机器人焊钳在焊接过程中可以通过调整焊接参数来应对不同的材料和厚度。首先,机器人焊钳需要根据焊接材料的种类和厚度选择合适的焊接电流、电压、焊接速度等参数。对于较薄的材料,机器人焊钳可以采用较小的电流和速度,以避免过度加热和变形。对于较厚的材料,机器人焊钳需要采用较大的电流和速度,以确保焊接质量和焊缝的牢固性。此外,机器人焊钳还可以通过使用不同的焊接头和焊接材料来适应不同的材料和厚度。例如,对于不同种类的钢材,机器人焊钳可以选择不同种类的焊接头和焊接材料,以确保焊接质量和焊缝的牢固性。同时,机器人焊钳还可以根据焊接材料的特性和要求,选择不同的焊接方式,如MIG焊、TIG焊等,以满足不同的需求。机器人焊钳的使用能够提高生产线的灵活性和响应速度,适应市场需求的变化。杭州全自动机器人焊钳哪家好

机器人焊钳的抗干扰能力是非常重要的,因为焊接过程中会受到很多干扰,如电磁干扰、机械振动、温度变化等。如果机器人焊钳的抗干扰能力不强,就会导致焊接质量不稳定,甚至出现焊接失败的情况。为了提高机器人焊钳的抗干扰能力,需要从以下几个方面进行优化:1.电磁屏蔽:在机器人焊钳的设计中,需要考虑电磁屏蔽的问题,采用合适的电磁屏蔽材料和结构,减少电磁干扰对机器人的影响。2.控制系统优化:机器人焊钳的控制系统需要进行优化,采用高精度的控制算法和传感器,提高控制精度和稳定性,减少机械振动对焊接质量的影响。3.温度控制:焊接过程中温度的变化会对焊接质量产生影响,因此需要采用合适的温度控制技术,保持焊接区域的稳定温度,提高焊接质量。4.故障检测:机器人焊钳需要具备故障检测和自动修复的功能,及时发现和处理故障,保证焊接过程的稳定性和可靠性。综上所述,机器人焊钳的抗干扰能力是非常重要的,需要从多个方面进行优化,提高机器人焊钳的稳定性和可靠性,保证焊接质量的稳定和一致性。河南C型机器人焊钳多少钱一台机器人焊钳的操作过程中能够实现自动化的物料输送和处理,提高生产线的自动化程度。

机器人焊钳的焊接参数设置需要根据具体的焊接工艺和焊接材料来确定。一般来说,焊接参数包括焊接电流、电压、焊接速度、焊接时间、焊接角度等。首先,焊接电流和电压是影响焊接质量的关键参数,需要根据焊接材料的种类、厚度、焊接位置等因素来确定。一般来说,焊接电流和电压需要根据焊接材料的熔点、热导率、热膨胀系数等因素来进行调整。其次,焊接速度和焊接时间也是影响焊接质量的重要参数。焊接速度需要根据焊接材料的熔点、热导率、热膨胀系数等因素来进行调整,而焊接时间则需要根据焊接材料的厚度、焊接位置等因素来进行调整。除此之外,焊接角度也是影响焊接质量的重要因素。焊接角度需要根据焊接材料的形状、焊接位置等因素来进行调整,以确保焊接质量和焊接强度。总之,机器人焊钳的焊接参数设置需要根据具体的焊接工艺和焊接材料来确定,需要进行多次试验和调整,以确保焊接质量和焊接强度。
机器人焊钳的能源消耗可以通过以下几种方式进行控制:1.优化程序:通过优化焊接程序,减少焊接时间和次数,从而降低机器人的能源消耗。2.选择高效设备:选择高效的焊接设备和机器人,可以降低能源消耗。3.节能措施:采用节能措施,如使用节能灯具、调整空调温度等,可以降低机器人的能源消耗。4.定期维护:定期对机器人进行维护和保养,保持机器人的正常运行状态,可以减少机器人的能源消耗。5.使用智能控制系统:使用智能控制系统,可以实现对机器人的精确控制,从而降低机器人的能源消耗。综上所述,机器人焊钳的能源消耗可以通过多种方式进行控制,从而实现节能减排的目的。机器人焊钳的操作过程中不会产生有害气体和噪音,对环境和人体健康无害。
