就工业机械手双目视觉定位抓取系统进行了深入研究和实验设计。首先,文章简明介绍了双目视觉机器人的国内外研究现状和意义,并详细说明了机器人视觉系统的分类,分析了机器人视觉系统应用研究中存在的一些困难。然后对工业机械手的机械结构及空间坐标关系变换和运动学基础进行了简要描述。详细推导了摄像机的光学几何成像模...
视觉定位基本参数
- 品牌
- 尹尔斯
- 型号
- 尹尔斯
- 料斗类型
- 筒形料斗,等分线料斗,螺旋料斗,锥形料斗,线料斗
- 底盘类型
- 正拉底盘,压电式底盘,侧拉底盘,精密底盘
- 控制器类型
- 普通控制器,分极控制器,带缓启动控制器,调频控制器,数显调频控制器
视觉定位企业商机
近年来,有着30多年研究历史的视觉定位与建图技术发展十分迅速,相关成果被用于机器人、混合现实与自动驾驶等领域。视觉定位与建图技术不仅能实时推算传感器自身的运动,还能构建三维地图。此外,视觉定位与建图技术不依赖外部定位系统,能工作在未知环境中。因此,视觉定位与建图成为了无人自主系统的关键技术之一。在本文中,视觉定位与建图技术主要指视觉里程计(Visual Odometry,简称VO)与基于视觉的同时定位与建图(Visual Simultaneous Localization and Mapping,简称视觉 SLAM)。视觉定位机器人组装清单。辽宁使用视觉定位功率

针对机器人贴标系统对圆钢端面中心X、Y坐标与Z坐标测量精度要求的不同,提出了主辅眼视觉定位方法。设置主相机与辅相机,采用小二乘法识别圆钢端面并拟合圆,主相机运用三角形内插值法标定求出较为精确的X、Y坐标,主、辅相机组成双目视觉系统运用张正友标定法进行二次标定获得主辅相机的内外参,通过形心匹配求视差值,再利用三角测距原理求出Z坐标。实验结果表明,主辅眼视觉定位方法求取的圆钢端面中心的X、Y坐标精度可达到±1mm以内,Z坐标精度可达到±5mm以内,能够满足圆钢端面机器人自动贴标的位置精度要求。浙江微型视觉定位视觉定位在汽配行业的可追溯性应用。
cd视觉定位由于数字图像处理和计算机视觉技术的迅速发展,越来越多的研究者采用摄像机作为全自主用移动机器人的感知传感器。这主要是因为原来的超声或红外传感器感知信息量有限,鲁棒性差,而视觉系统则可以弥补这些缺点。ccd视觉定位算法:基于滤波器的定位算法主要有KF、SEIF、PF、EKF、UKF等。也可以使用单目视觉和里程计融合的方法。以里程计读数作为辅助信息,利用三角法计算特征点在当前机器人坐标系中的坐标位置,这里的三维坐标计算需要在延迟一个时间步的基础上进行。
在小范围复杂的室内环境下,由于视觉信息具有灵活方便获取的优点,视觉定位系统可以利用室内场景视觉信息用于室内定位。本文分析了视觉定位技术的研究目的意义和国内外关于室内定位技术以及视觉定位技术的研究现状,研究了视觉定位系统中关于图像检索和对极几何约束关系的相关理论知识。在此基础上,本文完成了以下研究:(1)针对于传统的视觉定位系统数据库建立方法时间开销过大,难以满足快速建立数据库或者快速更新数据库的需求的问题,本文提出了基于视频流的数据库快速建立方法,该方法可以有效降低数据库建立和更新的复杂度。视觉定位定位不了是什么原因。

