电子与通讯领域MBD的优势体现在缩短开发周期、提升系统可靠性与简化复杂协议验证上。在5G基带开发中,通过图形化建模可将复杂的信号处理算法分解为模块化模型,工程师能专注于调制解调、信道编码等逻辑设计,通过早期仿真发现算法缺陷,减少后期硬件测试的调试成本,使开发周期缩短。通讯协议栈验证方面,MBD支持协...
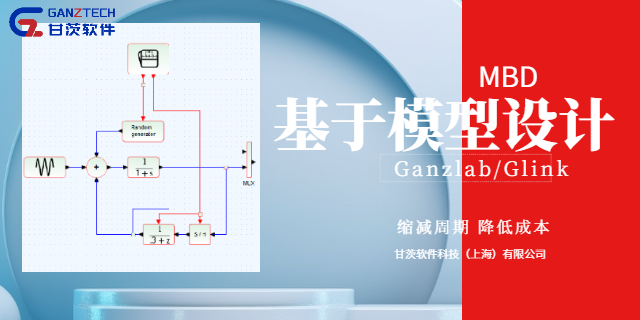
基于模型设计(MBD)基本参数
- 品牌
- Ganztech
- 型号
- MBD建模
- 软件类型
- 仿真建模软件
- 版本类型
- 网络版
- 语言版本
- 简体中文版
基于模型设计(MBD)企业商机
汽车领域基于模型设计(MBD)的优势体现在需求可视化、早期验证与团队协作效率提升三个方面。需求可视化层面,MBD能将“急加速时换挡平顺性”等抽象功能需求转化为可执行图形化模型,通过状态机、数据流图等元素直观呈现控制逻辑,降低需求歧义性,便于开发团队与需求方达成共识。早期验证方面,MBD支持开发全过程的仿真验证,从模型在环到硬件在环,各阶段可发现逻辑错误、硬件接口不匹配等不同层面问题,避免缺陷流入量产阶段,据统计采用MBD可使汽车电子控制器现场故障率降低半数以上。团队协作上,MBD采用标准化模型格式与开发流程,电子、机械、软件等专业工程师可基于同一模型开展工作,如自动驾驶系统开发中,感知算法团队与执行器控制团队通过模型接口共享数据,减少跨专业沟通成本;模型版本管理机制便于追踪修改记录,提升团队协作效率。汽车控制器软件MBD好用的软件,需支持图形化建模与自动代码生成,适配多类控制器开发。天津基于模型设计全流程解决方案
飞行器控制系统设计MBD国产平台在姿态控制、飞控算法验证等方面展现出自主可控的技术优势。平台需支持飞行器模型搭建,能精确计算气动参数、质量特性对姿态的影响,模拟俯仰、横滚、偏航等运动的动态响应。针对无人机与低空经济应用,平台应提供模块化的飞控算法模块(如PID控制、模型预测控制),支持自主导航、避障等功能的可视化建模,验证控制逻辑在复杂空域环境中的有效性。国产平台的优势在于适配国内飞行器研发的技术标准与应用场景,提供符合适航要求的模型验证工具,支持需求追溯与测试覆盖率分析。同时,具备良好的二次开发接口,允许用户集成自主研发的控制算法,保护重点技术,且本地化技术支持团队能快速响应定制化需求,为飞行器控制系统的自主研发提供可靠支撑。杭州需求分析MBD的数字化设计平台MBD开发公司好不好,看能否提供全流程支持,保障建模、仿真与部署顺畅协同,满足多样需求。
智能交通系统基于模型设计的好用软件,需具备交通流建模、信号控制逻辑仿真等功能。在交通流量预测模块,应能整合历史车流量数据与实时路况信息,构建宏观交通流模型,准确计算不同时段的道路通行能力,为信号配时优化提供数据支撑。针对智能路口控制,软件需支持信号灯相位切换逻辑的可视化建模,模拟不同配时方案下的车辆延误时间,通过对比分析选出合理控制策略。车路协同仿真功能也不可或缺,能搭建车辆与路侧设备的通信模型,验证信息交互延迟对协同决策的影响,确保自动驾驶车辆在复杂交通场景中的响应可靠性。好用的软件还应具备开放的模型接口,可与交通监控系统、车辆导航平台的数据对接,实现仿真结果与实际交通状况的动态校准,提升模型对智能交通系统设计的指导价值。
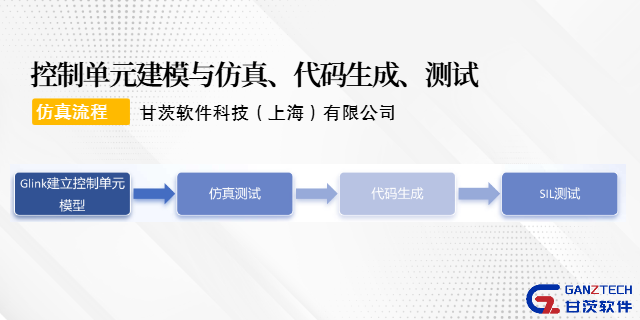
