- 品牌
- 台达
- 型号
- 面议
- 结构形式
- 模块式,整体式
- 安装方式
- 现场安装,控制室安装
- LD指令处理器
- 软PLC,硬PLC
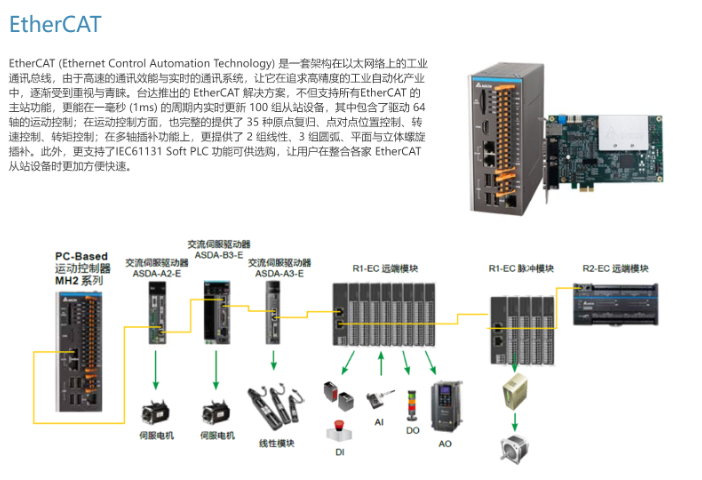
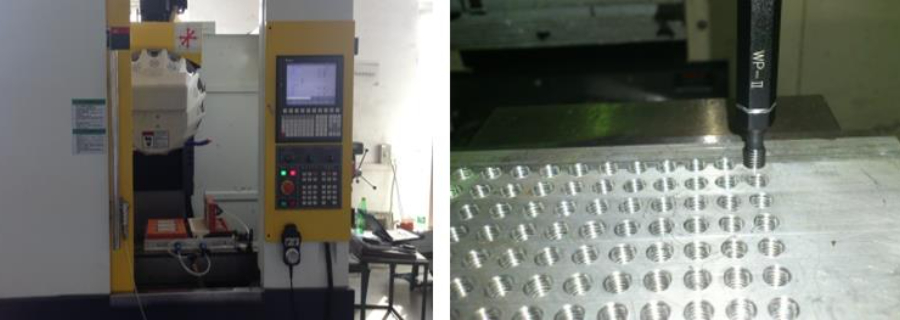
工具磨床的多轴联动控制技术是实现复杂刀具磨削的关键,尤其在铣刀、钻头等刃具加工中不可或缺。工具磨床通常需实现X、Y、Z三个线性轴与A、C两个旋转轴的五轴联动,以磨削刀具的螺旋槽、后刀面、刃口等复杂结构。例如加工φ10mm的高速钢立铣刀时,C轴控制工件旋转(实现螺旋槽分度),A轴控制工件倾斜(调整后刀面角度),X、Y、Z轴协同控制砂轮轨迹,确保螺旋槽导程精度(误差≤0.01mm)与后刀面角度精度(误差≤0.5°)。为保证五轴联动的同步性,系统采用高速运动控制器(运算周期≤0.5ms),通过EtherCAT工业总线实现各轴数据传输(传输速率100Mbps),同时配备光栅尺(分辨率0.1μm)与圆光栅(分辨率1角秒)实现位置反馈,确保砂轮轨迹与刀具三维模型的偏差≤0.002mm。在实际加工中,还需配合CAM软件(如UGCAM、EdgeCAM)生成磨削代码,将刀具的螺旋槽、刃口等特征离散为微小运动段,再由数控系统解析为各轴运动指令,终实现一次装夹完成铣刀的全尺寸磨削,相比传统分步磨削,效率提升40%以上,刃口粗糙度可达Ra0.2μm。宁波车床运动控制厂家。嘉兴复合材料运动控制开发

