就工业机械手双目视觉定位抓取系统进行了深入研究和实验设计。首先,文章简明介绍了双目视觉机器人的国内外研究现状和意义,并详细说明了机器人视觉系统的分类,分析了机器人视觉系统应用研究中存在的一些困难。然后对工业机械手的机械结构及空间坐标关系变换和运动学基础进行了简要描述。详细推导了摄像机的光学几何成像模...
视觉定位基本参数
- 品牌
- 尹尔斯
- 型号
- 尹尔斯
- 料斗类型
- 筒形料斗,等分线料斗,螺旋料斗,锥形料斗,线料斗
- 底盘类型
- 正拉底盘,压电式底盘,侧拉底盘,精密底盘
- 控制器类型
- 普通控制器,分极控制器,带缓启动控制器,调频控制器,数显调频控制器
视觉定位企业商机
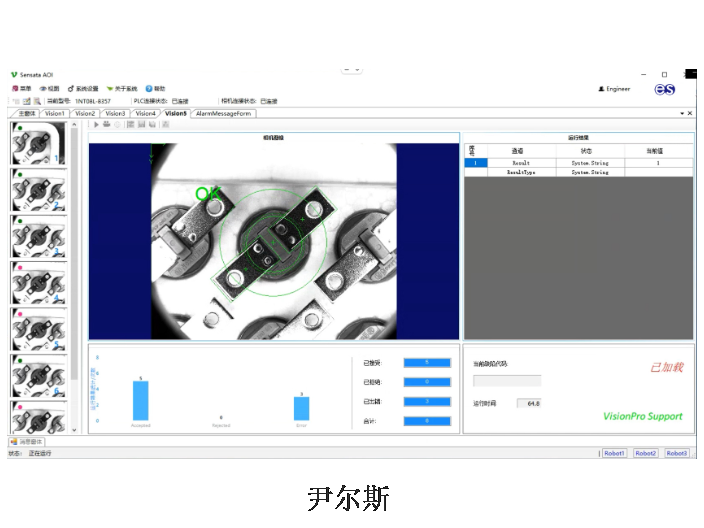
针对视觉定位问题,对比研究多种图像处理算法,综合使用平均值灰度化、高斯滤波和阈值分割的方法对图像进行预处理。采用Canny边缘检测算法和Harris角点检测算法对图像进行特征提取,利用图像的几何矩实现对目标工件的精细定位。使用实际采集的工件图像对上述算法进行实验测试。实验结果显示,算法检测效果较好,可实现对目标工件的精细定位。针对工业应用问题,利用视觉标定和图像处理等关键技术的算法原理,开发视觉定位抓取软件,结合硬件平台对系统进行整体性实验测试。实验结果显示,视觉定位的误差均值为2.484mm,相对误差均值为0.54%,机器人实际抓取的误差均值约为3.102mm,相对误差均值为0.56%。相比于传统工业机器人,本文设计的工业机器人视觉定位抓取系统在实际工作过程中相对误差更小,且系统的工作效率与智能化程度更高,能够满足柔性化产线的需求。视觉定位机器人市场前景怎么样?江西比较好的视觉定位费用
工业机器人作为现产制造领域重要的自动化装备,已被广泛应用于搬运、喷涂、焊接、装配等生产任务中。随着现产对机器人智能性和自主性要求的提高,工业机器人智能化应用已经成为当下机器人技术的研究热点。零件装配是生产过程中常见且重要的生产任务,研究一种适用于柔性生产单元轴孔自动化装配过程中的目标识别和视觉定位方法对提高工业机器人的智能化应用水平和生产效率等方面具有重要意义。因此,本文以一台六轴串联关节型工业机器人为研究对象,搭建了工业机器人目标识别和视觉定位实验平台,对工业机器人轴孔自动化装配过程中的视觉定位和自动控制问题进行了深入探讨。江西品质视觉定位你知道我们身边采用视觉定位技术的领域有哪些吗?
首先,介绍工业机器人视觉定位抓取系统组成。从一般机器视觉定位系统总体框架构成出发,研究了三种不同类型的机器视觉定位系统,并以满足实验和使用要求进行系统的总体设计,选择了搭建该系统的硬件组成及软件开发环境,介绍了系统的工作流程。其次,建立工业机器人视觉定位抓取系统参数化模型。研究坐标转换原理和工业机器人各连杆间的位姿变换,建立机器人抓取过程中的坐标转换关系。研究相机成像模型和机器人手眼模型,采用张正友标定法标定相机的内参数,构建工件图像的二维像素坐标到真实世界坐标的映射,通过Tasi两步法对手眼系统进行标定,建立从相机坐标系到机器人基坐标系间的转换关系。
视觉定位和导航算法是目前机器人研究的重点,也是大家都在研究的热点。在实际的各种使用场景中,对于视觉定位的需求也很大。但是国内一直没有比较成熟的视觉定位导航解决方案。我们终于成功实现了视觉定位的解决方案。现在的餐厅送餐机器人很多还在采用电磁或机械导轨的方式给机器人定位。这样的方法不仅改造起来成本很大,维护成本也很大,同时对餐厅的整体装潢也有很大影响。采用视觉定位算法之后,就不需要任何导轨来辅助定位了。机器人有了真正能够使用的眼睛。同样工业上的AGV机器人也可以采用视觉定位的方式给机器人提供更精细的坐标。工业机器人视觉定位。
研究用于水下焊接机器人的水下双目视觉定位系统,可以为机器人提供缺陷或破裂处的三维坐标,并转换成机器人坐标系的坐标,相当于机器人的“眼睛”,为机器人的运动指引方向。安装有视觉定位系统的水下焊接机器人,可以通过遥控操作的方式完成水下焊接,使人不用在苛刻的水下环境或危险环境中进行焊接工作,减少了劳动强度。相对于陆地上的双目视觉定位系统,水下双目视觉定位系统的工作环境更加复杂,且定位精度会受到水环境的影响,因此需要在陆地双目视觉定位系统的基础上研究水下环境对视觉系统的影响,并消除或减弱这种影响,提高定位精度。本文从硬件和软件两方面对水下双目视觉系统进行了设计和研究。视觉定位机器人组装清单。安徽智能视觉定位
视觉定位的优势来自于哪里。江西比较好的视觉定位费用
视觉定位主要通过相机视觉信息与环境视觉特征的匹配实现位置计算。然而视觉匹配计算量较大,难以支持室内连续定位。对于视觉数据稀疏的环境,单纯依靠视觉匹配也难以实现连续的轨迹定位。针对这一问题,本文提出一种结合感知哈希与空间约束的室内连续视觉定位方法,通过智能手机采集的连续视频帧与室内图像数据集的匹配,实现精确的视觉定位。为改进视觉匹配效率,构建了一种双层次的匹配图像搜索策略,包括基于感知哈希方法的全局搜索策略和顾及运动连续性的局部搜索策略。在此基础上,设计了一种室内连续视觉定位算法,结合视觉匹配与航位推算提高视觉定位的空间连续性,并利用运动恢复结构方法提高航向角估计精度。试验结果表明,本文方法在图像匹配定位、连续离线定位、连续在线定位模式下的平均定位误差分别为0.70、0.86和0.93m,能够达到亚米级定位精度。江西比较好的视觉定位费用
尹尔斯工业智能科技(南京)有限公司是以提供柔性振动盘,激光打标机,机器视觉应用,自动上下料系统为主的私营有限责任公司,公司始建于2019-04-10,在全国各个地区建立了良好的商贸渠道和技术协作关系。尹尔斯工业致力于构建机械及行业设备自主创新的竞争力,多年来,已经为我国机械及行业设备行业生产、经济等的发展做出了重要贡献。
与视觉定位相关的文章
重庆多功能视觉定位要多少钱
- 山东视觉定位报价行情 2023-11-06
- 山西比较好的视觉定位优势 2023-11-04
- 天津比较好的视觉定位 2023-11-04
- 安徽自动视觉定位推荐厂家 2023-11-03
- 河北本地视觉定位 2023-11-03
- 陕西购买视觉定位费用 2023-11-02
- 河南微型视觉定位优势 2023-11-02
- 吉林办公用视觉定位能耗制动 2023-11-01
- 浙江使用视觉定位 2023-11-01
- 北京微型视觉定位功率 2023-10-31
- 四川智能视觉定位市场价 2023-10-31
- 陕西微型视觉定位类型 2023-10-30
与视觉定位相关的产品

