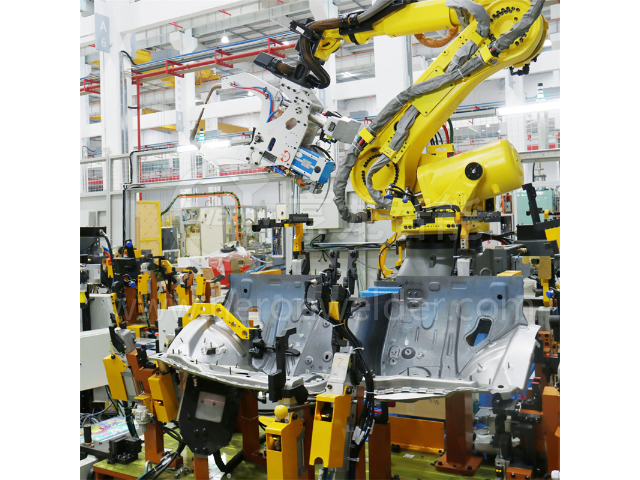
机器人焊钳的基本原理是通过机器人控制系统控制焊钳的运动,实现对工件进行焊接。机器人焊钳主要由机器人控制系统、焊钳、焊接电源、传感器等组成。机器人控制系统是机器人焊钳的主要部分,它通过控制机器人的运动轨迹和焊钳的动作,实现对工件的精确焊接。焊钳是机器人焊接的工具,它可以根据需要进行开合、旋转等动作,以适应不同的焊接需求。焊接电源是机器人焊接的能源,它提供焊接所需的电能和热能。传感器可以检测焊接过程中的温度、电流、电压等参数,以保证焊接质量。机器人焊钳的工作流程一般包括以下几个步骤:首先,机器人控制系统会根据焊接任务的要求,确定焊接路径和焊接参数。然后,焊钳会根据路径和参数进行动作,将焊接电源提供的电能和热能传递到工件上,完成焊接过程。除此之外,传感器会对焊接质量进行检测和监控,以确保焊接质量符合要求。机器人焊钳的优点是可以实现高精度、高效率的焊接,可以适应不同的焊接需求,同时还可以减少人工操作的风险和劳动强度。因此,在现代制造业中,机器人焊钳已经成为一种重要的焊接工具。机器人焊钳的使用可以大幅降低人力成本,提高生产效率,降低生产成本。重庆机械臂机器人焊钳供应商

机器人焊钳在焊接过程中,材料变形是一个常见的问题。这是因为焊接时会产生高温,导致材料膨胀和收缩,从而导致变形。为了防止材料变形,可以采取以下措施:1.控制焊接温度:通过控制焊接温度,可以减少材料的膨胀和收缩。可以使用低温焊接或者采用预热的方法来控制焊接温度。2.采用适当的焊接技术:不同的焊接技术对材料的变形影响不同。选择适当的焊接技术可以减少材料的变形。例如,采用点焊或者激光焊接可以减少材料的变形。3.采用适当的焊接参数:焊接参数的选择对材料的变形也有很大的影响。选择适当的焊接参数可以减少材料的变形。例如,选择适当的焊接速度和焊接电流可以减少材料的变形。4.采用适当的夹具:夹具的选择对材料的变形也有很大的影响。选择适当的夹具可以减少材料的变形。例如,采用弹性夹具可以减少材料的变形。总之,机器人焊钳在焊接过程中,通过控制焊接温度、选择适当的焊接技术和参数、以及选择适当的夹具,可以有效地防止材料的变形。机械臂机器人焊钳公司机器人焊钳的操作过程中,能够实现自动化控制,减少人为干扰和误操作。
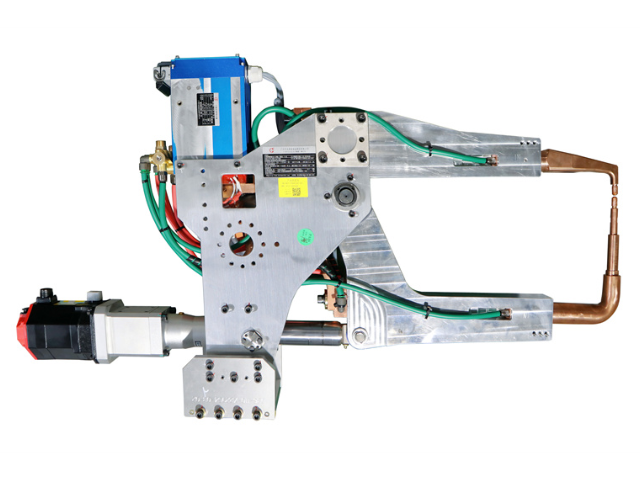
