机器人焊钳在焊接过程中,需要保障焊接质量,主要有以下几个方面:1.焊接参数的控制:机器人焊钳需要根据焊接材料、厚度、焊接位置等因素,合理设置焊接参数,如电流、电压、焊接速度等,以保证焊接质量。2.焊接路径的规划:机器人焊钳需要根据焊接工件的形状、大小等特点,合理规划焊接路径,以保证焊接质量。3.焊接过程的监控:机器人焊钳需要通过传感器等设备,对焊接过程进行实时监控,如焊接温度、焊缝形态等,以及时发现并解决问题,保证焊接质量。4.焊接后的检测:机器人焊钳需要对焊接后的工件进行检测,如X射线检测、超声波检测等,以保证焊接质量。5.保养维护:机器人焊钳需要定期进行保养维护,如更换焊接头、清洗焊接设备等,以保证设备的正常运行,从而保证焊接质量。机器人焊钳的使用可以提高工作安全性,减少人员受伤的风险。上海机器人焊钳报价

机器人焊钳在使用过程中需要注意以下安全问题:1.机器人操作区域应该有明确的标识,禁止未经授权的人员进入。2.操作人员应该接受专业的培训,了解机器人的操作方法和安全规范。3.机器人应该安装在稳定的基础上,避免机器人在操作过程中发生倾斜或移动。4.机器人应该配备安全装置,如安全光幕、安全门等,以保证操作人员的安全。5.在操作机器人时,应该戴上防护手套、护目镜等个人防护装备,以避免受到火花、烟尘等伤害。6.机器人的电源应该随时关闭,以避免电击等安全事故。7.在机器人操作过程中,应该随时检查机器人的状态,如电源、传感器等,确保机器人正常运行。8.在机器人操作过程中,应该避免与机器人的工作区域接触,以避免受到机器人的碰撞或夹伤。9.在机器人操作过程中,应该避免机器人与其他设备或人员发生碰撞,以避免安全事故的发生。10.在机器人操作过程中,应该随时注意机器人的工作状态,如温度、电流等,以避免机器人发生故障或损坏。上海机器人焊钳报价机器人焊钳的使用可以减少焊接误差和缺陷,提高产品质量。

机器人焊钳的控制系统是由多个部分组成的,包括硬件和软件。硬件部分包括机器人本身、焊钳、传感器、控制器和电源等。软件部分则包括控制程序、运动规划、路径规划、力控制和通信等。机器人焊钳的控制系统的运作过程如下:1.运动规划:根据焊接任务的要求,通过运动规划算法计算机器人的运动轨迹和速度。2.路径规划:根据运动规划的结果,计算机器人的路径,确保机器人能够按照预定的轨迹移动。3.力控制:机器人焊钳需要对焊接件施加一定的力,以确保焊接质量。通过力传感器和控制器,控制机器人焊钳施加的力大小和方向。4.通信:机器人焊钳的控制系统需要与其他设备进行通信,如与焊接机器、传感器和计算机等进行数据交换和控制指令传输。5.控制程序:机器人焊钳的控制程序是整个控制系统的重心,它控制机器人的运动、力控制和通信等功能,确保机器人能够按照预定的轨迹和力度进行焊接。总之,机器人焊钳的控制系统是一个复杂的系统,需要多个部分协同工作,才能实现高效、精确的焊接任务。
机器人焊钳的维护保养是保证其正常运行和延长使用寿命的重要措施。其主要内容包括以下几个方面:1.清洁保养:定期清洁焊钳表面和内部零部件,避免灰尘和杂物进入,影响机器人的正常运行。2.润滑维护:定期对焊钳的轴承、齿轮等零部件进行润滑,保证其灵活运转,减少磨损。3.检查维修:定期检查焊钳的各个部位是否有松动、磨损、裂纹等情况,及时进行维修和更换。4.电气维护:定期检查焊钳的电气系统,包括电缆、接线、开关等,确保其正常运行。5.程序更新:定期更新机器人焊接程序,保证其与焊钳的配合更加精确,提高焊接质量和效率。维护保养机器人焊钳需要专业技术和经验,建议由专业人员进行操作和维护,以确保机器人的正常运行和安全使用。机器人焊钳的使用能够提高企业的竞争力和市场占有率。
