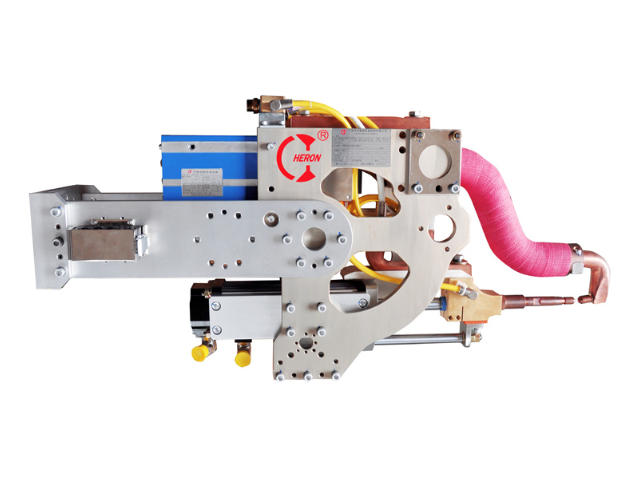
机器人焊钳是一种高精度、高效率的焊接设备,广泛应用于汽车、航空航天、电子等领域。它具有以下特点:1.高精度:机器人焊钳采用先进的传感器和控制系统,能够实现高精度的焊接,焊接质量稳定可靠。2.高效率:机器人焊钳可以实现自动化焊接,**提高焊接效率,减少人工操作时间。3.灵活性:机器人焊钳可以根据不同的焊接需求进行编程和调整,具有很强的灵活性。4.可靠性:机器人焊钳采用高质量的材料和先进的制造工艺,具有很高的可靠性和稳定性。随着机器人技术的不断发展,机器人焊钳的应用范围将越来越***。同时,机器人焊钳的市场需求也在不断增加,对机器人焊钳的培训和人才需求也越来越大。为了满足市场需求,我们公司将不断加强机器人焊钳的研发和生产,提高产品质量和性能,为客户提供更好的产品和服务。工作原理是利用电容储能释放大电流,电极瞬间完成对焊件的焊接,高效又节能。深圳双机器人机器人焊钳电路图
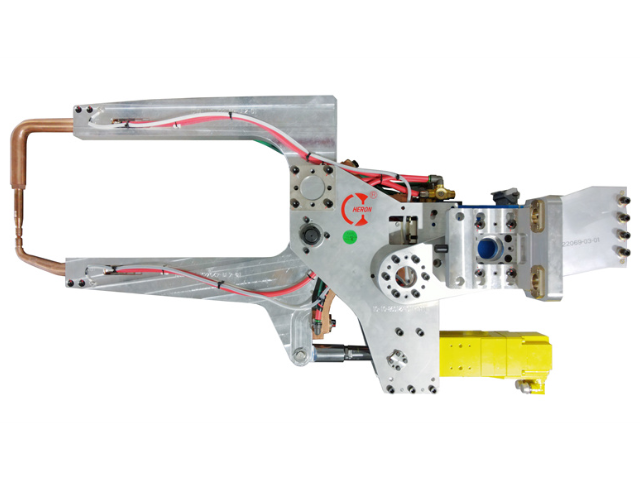
而机器人焊钳则是高度自动化的焊接设备。其工作原理是通过预先编程的程序,控制机器人的运动轨迹和焊钳的动作。机器人根据设定好的参数,精确地将焊钳移动到焊接位置,自动完成电极的开合、压力施加和电流导通等操作。机器人焊钳采用先进的传感器和控制系统,能够实时监测焊接过程中的各项参数,如电流、电压、压力等,并根据反馈信息进行自动调整,确保焊接质量的稳定性和一致性。此外,机器人焊钳的焊接速度快,能够在短时间内完成大量焊接任务,**提高了生产效率。同时,机器人可以在恶劣的工作环境下持续工作,减少了人工劳动强度和安全风险。陕西X型机器人焊钳批发机器人焊钳以先进的微电脑控制,根据焊件特性调整电流和压力,实现准确焊接。
机器人焊钳是一种先进的焊接工具,具有高效、精细、稳定等特点。它采用先进的焊接技术,能够实现高质量的焊接效果,焊缝均匀、美观,强度高,可靠性好。机器人焊钳的焊接效果非常出色,它能够精确控制焊接参数,如焊接电流、电压、焊接速度等,从而保证焊接质量的稳定性和一致性。同时,机器人焊钳还具有自适应焊接功能,能够根据不同的焊接材料和焊接位置自动调整焊接参数,提高焊接效率和质量。此外,机器人焊钳还具有良好的操作性和维护性,它采用人性化的设计,操作简单方便,易于维护和保养。同时,机器人焊钳还具有高度的灵活性和可扩展性,能够满足不同用户的需求。总之,机器人焊钳是一种非常***的焊接工具,它的焊接效果出色,操作简单方便,维护保养容易,具有高度的灵活性和可扩展性,是您焊接工作的理想选择。
例如,当焊接电流出现微小波动时,控制系统会立即调整电源输出,保证电流稳定在设定值范围内,从而确保焊接过程的一致性和精度。而且,控制系统还能根据不同的焊接任务和材料特性,自动调整参数,进一步提高焊接精度。
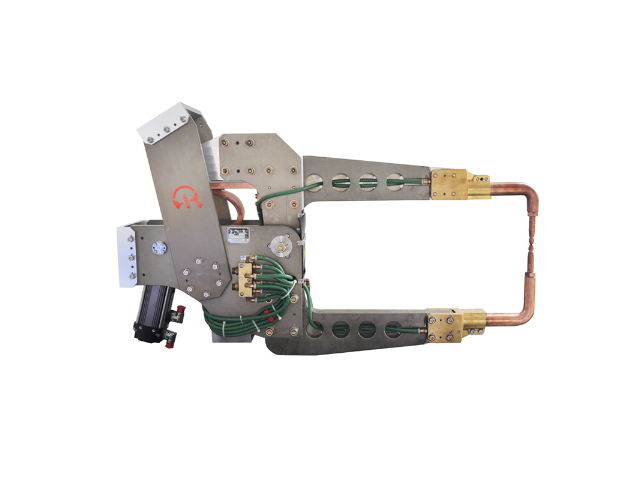
再者,机器人焊钳的传感器技术也为焊接精度提供了有力保障。安装在电极上的压力传感器能够实时感知电极施加的压力大小,并将数据反馈给控制系统。当压力不符合设定要求时,控制系统会及时调整,保证压力均匀且稳定。同时,温度传感器可以监测焊接区域的温度,避免因温度过高或过低影响焊接质量。通过这些传感器的协同工作,机器人焊钳能够在各种复杂的工况下,始终保持高精度的焊接作业,为工业生产提供高质量的焊接解决方案。 机器人焊钳依靠机械传动结构带动电极,在精确的电流作用下,实现焊件的紧密连接。