磨床运动控制中的砂轮修整控制技术是维持磨削精度的,其是实现修整器与砂轮的相对运动,恢复砂轮的切削性能。砂轮在磨削过程中会出现磨损、钝化(磨粒变圆)与堵塞(切屑附着),需定期通过金刚石修整器进行修整,修整周期根据加工材料与磨削量确定(如加工不锈钢时每磨削50件修整一次)。修整控制的关键参数包括修整深度(0.001-0.01mm)、修整速度(0.1-1m/min)与修整次数(1-3次):例如修整φ400mm的白刚玉砂轮时,修整器以0.5m/min的速度沿砂轮端面移动,每次修整深度0.003mm,重复2次,可去除砂轮表面0.006mm的磨损层,恢复砂轮的锋利度。现代磨床多采用“自动修整”功能:系统通过扭矩传感器监测砂轮磨削扭矩,当扭矩超过预设阈值(如额定扭矩的120%)时,自动停止磨削,启动修整程序——修整器移动至砂轮位置,按预设参数完成修整后,自动返回原位,砂轮重新开始磨削。此外,部分磨床还具备“修整补偿”功能:修整后砂轮直径减小,系统自动补偿Z轴(砂轮进给轴)的位置,确保工件磨削尺寸不受砂轮直径变化影响(如砂轮直径减小0.01mm,Z轴自动向下补偿0.005mm,保证工件厚度精度)。扬州车床运动控制编程湖州磨床运动控制厂家。

运动控制器作为非标自动化运动控制的“大脑”,其功能丰富度与运算能力直接影响设备的控制复杂度与响应速度。在非标场景下,由于生产流程的多样性,运动控制器需具备多轴联动、轨迹规划、逻辑控制等多种功能,以满足不同动作组合的需求。例如,在锂电池极片切割设备中,运动控制器需同时控制送料轴、切割轴、收料轴等多个轴体,实现极片的连续送料、切割与有序收料。为确保切割精度,运动控制器需采用先进的轨迹规划算法,如S型加减速算法,使切割轴的速度变化平稳,避免因速度突变导致的切割毛刺;同时,通过多轴同步控制技术,使送料速度与切割速度保持严格匹配,防止极片拉伸或褶皱。随着工业自动化技术的发展,现代运动控制器已逐渐向开放式架构演进,支持多种工业总线协议,如EtherCAT、Profinet等,可与不同品牌的伺服驱动器、传感器等设备实现无缝对接,提升了非标设备的兼容性与扩展性。此外,部分运动控制器还集成了机器视觉接口,可直接接收视觉系统反馈的位置偏差信号,并实时调整运动轨迹,实现“视觉引导运动控制”,这种一体化解决方案在精密装配、分拣等非标场景中得到广泛应用,大幅提升了设备的自动化水平与智能化程度。
在非标自动化设备领域,运动控制技术是实现动作执行与复杂流程自动化的支撑,其性能直接决定了设备的生产效率、精度与稳定性。不同于标准化设备中固定的运动控制方案,非标场景下的运动控制需要根据具体行业需求、加工对象特性及生产流程进行定制化开发,这就要求技术团队在方案设计阶段充分调研实际应用场景的细节。例如,在电子元器件精密组装设备中,运动控制模块需实现微米级的定位精度,以完成芯片与基板的贴合,此时不*要选择高精度的伺服电机与滚珠丝杠,还需通过运动控制器的算法优化,补偿机械传动过程中的反向间隙与摩擦误差。同时,为应对不同批次元器件的尺寸差异,运动控制系统还需具备实时参数调整功能,操作人员可通过人机交互界面修改运动轨迹、速度曲线等参数,无需对硬件结构进行大规模改动,极大提升了设备的柔性生产能力。此外,非标自动化运动控制还需考虑多轴协同问题,当设备同时涉及线性运动、旋转运动及抓取动作时,需通过运动控制器的同步控制算法,确保各轴之间的动作时序匹配,避免因动作延迟导致的产品损坏或生产故障,这也是非标运动控制方案设计中区别于标准化设备的关键难点之一。杭州专机运动控制厂家。

