自动点胶机在点胶加工过程中,总有可能出现一些问题,如果不能及时的解决这些问题,那么就有可能使得加工进度不能达到预期的目标,从而影响到出货,如何快速的解决点胶加工过程中出现的问题,这就是很关键的。1.拉丝所谓拉丝,也就是在点胶机点胶加工时贴片胶断不开,点胶机在点胶头移动方向贴片胶呈丝状连接这种现象。接丝较多,贴片胶覆盖在印制板焊盘上,会引发焊接不良。特别是使用尺寸较大时,点涂嘴时更易发生这种现象。贴片胶拉丝主要受其主成份树脂拉丝性的影响和对点涂条件的设定。解决方法:a.加大点胶机点胶头行程,降低机械手移动速度,这将会降低生产节拍。b.越是低粘度、高摇溶性的材料,拉丝的倾向越小,所以要尽量选择此类的贴片胶。c.将调温器的温度稍稍设高一些,强制性地调整成低粘度、高摇溶比的贴片胶。这时必须考虑贴片胶的贮存期和点胶头的压力。2.元器件的热破坏在波峰焊工艺中,为提高生产效率,连LED、铝电解电容等这样的耐热差的电子元器件也一起通过再流焊炉来固化。这时,如粘接剂的固化温度较高。上述元器件会因超过其耐热温度而遭到破坏。这时,我们的做法,要么是后装低耐热元器件,要么选择低温固化的贴片胶。 点胶加工可以应用于食品包装领域,如密封胶的涂覆。品质点胶加工货源充足
设备维护设备维护一直都是一个难点。它主要包括设备的拆卸、清洗、润滑,还有停机保养。和上述两点不同的是,自动化点胶的方式反而增加了设备维护的难度。2017年和2018年,分别有46%和45%的受访者对容积式点胶系统的维护视为头号难题。与此同时,对气动阀系统,2017年和2018年分别有39%和33%的受访者将其同样视为难题。另外,2018年有35%的受访者认为在气动喷射阀系统设备维护上困难很大。与气动阀和喷射阀系统相比,更多的受访者将容积式点胶系统视为问题一点也不奇怪。正排量点胶设备(例如容积泵)通常具有更复杂的零件,需要更多的时间来拆卸和清洁。正排量系统的优势在于,无论流体粘度或粘度随时间的变化如何,它们都可提供连续,可重复的点胶。相比于其它类型的点胶系统,其好处大于花费更长的时间进行清理的弊端。点胶技术的***进展,包括气动阀和压电喷射阀,通过创新的产品设计减少了维护时间。集成在阀门设计中的释放扣使操作员可以在将阀门安装到自动化系统的同时移除流体,不必拆卸阀门即可将其清洗再使用,从而节省了大量的维护时间。实际上,如果制造商提前准备了一种以上的流体,是可以做到无缝切换的,从而将停机时间降至**少。品质点胶加工货源充足点胶加工设备的精度通常可以达到微米级别,满足高精度产品的需求。
通过将点胶粘结的部件进行拉伸,测量其断裂时所需的力,可以定量地确定胶水的粘结效果是否达到设计要求。密封性测试对于需要防水、防尘或密封的产品至关重要。通过施加一定的压力或浸泡在特定的介质中,检测是否有液体或气体的泄漏,来评估点胶的密封性能。此外,还有一些其他的检测方法,如X射线检测、超声波检测等,可用于检测胶水在产品内部的分布情况和是否存在空洞等缺陷。综合运用这些检测方法,可以、准确地评估点胶加工的质量,确保产品符合相关的质量标准和性能要求。
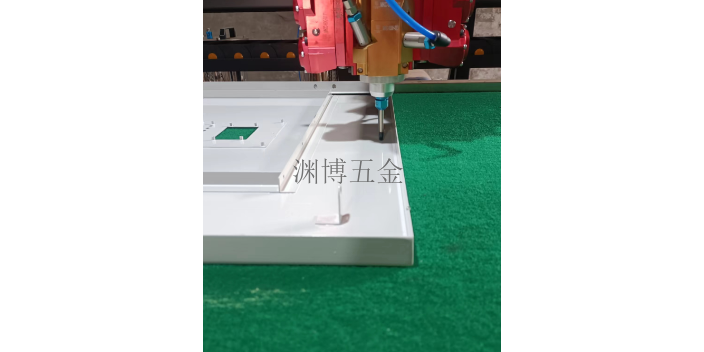