与视觉定位相关的新闻
-
云南加工视觉定位价格表格 2023-10-27 02:08:37ccd视觉定位由于数字图像处理和计算机视觉技术的迅速发展,越来越多的研究者采用摄像机作为全自主用移动机器人的感知传感器。这主要是因为原来的超声或红外传感器感知信息量有限,鲁棒性差,而视觉系统则可以弥补这些缺点。ccd视觉定位算法:基于滤波器的定位算法主要有KF、SEIF、PF、EKF、UKF等。也可...
-
四川比较好的视觉定位价格表格 2023-10-26 06:08:33视觉系统介绍:1。视觉识别的准确度可达。2.同轴视觉成像,所见即所得,可随振动透镜的偏转而偏转,实时观察加工情况。3.自动对焦,3秒内完成自动对焦,无需手动调整。4.视觉自动定位可实现对0~99种不同特性、不同数量的不同类型产品的自动识别、自动抓取,并自动对应打标。打标机视觉定位系统的特点1...
-
河北哪里有视觉定位功率 2023-10-26 12:07:58视觉定位系统应用机器视觉辅助激光加工可以保证划片规格的准确性和均匀性,提高精度和效率。布标/皮革切割打标机器视觉辅助激光设备用于布标/皮革切割,通过视觉系统快速搜索和定位布标和皮革在整个织物上的位置,控制激光头进行精确切割,克服柔性变形。机器视觉辅助激光设备进行皮革激光打标,视觉引导激光...
-
吉林微型视觉定位费用 2023-10-25 04:09:40针对复杂场景中,特别是复杂光照条件下,视觉定位算法容易失效的问题,本文提出了基于生成对抗网络的视觉信息预处理算法,不仅可以将黑夜场景中的驾驶环境转换为白天可见场景,而且通过在模型中加入基于语义的损失函数,有效的保证转换前后两组图像语义的一致性。针对视觉定位中会产生累积误差且累积误差无法消除的问题,本...
与视觉定位相关的问题
与视觉定位相关的标签
新闻资讯
产品推荐
-

湖北购买自动上下料
2023-11-11 -

湖南自动化自动上下料功率
2023-11-10 -
江苏本地柔性振动盘优势
2023-11-10 -

河北使用柔性振动盘能耗制动
2023-11-09 -
湖南办公用柔性振动盘报价
2023-11-09 -
江苏购买激光打标
2023-11-08 -

山西多功能机器人自动抓取报价
2023-11-08 -
重庆多功能视觉定位要多少钱
2023-11-07 -
黑龙江小型柔性振动盘能耗制动
2023-11-07