机器人焊钳的操作难度可以从以下几个方面进行评估:1.技术难度:机器人焊钳需要掌握多种技术,如机器人编程、焊接技术、传感器技术等,这些技术的掌握难度较高,需要专业的技术人员进行操作。2.系统难度:机器人焊钳需要整合多个系统,如机器人系统、焊接系统、控制系统等,这些系统的整合难度较高,需要专业的系统集成人员进行操作。3.环境难度:机器人焊钳需要在特定的环境下进行操作,如高温、高压、有害气体等环境,这些环境的操作难度较高,需要专业的操作人员进行操作。4.安全难度:机器人焊钳需要遵守严格的安全规定,如防止机器人碰撞、防止电击等,这些安全规定的遵守难度较高,需要专业的安全人员进行操作。综上所述,机器人焊钳的操作难度较高,需要专业的技术人员、系统集成人员、操作人员和安全人员进行操作,同时需要严格遵守相关的技术、系统、环境和安全规定。机器人焊钳的使用能够减少工人的劳动强度,提高工作安全性。上海智能机器人焊钳设备
机器人焊钳的控制系统稳定可靠,能够保证设备的长期稳定运行。上海机器人焊钳报价
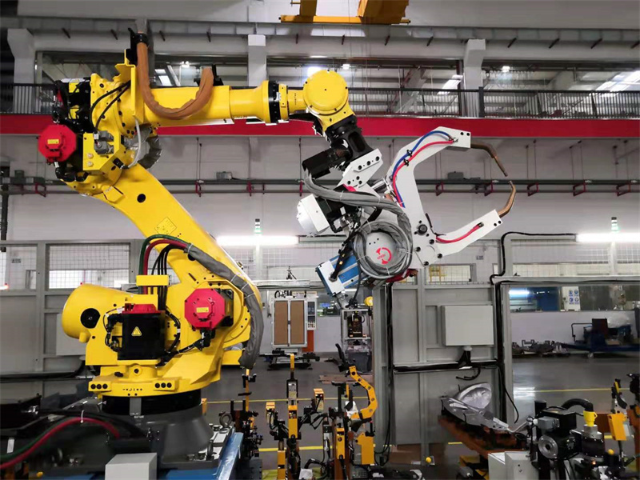
机器人焊钳是一种自动化焊接设备,由机器人手臂和焊钳组成。焊钳是机器人焊接的关键部件,它的结构设计直接影响到焊接质量和效率。机器人焊钳的结构通常包括以下几个部分:1.夹持器:夹持器是焊钳的主要部件,用于夹持焊接工件。夹持器通常由两个夹爪组成,夹爪之间的距离可以根据焊接工件的大小进行调整。2.电极:电极是焊接时传递电流的部件,通常由铜制成。电极的形状和大小可以根据焊接工件的形状和大小进行设计。3.冷却系统:焊接时会产生大量的热量,需要通过冷却系统来降温。冷却系统通常由水冷或气冷组成。4.传感器:传感器用于检测焊接工件的位置和形状,以便机器人可以准确地夹持焊接工件和进行焊接。5.控制系统:控制系统用于控制机器人焊钳的运动和焊接参数,包括焊接电流、焊接速度、焊接时间等。总之,机器人焊钳的结构设计需要考虑到焊接工件的形状和大小,以及焊接质量和效率的要求。通过合理的结构设计和控制系统,机器人焊钳可以实现高效、精确、稳定的自动化焊接。上海机器人焊钳报价
#机器人焊钳工作原理对焊接质量的影响 机器人焊钳作为自动化焊接领域的**设备,其工作原理深...
【详情】机器人焊钳是一种用于焊接机器人系统的工具,它可以提高焊接质量和生产效率,降低劳动强度和成本。不同类型...
【详情】电流的精确控制同样是影响焊接质量的关键因素。机器人焊钳采用先进的焊接电源和智能控制系统,能够根据不同...
【详情】在操作机器人焊钳时,需要注意以下几点:1.编程:根据焊接工艺和工件形状,编写合适的焊接程序,并将程序...
【详情】机器人焊钳是一种用于机器人焊接系统的工具,它可以精确地控制焊接位置和焊接参数,提高焊接质量和效率。以...
【详情】机器人焊钳的价格因多种因素而异,主要包括以下几个方面:1.品牌和质量:**品牌和高质量的机器人焊钳通...
【详情】机器人焊钳是一种高精度、高效率的焊接设备,广泛应用于汽车、航空航天、电子等领域。它具有以下特点:1....
【详情】机器人焊钳是一种高效、灵活、精细的焊接设备,广泛应用于汽车制造、航空航天、电子、机械等领域。随着科技...
【详情】在机器人焊钳的工作原理中,电极扮演着至关重要且有着独特作用机制的角色。电极是机器人焊钳实现焊接功能的...
【详情】机器人焊钳是一种高效、灵活的焊接设备,广泛应用于汽车制造、航空航天、电子等领域。它具有以下特点:1....
【详情】为了确保机器人焊钳的质量和性能,我们公司采取了严格的质量控制和检测方法,包括:1.原材料检验:对机器...
【详情】