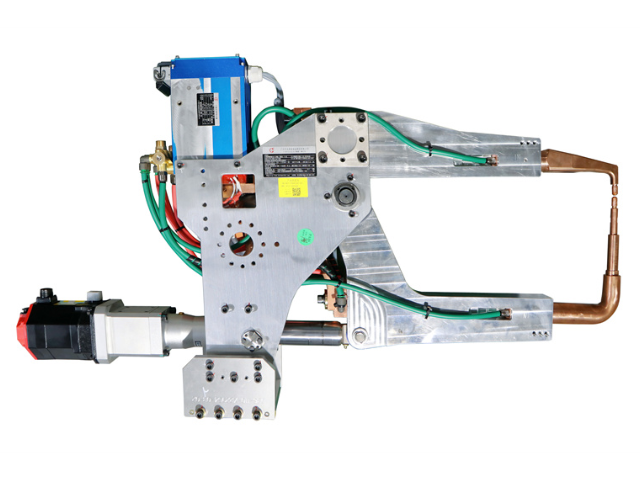
机器人焊钳是一种高效、灵活的焊接设备,广泛应用于汽车制造、航空航天、电子等领域。它具有以下特点:1.高精度:采用先进的传感器和控制系统,能够实现高精度的焊接,确保焊接质量。2.高速度:机器人焊钳的动作速度快,可以**提高生产效率。3.高可靠性:采用高质量的材料和先进的制造工艺,具有很高的可靠性和稳定性。4.多功能:可以根据不同的焊接需求进行定制化设计,满足不同的焊接工艺要求。5.易于操作:具有简单易用的操作界面,操作人员可以轻松掌握。我们的机器人焊钳可以根据客户的定制化需求提供解决方案,为客户提供比较好的焊接效果。我们的产品广泛应用于汽车制造、航空航天、电子等领域,深受客户好评。欢迎来电咨询,我们将竭诚为您服务!机器人焊钳通过伺服电机准确控制电极运动,依据预设参数施加压力和电流,高效完成焊接。北京双机器人机器人焊钳厂家
航空航天领域,机器人焊钳凭借高精度、高稳定性特点,完成飞行器零部件的焊接,为航空事业打造坚实基础。深圳双机器人机器人焊钳电路图
在现代焊接领域,机器人焊钳与传统焊钳各自有着独特的工作原理,这些差异决定了它们在不同场景下的应用表现。
传统焊钳通常依靠人工操作,其工作原理基于操作人员直接控制焊钳的开合与焊接动作。在焊接过程中,操作人员手持焊钳,将电极对准焊接部位,通过施加压力使电极与工件紧密接触,然后接通电流,利用电流产生的电阻热使焊接部位的金属熔化,从而实现焊接连接。这种方式对操作人员的技能水平要求较高,焊接质量在很大程度上取决于工人的经验和操作熟练度。而且,人工操作的速度相对较慢,难以保证焊接质量的一致性,在大规模生产中效率较低。 深圳双机器人机器人焊钳电路图
1、机器人焊钳是一种高效、精细的焊接工具,它采用先进的自动化技术,能够实现高质量的焊接作业。机器人焊...
【详情】而机器人焊钳则是高度自动化的焊接设备。其工作原理是通过预先编程的程序,控制机器人的运动轨迹和焊钳的动...
【详情】###机器人焊钳压力控制的稳定性保障 机器人焊钳的压力控制不*要实现精细调节,更要保障其稳...
【详情】机器人焊钳是一种先进的焊接工具,它具有高效、精细、稳定等特点,能够**提高焊接质量和效率。随着科技的...
【详情】从工作原理的角度来剖析,机器人焊钳实现高效焊接的过程十分精妙。机器人焊钳的工作基于先进的自动化控制技...
【详情】机器人焊钳是一种高效、精细、可靠的焊接工具,具有广泛的应用前景。随着制造业的不断发展,对焊接质量和效...
【详情】机器人焊钳在汽车制造行业中具有广泛的应用。它能够实现高精度、高效率的焊接作业,**提高了汽车生产的质...
【详情】机器人焊钳是一种高效、节能、环保的焊接工具,它采用先进的技术和设计,能够实现高质量的焊接效果。以下是...
【详情】为了确保机器人焊钳的质量和性能,我们公司采取了严格的质量控制和检测方法,包括:1.原材料检验:对机器...
【详情】在机器人焊钳的工作体系中,电力传输是一个至关重要且复杂精妙的过程。首先,电力从供电系统出发,经过...
【详情】