机器人焊钳是一种自动化焊接设备,与其他焊接设备相比,它具有以下区别和优势:1.自动化程度高:机器人焊钳可以实现全自动化焊接,无需人工干预,很大程度提高了生产效率和焊接质量。2.精度高:机器人焊钳采用数字化控制系统,能够精确控制焊接位置和焊接速度,保证焊接质量。3.灵活性强:机器人焊钳可以根据不同的焊接任务进行编程,适应不同的焊接需求,具有较强的灵活性。4.安全性高:机器人焊钳可以在危险环境下进行焊接,避免了人工焊接的安全隐患。5.成本低:机器人焊钳可以实现长时间连续焊接,减少了人工成本和生产成本,降低了企业的生产成本。综上所述,机器人焊钳具有自动化程度高、精度高、灵活性强、安全性高和成本低等优势,是现代焊接生产中不可或缺的设备。机器人焊钳采用先进的自动化技术,能够实现高质量的焊接效果。深圳机器人焊钳多少钱一台
机器人焊钳的使用可以提高生产线的稳定性和可靠性,减少生产线停机的风险。杭州全自动机器人焊钳哪家好
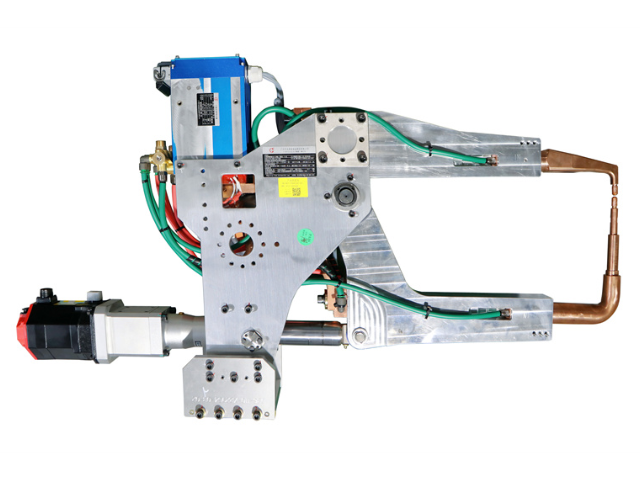
机器人焊钳的工作原理是通过控制系统控制机器人的运动,使其按照预定的路径和速度进行运动,同时通过传感器感知焊接过程中的温度、电流、电压等参数,实现焊接的自动化。具体来说,机器人焊钳的工作原理包括以下几个方面:1.控制系统:机器人焊钳的控制系统包括硬件和软件两部分,硬件包括电机、传感器、控制器等,软件包括程序和算法。控制系统可以实现机器人的运动控制、焊接参数的控制和监测等功能。2.机械结构:机器人焊钳的机械结构包括机械臂、焊钳、传动系统等,机械臂可以实现多自由度的运动,焊钳可以实现焊接操作,传动系统可以将电机的转动转化为机械臂的运动。3.传感器:机器人焊钳的传感器可以感知焊接过程中的温度、电流、电压等参数,通过传感器的反馈,控制系统可以实时调整焊接参数,保证焊接质量。4.焊接参数:机器人焊钳的焊接参数包括焊接电流、电压、速度、焊接时间等,这些参数可以根据焊接材料和焊接要求进行调整,以保证焊接质量。综上所述,机器人焊钳的工作原理是通过控制系统控制机器人的运动和焊接参数,实现焊接的自动化。机器人焊钳具有高效、精确、稳定的特点,可以提高焊接效率和质量。杭州全自动机器人焊钳哪家好
电极的材质和形状对其作用机制有着重要影响。通常,电极会采用具有良好导电性和耐高温性能的材料,如铜合金...
【详情】机器人焊钳是我们公司的**产品,具有以下特点:1.高精度:能够实现精确的焊接,确保焊接质量。2.高效...
【详情】从工作原理看,机器人焊钳实现高效焊接有着独特的机制。机器人焊钳主要由机械结构、电气控制和焊接组件构成...
【详情】机器人焊钳是一种高效、精细的焊接工具,广泛应用于汽车制造、机械加工等行业。为了保障机器人焊钳的安全性...
【详情】机器人焊钳是一种先进的焊接设备,具有以下特点:1.高效焊接:机器人焊钳能够精确地控制焊接过程,提高焊...
【详情】机器人焊钳是一种高效、灵活、精细的焊接设备,广泛应用于汽车制造、航空航天、电子、机械等领域。随着科技...
【详情】在现代焊接领域,机器人焊钳与传统焊钳各自有着独特的工作原理,这些差异决定了它们在不同场景下的应用...
【详情】这一热量会使接触点的金属迅速熔化,从而实现焊接的目的。整个电力传输过程紧密配合,从**初的电力输...
【详情】亨龙助手:非常感谢你对我们公司机器人焊钳的关注。机器人焊钳是我们公司的**产品之一,具有高效、精细、...
【详情】在对流散热方面,机器人焊钳的结构设计充分考虑了空气的流动。外壳上设计有合理的通风口,当焊钳工作时...
【详情】机器人焊钳是一种高精度、高效率的焊接设备,广泛应用于汽车制造、航空航天、电子等领域。为了确保机器人焊...
【详情】机器人焊钳是一种高精度、高效率的焊接设备,广泛应用于汽车、航空航天、电子等领域。它具有以下特点:1....
【详情】