电子产品的壳体如今随着众多的电子产品有多种类型的样式,有些壳体在生产时用户可以考虑使用自动点胶机完成这种特殊涂胶要求喔,操作使用自动点胶设备进行电子壳体涂胶效果显得怎样呢?包括是否能够有效满足于生产的大致需要或者说在涂胶效果与效率方面机器表现效果如何呢?***小编将会带您深入认识一下该设备涂胶效果。能够满足电子产品壳体点胶加工的设备为自动点胶机,这是一款能够使用比较高的粘度的胶水来进行电子产品壳体点胶加工的设备,在搭配点胶阀方面也是能够特别符合高粘度涂胶要求而制定的,包括电子产品壳体点胶加工会使用到硅胶、热熔胶或者UV胶进行填充,因为硅胶、热熔胶或者UV胶这些胶水粘接效果好且整体密封性很好,当经电子产品壳体点胶加工涂覆后凝固之后还有一定的弹性优势存在,所以特别符合这里行业的电子产品壳体点胶加工要求,由于电子产品壳体点胶加工所用胶水粘度很高使用点胶阀需要特别注意,不然的话可能无法完成这部分电子产品壳体点胶加工要求。自动点胶机是一款标准型的桌面式三轴涂胶机,搭配胶水压力桶、点胶阀和控制器进行使用,在电子产品壳体点胶加工涂胶方面表现得非常好,包括每一条线都是呈笔直状态进行调整。 点胶加工在医疗设备制造中也有广泛应用,如注射器、导管等的组装。
[0033]具体地,所述把握单元32包括把握器及***开关。所述把握器用于把握所述移动机构10的第三驱动件13,使所述点胶针头200在第三方向进行移动。所述***开关根据与所述点胶针头200的接触,获得检测信息。所述检测信息为第三方向坐标,所述***开关为一微动开关。[0034]所述处理器用于把握所述点胶针头200接触所述微动开关,获得所述第三方向坐标;并依据所述第三方向坐标,检测所述点胶针头在第三方向的平均偏差,形成所述点胶针头200与基准坐标在第三方向的位置差。[0035]具体地,所述处理器通过以下方法得到所述位置差:[0036]首先,把握与所述***开关接触的所述点胶针头200,在第三方向上远离所述***开关任意距离;[0037]然后,把握所述点胶针头200再次接触所述***开关,以获得一所述第三方向坐标;说明书3/6页7CNB7[0038]随后,再次获得一所述第三方向坐标;[0039]***,判断两个所述第三方向坐标之间的差值是否位于允许公差内:[0040]是,则获得两个所述第三方向坐标形成的所述第三方向坐标**的均值,得到所述位置差;[0041]否,则判定获取的所述第三方向坐标偏差过大,再次获得所述第三方向坐标,并进行再次判断。[0042]若多次判定均不在公差内,则把握一警示单元。 南京全自动点胶加工厂家,源头厂家,价格更优惠!品质点胶加工定制厂家
点胶加工设备的软件系统支持多种编程语言,便于用户自定义操作流程。品质点胶加工货源充足
[0081]第二方向校正:[0082]步骤S12,将点胶针头200移动至载玻片34上方,并移动点胶针头200的针尖至第二方向坐标Y1处。[0083]具体地,通过移动机构10的***驱动件11、第二驱动件12及第三驱动件13控制点胶针头200在***方向、第二方向及第三方向移动,使点胶针头200的针尖移动至第二方向坐标Y1处,Y1=Y0+2mm,并使点胶针头200的针尖距载玻片34表面的距离为点胶间隙。[0084]步骤S13,沿***方向在载玻片34上点一段第三胶路。[0085]具体地,通过***驱动件11控制点胶针头200在***方向移动,并通过点胶阀22控制点胶针头200进行点胶,在***方向上得到一段长为10mm的第三胶路。[0086]步骤S14,测得第三胶路的胶路中心点及胶宽。[0087]具体地,探测器351对第三胶路及基准线集进行拍摄,获得探测信息。去除第三胶路前后受点胶开关影响的一段距离,如2mm,处理器在剩余胶路的***方向上均匀取点,测得其各自的胶宽YH1及胶路中点YM1。胶宽YH1为所取点位上胶路两侧的边界在第二方向的坐标之差,胶路中点YM1为所取点位上胶路两侧的边界在第二方向的坐标的平均值。然后,计算出胶宽YH1及胶路中点YM1的平均值,即为第三胶路的胶宽YH及胶路中心点YM。[0088]步骤S15,对第二方向进行校正。 品质点胶加工货源充足