-
内蒙古数据分析工业安全监测系统
在现代工业环境中,斗轮机作为关键的物料搬运设备,其安全运行对整个生产线的效率和安全性至关重要。斗轮机工业安全监测系统通过实时监测设备的运行状态和周边环境,能够有效预防潜在的安全隐患。系统通过传感器网络,监测斗轮机的振动、温度、负荷等参数,当检测到异常时,系统会及时发出警报,提醒操作人员采取必要的措施。这种预警机制不仅可以降低设备故障率,还能减少因意外停机带来的经济损失。通过对数据的智能分析,企业可以优化设备的维护计划,延长设备的使用寿命。上海诺尚信息技术有限公司自2005年成立以来,一直致力于提供智能化的工业物联网解决方案,帮助企业提升生产效率和安全性。公司在斗轮机工业安全监测系统方面的技术积...
发布时间:2026.01.14 -
广东自动报表生成工业安全监测系统
在煤矿生产和大型料场中,安全监测系统的自动寻检功能显得尤为重要。煤场工业安全监测系统通过先进的传感器技术,实现了全天候的自动化监测。这一系统不仅能够实时采集现场数据,还具备智能分析和自燃趋势预警的能力。通过自动寻检,系统能够检测到煤炭堆积过程中可能出现的过热现象,从而有效预防自燃事件的发生。系统的自动化功能减少了人工巡检的频率,提高了安全监测的效率和准确性,确保了煤场的安全运行。上海诺尚信息技术有限公司自2005年成立以来,一直致力于为客户提供高效、安全、智能的解决方案,帮助企业提高生产效率和安全性,降低运营成本。通过部署明火煤监测系统,企业能够实时监控输煤皮带上的煤炭温度,及时发现火源,采取...
发布时间:2026.01.13 -

山东工业安全监测系统高灵敏度的优点
燃料系统的安全巡检在发电厂及燃煤电厂的日常运行中承担着关键职责。燃料系统安全巡检机器人配备了多种传感器,如温湿度检测、有毒气体监测和高清摄像头,能够持续采集燃料输送设备及周边环境的多维数据。机器人具备全天候自主巡检能力,能够定期获取设备外观、红外热像、气体浓度及噪声水平等信息,协助及时识别设备异常和潜在风险。通过数据传输至云端平台,结合大数据分析与算法模型,系统实现了对设备状态的动态监控和运行效率的辅助评估,有助于降低能源消耗及维护费用。这类机器人适用于环境复杂且人工巡检难以频繁执行的场景,能够减少因人为疏忽或环境限制带来的安全隐患。机器人支持智能报警和应急联动功能,能够快速响应设备异常,保障...
发布时间:2026.01.13 -
江苏工业安全监测系统料场红外温度操作方法
在煤矿生产中,煤炭自燃是一种常见但极具危险性的现象。由于煤炭在堆积过程中会因氧化作用产生热量,若未能及时散发,温度升高便可能引发自燃。为了有效预防这一风险,煤炭自燃工业安全监测系统应运而生。该系统通过现场传感器实时采集煤炭堆积区的温度、湿度等数据,并将其传输至控制室进行分析。通过智能化的数据分析和自燃趋势预警,系统能够提前识别潜在的自燃风险,提供精确的预警信息。这不仅为煤矿企业的安全管理提供了有力支持,也为生产效率的提升奠定了基础。上海诺尚信息技术有限公司自2005年成立以来,专注于工业物联网技术的研发与应用,致力于为客户提供高效、安全的智能解决方案,以提升企业的生产效率和安全性为目标。公司在...
发布时间:2026.01.12 -
山西工业安全监测系统明火煤自动录像
输煤皮带负责工业生产的物料输送,其安全运行关系到生产流程的连续性。工业安全监测系统的远程通信功能为输煤皮带的安全管理提供了创新的解决方案。通过远程通信,管理人员能够在监控中心实时查看输煤皮带的运行状态,及时获取温度、明火等关键数据。系统的远程通信功能允许对前端红外摄像机的焦距和云台运动进行远程操作和控制,确保了监控的灵活性。用户在使用过程中发现,通过远程通信功能,不仅可以实现对现场设备的实时监控,还能在异常情况出现时快速响应,减少了事故发生的可能性。上海诺尚信息技术有限公司凭借成熟的技术和丰富的经验,成功将煤场智能一体化平台应用于多家大型企业,并获得了客户的认可。公司始终以专业、热情的服务态度...