汽车控制器软件基于模型设计(MBD)是将控制逻辑以图形化模型形式表达的开发方法,贯穿从需求分析到代码生成的全流程。在发动机控制器ECU开发中,工程师可通过搭建燃油喷射、点火控制的可视化模型,直观呈现不同转速下的控制策略,避免传统手写代码的逻辑漏洞。整车控制器VCU开发中,MBD能整合动力系统参数,构建能量分配策略模型,模拟不同驾驶模式下的扭矩输出与能量回收效果,通过模型仿真提前验证控制逻辑的合理性。对于域控制器等复杂系统,MBD支持模块化建模,各功能模块可单独开发与测试,再通过模型集成验证模块间的交互逻辑,减少系统级缺陷。这种方法还支持早期虚拟测试,在物理样机制作前通过模型在环(MIL)仿真发现设计问题,大幅缩短开发周期,同时为后续的软件在环(SIL)、硬件在环(HIL)测试奠定基础,确保控制器软件的可靠性。车载通信系统借助MBD方法建模,能模拟不同路况下的通信情况,有效提升系统运行的稳定性。
选择自动驾驶基于模型设计开发公司时,要考察其技术储备的全面性与项目落地的实际能力,确保能覆盖感知到控制的完整链条。公司需有成熟的L2+级以上辅助驾驶开发案例,能搭建高保真的传感器模型库,其中包括摄像头的图像采集、激光雷达的点云生成模型,可模拟阴天、隧道等复杂环境下的感知效果,进而优化多传感器融合算法,提升环境识别的准确性。决策模块开发方面,需具备构建多样化交通场景模型的能力,能复现加塞、交叉路口会车等真实场景,测试车道居中、自动泊车等功能的决策逻辑,确保算法应对复杂路况时的安全性。公司须熟悉ISO26262功能安全标准,能将安全要求融入从需求定义到硬件在环(HIL)测试的每个环节,提供全流程的合规性保障。实用的应用层软件开发系统建模软件,可融合控制逻辑与仿真验证,建模过程中能实时查看效果。杭州需求分析MBD的数字化设计平台
能源装备开发MBD服务价格,需结合建模复杂度与仿真深度,合理定价且保障服务质量。天津基于模型设计全流程解决方案
车载通信系统建模聚焦于车内各类网络的信号传输逻辑与可靠性验证,覆盖CAN/LIN总线、车载以太网等多种通信方式。CAN总线建模需定义报文ID、数据长度与传输周期,通过构建总线调度模型,计算不同节点(如发动机ECU、ABS控制器)的报文发送错误概率,优化总线负载率以确保关键信号(如制动指令)的实时性。LIN总线建模针对车身电子等低速率场景,模拟主从节点的通信协议,验证灯光、雨刮等控制信号的传输延迟,避免因通信延迟导致的功能异常。车载以太网建模则需考虑高带宽需求,构建通信协议栈模型,仿真自动驾驶多传感器(激光雷达、摄像头)的海量数据传输过程,分析网络拥塞对数据同步的影响。建模过程需整合通信硬件特性(如传输速率、抗干扰能力),通过仿真模拟电磁干扰、线束阻抗变化等工况,验证通信系统的容错能力,确保车内信号传输的稳定性与安全性。天津基于模型设计全流程解决方案
与基于模型设计(MBD)相关的文章
海南汽车系统建模优势有哪些
- 湖北自动代码生成系统建模的数字化设计平台 2026-05-14
- 北京需求分析MBD优势有哪些 2026-05-13
- 上海应用层软件开发MBD 2026-05-11
- 广东应用层软件开发系统建模有什么用途 2026-05-10
- 乌鲁木齐自动代码生成基于模型设计哪个软件性价比高 2026-04-24
- 湖南需求分析MBD哪个软件性价比高 2026-04-23
- 湖南汽车控制器软件系统建模市场报价 2026-04-23
- 海南智能MBD优势有哪些 2026-04-21
- 沈阳自动驾驶MBD什么品牌好 2026-04-20
- 上海需求分析系统建模好用的软件 2026-04-18
- 图形化建模基于模型设计哪个软件性价比高 2026-04-14
- 江苏智能MBD优势有哪些 2026-04-14
与基于模型设计(MBD)相关的产品