机器人焊钳的工作原理是通过控制系统控制机器人的运动,使其按照预定的路径和速度进行运动,同时通过传感器感知焊接过程中的温度、电流、电压等参数,实现焊接的自动化。具体来说,机器人焊钳的工作原理包括以下几个方面:1.控制系统:机器人焊钳的控制系统包括硬件和软件两部分,硬件包括电机、传感器、控制器等,软件包括程序和算法。控制系统可以实现机器人的运动控制、焊接参数的控制和监测等功能。2.机械结构:机器人焊钳的机械结构包括机械臂、焊钳、传动系统等,机械臂可以实现多自由度的运动,焊钳可以实现焊接操作,传动系统可以将电机的转动转化为机械臂的运动。3.传感器:机器人焊钳的传感器可以感知焊接过程中的温度、电流、电压等参数,通过传感器的反馈,控制系统可以实时调整焊接参数,保证焊接质量。4.焊接参数:机器人焊钳的焊接参数包括焊接电流、电压、速度、焊接时间等,这些参数可以根据焊接材料和焊接要求进行调整,以保证焊接质量。综上所述,机器人焊钳的工作原理是通过控制系统控制机器人的运动和焊接参数,实现焊接的自动化。机器人焊钳具有高效、精确、稳定的特点,可以提高焊接效率和质量。
机器人焊钳相比人工焊接具有以下优势:1.精度高:机器人焊钳具有高精度的定位和控制能力,能够保证焊接质量的稳定性和一致性。2.生产效率高:机器人焊钳可以实现连续、高速、长时间的工作,很大程度的提高了生产效率和产量。3.节省人力成本:机器人焊钳可以代替人工完成繁琐、危险、重复性高的工作,节省了人力成本和劳动力。4.适应性强:机器人焊钳可以根据不同的焊接需求进行编程和调整,适应性强,可以适用于不同的焊接工艺和材料。5.安全性高:机器人焊钳可以在高温、高压、有毒、有害等危险环境下工作,保证了操作人员的安全。6.数据记录方便:机器人焊钳可以记录每一次焊接的数据,方便后期的质量检测和追溯。机器人焊钳能够实现多种焊接方式,包括点焊、拖焊、搭接焊等。
机器人焊钳是工业生产中常用的自动化设备,但在使用过程中也会出现故障。常见的机器人焊钳故障包括:焊接不牢、焊接位置偏移、焊接质量不佳等。以下是机器人焊钳的故障排除方法:1.检查焊接参数:焊接参数设置不当是导致焊接质量不佳的主要原因之一。检查焊接参数是否符合要求,如电流、电压、焊接速度等。2.检查焊接材料:焊接材料的质量也会影响焊接质量。检查焊接材料是否符合要求,如焊丝直径、焊丝种类等。3.检查焊接设备:焊接设备的故障也会导致焊接质量不佳。检查焊接设备是否正常工作,如焊接头、电源等。4.检查机器人程序:机器人程序的编写不当也会导致焊接质量不佳。检查机器人程序是否符合要求,如焊接路径、焊接速度等。5.检查机器人机械结构:机器人机械结构的故障也会导致焊接位置偏移等问题。检查机器人机械结构是否正常,如机械臂、焊接头等。总之,机器人焊钳的故障排除需要综合考虑多个因素,从焊接参数、焊接材料、焊接设备、机器人程序、机器人机械结构等多个方面进行检查,找出故障原因并及时解决。机器人焊钳的操作简单易学,能够提高工作效率和生产效益。机械臂机器人焊钳公司