为适配非标设备的特殊需求,编程时还需对G代码进行扩展:例如自定义G99指令用于点胶参数设置(设定出胶压力0.3MPa,出胶时间0.2s),通过宏程序(如#1变量存储点胶坐标)实现批量点胶轨迹的快速调用。此外,G代码编程需与设备的硬件参数匹配:如根据伺服电机的额定转速、滚珠丝杠导程计算脉冲当量(如导程10mm,编码器分辨率1000线,脉冲当量=10/(1000×4)=0.0025mm/脉冲),确保指令中的坐标值与实际运动距离一致,避免出现定位偏差。无锡钻床运动控制厂家。宿迁美发刀运动控制开发
铝型材运动控制厂家。嘉兴复合材料运动控制开发
非标自动化运动控制编程中的安全逻辑实现是保障设备与人身安全的,需通过代码构建“硬件+软件”双重安全防护体系,覆盖急停控制、安全门监控、过载保护、限位保护等场景,符合工业安全标准(如IEC61508、ISO13849)。急停控制编程需实现“一键急停,全域生效”:将急停按钮(常闭触点)接入PLC的安全输入模块(如F输入),编程时通过安全继电器逻辑(如SR模块)控制所有轴的使能信号与输出,一旦急停按钮触发,立即切断伺服驱动器使能(输出Q0.0-Q0.7失电),停止所有运动,同时锁定控制程序(禁止任何操作,直至急停复位)。安全门监控需实现“门开即停,门关重启”:安全门开关(双通道触点,确保可靠性)接入PLC的F输入I1.0与I1.1,编程时通过“双通道检测”逻辑(只有I1.0与I1.1同时断开,才判定安全门打开),若检测到安全门打开,则执行急停指令;若安全门关闭,需通过“复位按钮”(I1.2)触发程序重启,避免误操作。嘉兴复合材料运动控制开发

现代非标自动化运动控制中的安全控制已逐渐向智能化方向发展,通过集成安全PLC(可编程逻辑控制器)与安全运动控制器,实现安全功能与运动控制功能的深度融合。例如,安全运动控制器可实现“安全限速”“安全位置监控”等高级安全功能,在设备正常运行过程中,允许运动部件在安全速度范围内运动;当出现安全隐患时,可快速将运动速度降至安全水平,而非直接紧急停止,既保障了安全,又减少了因紧急停止导致的生产中断与设备冲击。此外,安全控制系统还需具备故障诊断与记录功能,可实时监测件的运行状态,当件出现故障时,及时发出报警,并记录故障信息,便于操作人员排查与维修,提升设备的安全管理水平。嘉兴石墨运动控制厂家。镇江铣床运动...
- 滁州专机运动控制 2026-04-03
- 合肥点胶运动控制 2026-04-03
- 滁州运动控制开发 2026-04-03
- 马鞍山铝型材运动控制 2026-04-03
- 扬州美发刀运动控制 2026-04-02
- 镇江铣床运动控制定制 2026-04-02
- 马鞍山铣床运动控制开发 2026-04-02
- 江苏美发刀运动控制定制开发 2026-04-02
- 盐城运动控制 2026-04-02
- 专机运动控制定制开发 2026-04-02
- 合肥非标自动化运动控制 2026-04-01
- 宁波玻璃加工运动控制定制 2026-03-31
- 上海碳纤维运动控制调试 2026-03-31
- 常州半导体运动控制定制开发 2026-03-31
- 泰州运动控制开发 2026-03-31
- 苏州义齿运动控制定制 2026-03-31



- 南京非标自动化数控系统定制 04-04
- 南通专机数控系统 04-04
- 宿迁木工数控系统开发 04-04
- 无锡丝网印刷数控系统调试 04-04
- 宿迁丝网印刷数控系统 04-04
- 无锡钻床数控系统调试 04-04
- 南通丝网印刷数控系统维修 04-03
- 镇江铣床运动控制 04-03
- 滁州专机运动控制 04-03
- 盐城义齿数控系统编程 04-03