- 品牌
- 丰烨
- 型号
- 升降横移、平面移动、垂直升降、简易升降、垂直循环
两个前轮固定块17分别与两个车前轮8相配合,两个后轮固定块16分别与两个车后轮7相配合,两个三角斜板6分别与两个车后轮7相接触,载车板1的顶部固定安装有前挡板9,前挡板9与两个车前轮8相接触,通过两个前轮固定块17对两个车前轮8进行夹持,两个后轮固定块16对两个车后轮7进行夹持,防止车侧移。本实施例中,转动杆12的外侧固定套设有两个齿轮14,两个齿轮14分别位于对应的两个滑槽11内,两个滑板15的底部均固定安装有齿条18,两个齿条18分别与两个齿轮14相啮合,通过转动杆12带动两个齿轮14转动,通过两个齿轮14的转动带动两个齿条18移动,两个齿条18带动两个滑板15移动。本实施例中,位于车后轮7和车前轮8一侧的两个滑板15的一侧均开设有一螺纹槽21,两个一螺纹槽21内均螺纹安装有螺杆20,位于车后轮7和车前轮8另一侧的两个滑板15上均开设有第二螺纹槽,一螺纹槽21与第二螺纹槽内的螺纹旋向相反,两个螺杆20分别与两个第二螺纹槽螺纹连接,两个滑板15带动一个后轮固定块16和一个前轮固定块17移动,两个滑板15的移动使两个螺杆20转动,由于两个一螺纹槽21与两个第二螺纹槽的螺纹旋向相反,所以两个螺杆20的转动使另外两个滑板15朝着与前两个滑板15相反的方向移动。你要是需要这些的话都是可以在这里选购的。因为能为你节约不少的资金呢。西安两层升降横移立体停车设备

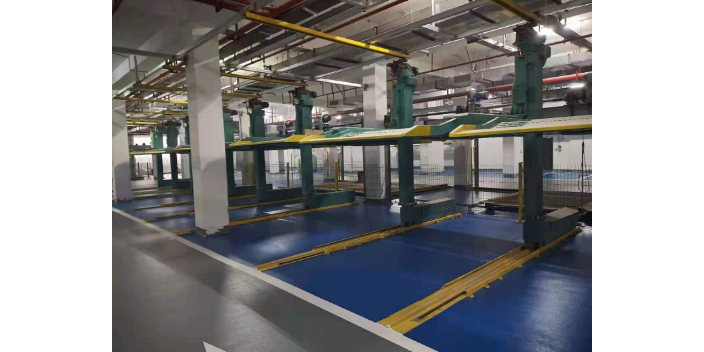
油缸4固定连接在底板21的操作面且油缸4的伸缩端与链条5对应,油缸4采用顶升油缸4,设备通过油缸4对链条5进行顶升,链条5顶升带动滑台1上下升降,此油缸4顶升链条5的技术为现有公知技术,在此不做赘述,滑台1的操作面通过螺栓与上车台3固定连接。上车台3由边梁31和波浪板32组成,边梁31与滑台1通过螺栓固定连接,边梁31的左右两侧均向地面倾斜,边梁31的中空部分通过多个波浪板32进行填充,边梁31配合波浪板32在相同载重量的情况下重量更轻,大量减少设备的整体重量,在进行维修和安装时更为方便,上车台3的左右两侧呈一定倾斜角度,方便汽车从上车台3的两侧驶入上车台3。锁紧装置的数量为多个,多个锁紧装置均匀固定连接在支撑柱22上,锁紧装置为现有公知技术,在此不做赘述,汽车驶入上车台3后油缸4启动使滑台1提升,将汽车提起后通过锁紧装置将滑台1的位置进行锁定,防止滑台1坠落。支撑柱22的高度为3296厘米,上车台3的尺寸为长度为4262厘米、宽度2620厘米,该尺寸根据停车的需要进行紧密计算,保证使用性和稳定性的同时很大程度的减少了设备的重量和占地面积,安装维护方便。2层升降横移停车设备生产厂家同时汽车停放会存在靠边的情况,容易造成汽车后视镜超出安全停放位置的现象。
防坠挂钩30还是保持挂设在防坠座50,实现平层与防坠功能。只有在控制电机20驱动输出杆21移动并使自锁连杆40切换至可移动位40b时,自锁连杆40才能移动,并让防坠挂钩30分离于防坠座50,实现升降轿厢200的移动。在本实用新型另一实施例中,控制电机20安装于安装底座10。在装配时,直接把安装底座10安装于升降轿厢200即可,容易装配。在本实用新型另一实施例中,控制电机20可以为步进电机或其它控制电机20,便于准确控制输出杆21的位移。具体地,在控制电机20为直线步进电机时,输出杆21输出直线位移。采用步进电机后,通过脉冲信号对步进电机精细控制,从而实现对行程的精确控制,让自锁连杆40在自锁位40a与可移动位40b之间可靠切换。在本实用新型另一实施例中,输出杆21与自锁连杆40之间通过一销轴61枢接;自锁连杆40与防坠挂钩30之间通过第二销轴62枢接。采用销轴穿过两个结构件,实现两个结构件枢接与力的传递。在控制电机20输出杆21移动时,自锁连杆40与防坠挂钩30跟随移动,使防坠挂钩30打开和关闭,保证开闭运作的可靠性,实现了对防坠挂钩30打开与关闭动作的高精度控制。在本实用新型另一实施例中,安装底座10连接有固定板70,防坠挂钩30枢接于固定板70。
转动杆12的另一端延伸至电机腔内,电机腔的一侧内壁上通过焊接固定安装有电机10,电机10的输出轴与转动杆12延伸至电机腔内的一端相焊接。电机10的型号为m5140-002。本实施例中,四个滑槽11内均滑动安装有滑板15,四个滑板15中靠近转动轴3的两个滑板15的顶部均通过焊接固定安装有后轮固定块16,四个滑板15中的另外两个滑板15的顶部均通过焊接固定安装有前轮固定块17,载车板1的顶部设有两个车前轮8和两个车后轮7,两个前轮固定块17分别与两个车前轮8相配合,两个后轮固定块16分别与两个车后轮7相配合,两个三角斜板6分别与两个车后轮7相接触,载车板1的顶部通过焊接固定安装有前挡板9,前挡板9与两个车前轮8相接触,通过两个前轮固定块17对两个车前轮8进行夹持,两个后轮固定块16对两个车后轮7进行夹持,防止车侧移。本实施例中,转动杆12的外侧固定套设有两个齿轮14,两个齿轮14分别位于对应的两个滑槽11内,两个滑板15的底部均通过焊接固定安装有齿条18,两个齿条18分别与两个齿轮14相啮合,通过转动杆12带动两个齿轮14转动,通过两个齿轮14的转动带动两个齿条18移动,两个齿条18带动两个滑板15移动。本实施例中。升降穿越立体机械车位。

