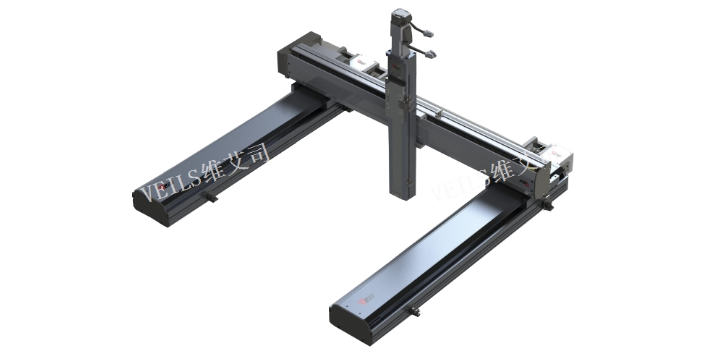
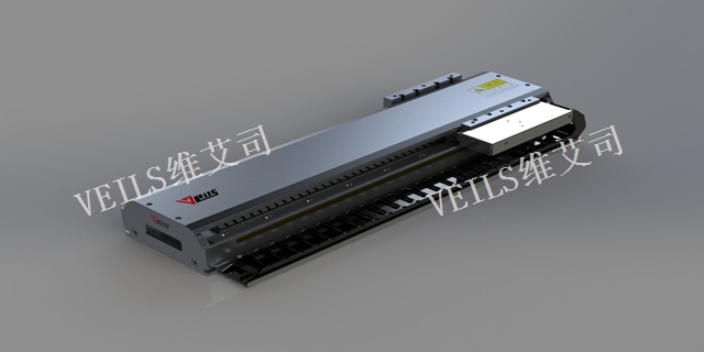
车能跑起来,靠的是四个轮胎的接地部分,故轮胎作为车辆的重要部件之一,不但关系到车辆的操控性能,还事关车上人员的生命健康。基于此,要减少交通的发生,就得立足源头管理,确保轮胎的可靠性。随着科技的飞速发展,线性马达加持的CCD视觉检测设备被轮胎制造企业用来检测轮胎表面的缺点,主要是将CCD视觉检测设备安装在以线性马达为驱动部件的滑台上,利用滑台等速移动的特性检查轮胎表面是否凹凸不平、破损等。可见,线性马达加持的CCD视觉检测设备可以减少交通的发生,提前预防确保人员安全。无铁芯线性马达定制就找苏州维艾司!常州搬运机器人线性马达
注意防磁及抗干扰。由于线性马达磁场是敞开的,金属灰尘、切屑粉末等磁性材料很容易被电机磁场吸住而妨碍正常工作,甚至损坏电机,因此应对其进行隔磁处理。另外还需要考虑机床冷却液、润滑油、电缆线等的防护,信号线屏蔽处理,负载干扰与系统控制问题。由于线性马达驱动系统没有中间传动环节,工件质量、切削力的变化等干扰直接作用于电机,同时,线性马达的边端效应也增加了系统控制难度,所以需要控制器具有较强抗干扰能力,且稳定性好。需解决发热问题。线性马达在工作状态下,由于线圈做功的能量损失,将产生很大热量,如果驱动部分空间较小,将使电机动子温度急剧增加,而动子一般处在机床导轨附近,过高的热量将引起机床导轨温度变化太大,致使导轨产生热变形,进而影响机床的工作精度。同时,动子的温升将引起内部线圈绕组电阻值的增大,如系统需要保持出力不变,必将需要更大的电流,而电流的增大同时伴有更多的能量损耗,使温度更加升高,从而形成恶性循环。因此,必须采取有效的冷却措施,将温度控制在合理范围内,保证电机正常使用。常州非标自动化线性马达加工苏州线性马达采购就找苏州维艾司!
线性马达支持的电磁弹射器与蒸汽弹射器相比,体积重量更小,可靠性更高,维护量更少,使用更加灵活,舰载机弹射范围更大,既能弹射重型战斗机,也能弹射轻小型无人机,因此电磁弹射器被认为是蒸汽弹射器理想的替代品。许多人可能感觉奇怪,为何看到线性马达就能说明国产第2艘航空母舰采用电磁弹射器,这是因为线性马达是电磁弹射器关键设备,它能够把电能直接转换成直线运动机械能,线性马达优点包括结构简单,重量和体积较低,定位精度高,系统灵敏高,这些优点对于舰载系统来说非常宝贵,美国福特级电磁弹射器就采用线性马达,相关资料,福特级航空母舰的电磁弹射器就采用了288个线性马达模块,长度大约110米,每个模块大小、重量相同,可以随意更换,所以我们看到线性马达就可以推测国产第2艘航空母舰采用了电磁弹射器。
线性马达是主要用在自动化设备上面的,磁悬浮列车是是一种交通工具,线性马达作为一种新型电机,近年来在我国的应用日益***.磁悬浮列车就是用线性马达来驱动的.磁悬浮列车是一种全新的列车.一般的列车,由于车轮和铁轨之间存在摩擦,限制了速度的提高,它所能达到的比较高运行速度不超过300km/n.磁悬浮列车是将列车用磁力悬浮起来,使列车与导轨脱离接触,以减小摩擦,提高车速。列车由线性马达牵引.线性马达的一个级固定于地面,跟导轨一起延伸到远处;另一个级安装在列车上.初级通以交流,列车就沿导轨前进.列车上装有磁体(有的就是兼用线性马达的线圈),磁体随列车运动时,使设在地面上的线圈(或金属板)中产生感应电流,感应电流的磁场和列车上的磁体(或线圈)之间的电磁力把列车悬浮起来.悬浮列车的优点是运行平稳,没有颠簸,噪声小,所需的牵引力很小,只要几千kw的功率就能使悬浮列车的速度达到550km/h。线性马达求购就找苏州尚恩格!
线性马达可以认为是旋转电机在结构方面的一种变形,它可以看作是一台旋转电机沿其径向剖开,然后拉平演变而成。随着自动控制技术和微型计算机的高速发展,对各类自动控制系统的定位精度提出了更高的要求,在这种情况下,传统的旋转电机再加上一套变换机构组成的直线运动驱动装置,已经远不能满足现代控制系统的要求,为此,世界许多国家都在研究、发展和应用线性马达,使得线性马达的应用领域越来越广,前景越来越广阔,相应的公司也越来越多。线性马达售后有保障!5轴线性马达加工
线性马达实力雄厚厂家!常州搬运机器人线性马达
对直线电机控制技术的研究基本上可以分为三个方面:一是传统控制技术,二是现代控制技术,三是智能控制技术。传统的控制技术如PID反馈控制、解耦控制等在交流伺服系统中得到了***的应用。其中PID控制蕴涵动态控制过程中的信息,具有较强的鲁棒性,是交流伺服电机驱动系统中基本的控制方式。为了提高控制效果,往往采用解耦控制和矢量控制技术。在对象模型确定、不变化且是线性的以及操作条件、运行环境是确定不变的条件下,采用传统控制技术是简单有效的。但是在高精度微进给的高性能场合,就必须考虑对象结构与参数的变化。各种非线性的影响,运行环境的改变及环境干扰等时变和不确定因素,才能得到满意的控制效果。因此,现代控制技术在直线伺服电机控制的研究中引起了很大的重视。常用控制方法有:自适应控制、滑模变结构控制、鲁棒控制及智能控制。主要是将模糊逻辑、神经网络与PID、H∞控制等现有的成熟的控制方法相结合,取长补短,以获得更好的控制性能。常州搬运机器人线性马达