与基于模型设计(MBD)相关的新闻
-
山东自动代码生成基于模型设计有什么用途 2026-04-05 06:03:32算法原型工程化转化基于模型设计国产平台需架起理论算法与实际应用的桥梁,支持算法模型的模块化封装与代码生成。平台应能将控制算法、信号处理算法等原型转化为可执行的模型,通过仿真验证算法在实际工况下的性能,如工业控制中的PID算法、新能源汽车中的电池均衡算法,经平台转化后可直接生成适配目标硬件的代码,减少...
-
湖南图形化建模MBD哪个开发公司靠谱 2026-03-31 06:03:49智能MBD好用的软件需具备自适应建模、智能算法集成与自动化仿真的特性,适用于复杂系统的高效开发。在模型构建阶段,软件能通过机器学习算法分析历史数据,自动生成初步的系统模型框架(如根据设备运行数据构建近似的动力学模型),减少人工建模工作量。智能算法集成方面,支持将神经网络、强化学习等智能控制算法模块无...
-
杭州工业控制MBD的开发优势 2026-03-31 01:03:35汽车控制器软件MBD好用的软件需具备符合行业标准的建模环境与全流程支持能力。功能上,应支持基于AUTOSAR标准的模块化建模,提供丰富的汽车控制算法库(如发动机控制、底盘控制模块),便于快速搭建ECU、VCU等控制器的软件架构。代码生成能力至关重要,需能支持代码与模型的双向追溯,确保一致性。测试验证...
-
银川智能MBD什么品牌好 2026-03-29 10:04:06车载通信系统建模聚焦于车内各类网络的信号传输逻辑与可靠性验证,覆盖CAN/LIN总线、车载以太网等多种通信方式。CAN总线建模需定义报文ID、数据长度与传输周期,通过构建总线调度模型,计算不同节点(如发动机ECU、ABS控制器)的报文发送错误概率,优化总线负载率以确保关键信号(如制动指令)的实时性。...
与基于模型设计(MBD)相关的问题
与基于模型设计(MBD)相关的标签
新闻资讯
产品推荐
-
长春电机控制汽车仿真测试软件
2026-07-02 -

杭州控制器算法有哪些开发公司
2026-07-01 -

银川控制算法
2026-07-01 -

安徽电池系统汽车仿真外包服务
2026-06-30 -
上海底盘控制仿真验证解决方案提供商
2026-06-30 -

杭州自动化生产逻辑算法软件厂家
2026-06-29 -

浙江整车制动性能汽车仿真控制工具
2026-06-29 -

北京神经网络智能控制算法
2026-06-28 -

广东整车动力性能汽车仿真控制工具
2026-06-28