尺寸不太合适,有的大型车根本停不进去。我以前停车经常被蹭,现在都不敢再停在机械车位上了。"居民王女士指着刚刚停入机械车位的一辆车说,很多车都是勉强才停进去,很是考验车技,一般的车主都不太敢冒风险,每天至少闲置几十个车位。早先建成的机械车位,因为尺寸问题,车主们换新车后有位难停。可是,对于新建的机械车位,车主们也存在困惑。有市民向12345热线反映,自己事先并不知道小区新建的机械车位尺寸,直到运行后,才发现车辆停不进去。顺义区的孙先生在小区正式交房前,就与开发商签订了机械车位租赁合同,然而,合同中并没有明确车位具体尺寸。直到机械车位启用的时候,孙先生才发现停车位不够大,因为高度问题,家里的SUV无法停放。另外,还有市民建议,小区在新建机械车位的时候,可以考虑将尺寸设计得大一点儿。丰台区的谭先生说,小区为解决停车难的问题,准备新建立体车位,不过,物业表示,机械车位会按照十多年前的规划来设计,满足普通标准轿车停放的尺寸。"大点儿的SUV肯定停不进去,车位为什么就不能建得大一些?过去的设计标准是不是过时了?"无人值守的技术更加方便,识别车辆,快速通过,节约了人力成本。新疆垂直升降式智能停车设备价格多少
一方面工作人员工作量减少,另一方面钱往来也很明显。西安两层升降横移立体停车设备
不会触发检测信号,扭簧为限位撞针提供复位的趋势力,钢丝绳一旦松弛,抵紧限位撞针的力不在存在,限位撞针在扭簧的作用力下复位,角度发生变化,即触发了检测信号,及时控制升降传动机构停止。进一步地,所述角度a为60°~90°,在该角度范围内,后吊点防松检测装置的检测为灵敏。进一步地,所述的前吊点防松检测装置包括支座一、摆臂、滚轮、支座二和限位开关;所述支座一和支座二相邻设置在移动框架顶面;所述摆臂一端和支座一铰接,另一端转动式连接有滚轮;所述滚轮置于连接前吊点的钢丝绳上;所述限位开关固定连接在支座二上,所述限位开关的触发端位于摆臂下落的路径上。滚轮置于钢丝绳上,通过滚轮使摆臂保持静止状态,在载车板升降时,滚轮与钢丝绳之间为滚动摩擦,不至于增大摩擦力而影响寿命,只要钢丝绳保持张紧状态,摆臂的运动状态就不会发生变化,当钢丝绳松弛后,钢丝绳不再支撑滚轮,也就不再保持摆臂的位置状态,摆臂在重力作用下一端下落,由于限位开关的触发端位于摆臂下落的路径上,因此摆臂下落必然会触碰到触发端,从而触发信号控制升降传动机构及时停止进一步地,所述后吊点防松检测装置和前吊点防松检测装置各为两个。西安两层升降横移立体停车设备


- 新疆三层升降横移立体停车设备设计 2025-12-09
- 无锡停车设备哪家好 2025-12-09
- 无锡6层升降横移立体停车设备价格多少 2025-12-09
- 杭州自动升降横移停车设备价格多少 2025-12-08
- 杭州地坑升降停车设备生产厂家 2025-12-08
- 无锡多层升降停车设备 2025-12-08
- 新疆简易升降类停车设备维保 2025-12-05
- 杭州两层升降横移立体停车设备价格多少 2025-12-05