机器人焊钳采用先进的传感技术和控制系统,能够实现高精度的焊接操作。重庆机械臂机器人焊钳供应商
机器人焊钳在焊接过程中保持稳定需要考虑以下几个方面:1.机器人的运动控制:机器人需要具备精确的运动控制能力,以确保焊钳在焊接过程中的稳定性。机器人的运动控制系统需要具备高精度的位置控制和速度控制能力,以确保焊钳在焊接过程中的稳定性。2.焊钳的结构设计:焊钳的结构设计需要考虑到焊接工件的形状和大小,以确保焊钳能够牢固地夹住工件,并且在焊接过程中不会发生松动或者抖动。焊钳的结构设计还需要考虑到焊接过程中的热变形和热膨胀,以确保焊钳在焊接过程中的稳定性。3.焊接参数的控制:焊接参数的控制对于焊接过程的稳定性也非常重要。焊接参数包括焊接电流、焊接电压、焊接速度等,这些参数需要根据焊接工件的材料和形状进行调整,以确保焊接过程的稳定性。4.环境因素的控制:焊接过程中的环境因素也会对焊接过程的稳定性产生影响。例如,焊接过程中的风力、震动、温度等因素都需要进行控制,以确保焊接过程的稳定性。重庆机械臂机器人焊钳供应商
###机器人焊钳压力控制的稳定性保障 机器人焊钳的压力控制不*要实现精细调节,更要保障其稳...
【详情】机器人焊钳是一种高效、灵活的焊接工具,广泛应用于汽车制造、航空航天、电子等领域。它具有以下特点:1....
【详情】机器人焊钳是我们公司的**产品,具有以下特点:1.高精度:能够实现精确的焊接,确保焊接质量。2.高效...
【详情】###机器人焊钳压力控制的自适应能力 机器人焊钳的压力控制具备出色的自适应能力,这使得它能...
【详情】###机器人焊钳压力控制的自适应能力 机器人焊钳的压力控制具备出色的自适应能力,这使得它能...
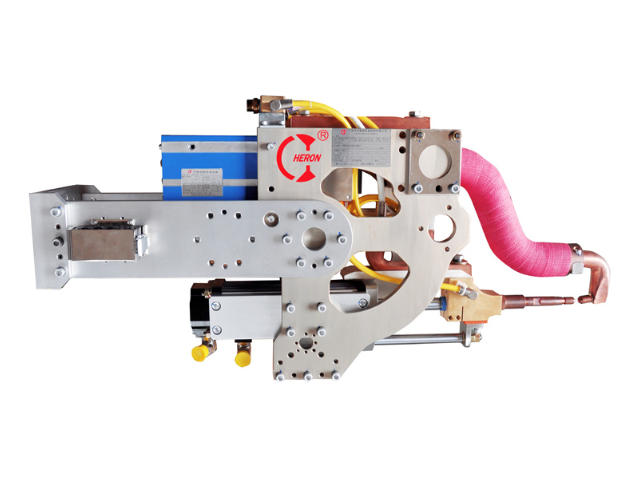
【详情】调整后的电力会被输送到电极臂。电极臂是机器人焊钳的关键部件之一,它不*要承载电力,还要将电力有效...
【详情】在操作机器人焊钳时,需要注意以下几点:1.编程:根据焊接工艺和工件形状,编写合适的焊接程序,并将程序...
【详情】而机器人焊钳则是高度自动化的焊接设备。其工作原理是通过预先编程的程序,控制机器人的运动轨迹和焊钳的动...
【详情】机器人焊钳相比传统焊接工艺,具有高效、精细、稳定等优点。它可以实现高精度的焊接,提高焊接质量和效率,...
【详情】然而,性价比是选择机器人焊钳时需要综合考虑的重要因素。虽然价格是一个重要的考虑因素,但不能**根据价...
【详情】在使用机器人焊钳时,请注意以下安全事项:1.操作人员必须经过专业培训,熟悉机器人焊钳的操作流程和安全...
【详情】