸附爪组件包含吸附爪102,吸附爪上连接有与外部气源连通的气管,吸附爪的下表面设置吸嘴。浙江勃展工业自动化设备有限公司是一家专业提供桁架机械手设备的公司,有需求可以来电咨询!河南桁架机械手厂家排名
桁架机械手设备,就选浙江勃展工业自动化设备有限公司,让您满意,欢迎您的来电哦!苏州桁架机械手铝型材
减少运行时的抖动,产品拿取精度更高,方便移动和多工序连线,机械手横梁用钢板焊接后在和上下一体立柱焊接,一次加工完成,保证机械手运行时的刚性强度和平行度,取代常规的铝型材横梁。推荐的,所述xyz轴模组总成包括x轴左右移动伺服模组、y轴前后移动伺服模组和z轴上下移动伺服模组。推荐的,所述手臂末端夹爪包含一个90度旋转气缸、二个带检测功能的中通弹簧推杆式三爪气缸和手爪夹具。推荐的,所述料仓包括一个移动料盘的伺服模组、产品位置定位模板及一个气缸带动排料杆的卸料装置。推荐的,所述上下一体立柱的后侧面固定安装有plc控制器。本实用新型的技术效果和优点:本实用新型可以实现数控机床自动上下料,真正做到全自动加工产品,运行稳定,刚性强,与机床一体化不会产生位移的效果,并能保证产品装夹的精度与检测的要求,提高生产效率。使用时,机械手从料仓将毛坯零件取出,迅速将零件运送到机床的上方,天窗开启后将零件精确送到机床的夹具里,带检测功能的中通弹簧推杆式三爪气缸松开并检测产品是否送到机床夹具里,弹簧推杆灯闪亮,证明产品到位,机床自动夹紧加工产品,机械手退回到料仓7拿好零件运行到天窗处等待机床加工完产品,产品加工完成天窗打开。苏州桁架机械手铝型材
浙江勃展工业自动化设备有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在浙江省等地区的机械及行业设备中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同浙江勃展工业自动化设备供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!