从工业机器人的视觉定位问题出发,通过深入研究视觉定位技术的成果,提出了一种基于模板匹配的计算机视觉定位技术的软件设计方法,归纳出模板匹配定位、位姿计算的软件求解方法。在图像预处理环节,采用均值滤波的改进算法、分段线性变换的对比度增强算法以及Canny边缘检测的改进算子;为了提高边缘检测的效果,弥补现有边缘检测算子对弱边缘检测的不足,又提出了采用分段累积搜索算子进行弱边缘的跟踪和连接;通过对现今各模板匹配方法的深入研究,提出了基于图像金字塔结构的Hausdorff距离匹配的改进算法,在构建图像金字塔的同时加入带旋转的模板匹配;,通过仿射变换和坐标系变换计算出目标物在世界坐标系下的空间坐标,从而引导工业机器人自主完成目标物的准确抓取。 给出了视觉定位系统的软件设计方法,分析了系统功能模块的结构关系,开发了基于计算机视觉定位技术的软件系统,实现了基于模板匹配的目标物位置和角度的精确计算。工业现场的大量实验表明,该系统可以快速准确的实现场景内目标物的抓取任务,具有很好的稳定性、实用性,兼具理论意义和应用价值。视觉定位定位效果不准确怎么办。吉林多功能视觉定位优势
视觉定位应用在什么材料上。辽宁使用视觉定位功率
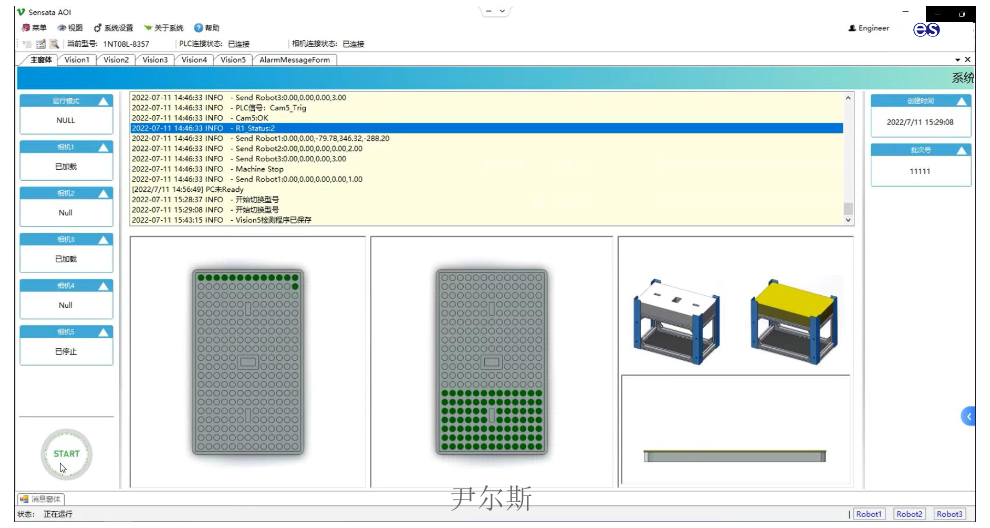
在借助机器视觉定位技术对机器人进行引导前,需要对相机坐标系和机器人完成标定,建议使用“三点自动标定”方式,对机器人进行标定操作,同时设置标定工件的自动模板,进而为后续机器视觉定位技术控制和引导机器人系统操作提供技术支持。在运行工位模块时,需要借助可编程的PLC控制器单元,结合锂电池载流片系统对机器人系统中气缸、伺服电机、传感器等装置完成上料操作。同时,工业相机可以采集上料后锂电池载流片的图像,并分析处理图像,实现特征识别、模块匹配、定位计算物料、确定目标位置,进而将数据传输至机器人系统中,使机器人可以对锂电池载流片完成科学的取放工作。辽宁使用视觉定位功率
与视觉定位相关的文章
重庆多功能视觉定位要多少钱
- 山东视觉定位报价行情 2023-11-06
- 山西比较好的视觉定位优势 2023-11-04
- 天津比较好的视觉定位 2023-11-04
- 安徽自动视觉定位推荐厂家 2023-11-03
- 河北本地视觉定位 2023-11-03
- 陕西购买视觉定位费用 2023-11-02
- 河南微型视觉定位优势 2023-11-02
- 吉林办公用视觉定位能耗制动 2023-11-01
- 浙江使用视觉定位 2023-11-01
- 北京微型视觉定位功率 2023-10-31
- 四川智能视觉定位市场价 2023-10-31
- 陕西微型视觉定位类型 2023-10-30
与视觉定位相关的产品
与视觉定位相关的新闻
-
云南加工视觉定位价格表格 2023-10-27 02:08:37ccd视觉定位由于数字图像处理和计算机视觉技术的迅速发展,越来越多的研究者采用摄像机作为全自主用移动机器人的感知传感器。这主要是因为原来的超声或红外传感器感知信息量有限,鲁棒性差,而视觉系统则可以弥补这些缺点。ccd视觉定位算法:基于滤波器的定位算法主要有KF、SEIF、PF、EKF、UKF等。也可...
-
四川比较好的视觉定位价格表格 2023-10-26 06:08:33视觉系统介绍:1。视觉识别的准确度可达。2.同轴视觉成像,所见即所得,可随振动透镜的偏转而偏转,实时观察加工情况。3.自动对焦,3秒内完成自动对焦,无需手动调整。4.视觉自动定位可实现对0~99种不同特性、不同数量的不同类型产品的自动识别、自动抓取,并自动对应打标。打标机视觉定位系统的特点1...
-
河北哪里有视觉定位功率 2023-10-26 12:07:58视觉定位系统应用机器视觉辅助激光加工可以保证划片规格的准确性和均匀性,提高精度和效率。布标/皮革切割打标机器视觉辅助激光设备用于布标/皮革切割,通过视觉系统快速搜索和定位布标和皮革在整个织物上的位置,控制激光头进行精确切割,克服柔性变形。机器视觉辅助激光设备进行皮革激光打标,视觉引导激光...
-
吉林微型视觉定位费用 2023-10-25 04:09:40针对复杂场景中,特别是复杂光照条件下,视觉定位算法容易失效的问题,本文提出了基于生成对抗网络的视觉信息预处理算法,不仅可以将黑夜场景中的驾驶环境转换为白天可见场景,而且通过在模型中加入基于语义的损失函数,有效的保证转换前后两组图像语义的一致性。针对视觉定位中会产生累积误差且累积误差无法消除的问题,本...
与视觉定位相关的问题
与视觉定位相关的标签
新闻资讯
产品推荐
-

湖北购买自动上下料
2023-11-11 -

湖南自动化自动上下料功率
2023-11-10 -
江苏本地柔性振动盘优势
2023-11-10 -

河北使用柔性振动盘能耗制动
2023-11-09 -
湖南办公用柔性振动盘报价
2023-11-09 -
江苏购买激光打标
2023-11-08 -

山西多功能机器人自动抓取报价
2023-11-08 -
重庆多功能视觉定位要多少钱
2023-11-07 -
黑龙江小型柔性振动盘能耗制动
2023-11-07