发布时间:2026.01.11 -
广东工业安全监测系统集成平台应用效果
在燃煤电厂的日常运营中,安全监测系统扮演着至关重要的角色。针对燃煤电厂,工业安全监测系统的开发需要考虑多方面的因素,包括有毒气体、粉尘浓度、明火煤、红外温度等多种监测需求。燃煤电厂的环境复杂,温度和气体浓度的变化可能直接影响到设备的正常运转和人员的安全。因此,开发一套高效的工业安全监测系统,能够帮助电厂实时掌握各项关键指标。通过先进的传感器技术和自动化数据分析功能,系统可以实现全天候的环境监测,并在检测到异常情况时及时发出预警信号。这不仅提高了电厂的安全系数,也减少了因事故导致的停机时间,从而提升了整体的运营效率。上海诺尚信息技术有限公司作为一家专注于智能信息技术的企业,致力于为燃煤电厂提供高...
发布时间:2026.01.10 -
山西工业安全监测系统红外温度多少钱
程诊断工业安全监测系统的应用效果在现代工业领域中表现出色。该系统通过远程连接技术,实现了对生产设备的实时监控和诊断。技术人员可以通过远程访问系统,查看设备的运行状态和历史数据,快速识别故障原因并提供解决方案。这种远程诊断能力明显提升了设备维护的效率,减少了现场人员的工作负担。系统的应用不仅提高了生产的安全性,还降低了设备故障率和维护成本。用户在使用过程中可以享受到更加便捷的服务体验,设备的稳定运行为企业带来了持续的经济效益。上海诺尚信息技术有限公司凭借其丰富的经验和先进的技术,为客户提供了可靠的远程诊断解决方案,助力企业实现安全、高效的生产运营。先进的粉尘浓度监测技术帮助煤矿企业及时检测粉尘浓...
发布时间:2026.01.10 -
浙江工业安全监测系统燃煤电厂实时数据采集
在工业生产环境中,安全监测系统的实时性是实现有效预警与精确干预的基础要求。全天候工业安全监测系统的设计初衷是为了解决传统监测方法的滞后性和不准确性。在煤矿企业的日常运营中,环境的复杂性和潜在风险的多样性对监测系统提出了更高的要求。通过全天候监测,系统能够在任何时间段内提供持续的数据采集和分析,确保各类安全隐患能够被及时识别和处理。这种实时监测不仅可以提高企业的安全系数,还能有效降低因安全事故而导致的停工损失。系统采用先进的传感器技术,能够对有毒气体、粉尘浓度、明火煤、红外温度等多种参数进行监测。通过智能数据分析和自燃趋势预警功能,企业可以提前采取措施,避免事故的发生。上海诺尚信息技术有限公司自...
发布时间:2026.01.09 -

山西工业安全监测系统远程诊断开发
在煤炭转运过程中,安全监测系统的性价比是企业关注的重点。该系统通过智能传感器和数据分析模块,实时监控煤炭转运过程中的各种安全指标,如粉尘浓度、气体泄漏等。高效的数据处理能力使得该系统能够迅速识别异常情况,避免事故发生。对于企业而言,投资于这样的监测系统不仅是对安全的保障,更是对成本的有效控制。通过减少事故发生的频率,企业可以明显降低安全事故带来的经济损失。上海诺尚信息技术有限公司以其成熟的技术和丰富的经验,成功将煤场智能一体化平台在华电集团、国家能源、国家电投等实施应用,并且取得客户一致认可和好评。煤矿企业可以利用智能化监测系统,对煤场和矿井的安全状况进行24小时不间断监控,减少安全隐患。山西...
发布时间:2026.01.09 -
河北工业安全监测系统自动监测自动寻检
在大型料场的管理中,如何高效地监测和管理储存的煤炭是一个重要的课题。圆形料场工业安全监测系统通过自动报表生成功能,为管理人员提供了一个强有力的工具。煤炭长期储存过程中,因氧化作用可能发生自燃,严重威胁到设施和人员的安全。通过该系统,管理人员可以轻松获取煤炭温度、气体浓度等关键数据,并自动生成详细的报表。这些报表不仅提供了实时的监测数据,还包括对历史数据的分析,帮助管理人员制定更有效的安全策略。通过红外温度监测和智能分析,该系统能够提前预警潜在的自燃风险,避免不必要的经济损失。上海诺尚信息技术有限公司凭借其在智能信息技术领域的丰富经验,为料场管理提供了可靠的解决方案,助力企业实现安全高效的生产运...
发布时间:2026.01.08 -
陕西远程通信工业安全监测系统
在工业生产环境中,安全监测系统的实时性是实现有效预警与精确干预的基础要求。全天候工业安全监测系统的设计初衷是为了解决传统监测方法的滞后性和不准确性。在煤矿企业的日常运营中,环境的复杂性和潜在风险的多样性对监测系统提出了更高的要求。通过全天候监测,系统能够在任何时间段内提供持续的数据采集和分析,确保各类安全隐患能够被及时识别和处理。这种实时监测不仅可以提高企业的安全系数,还能有效降低因安全事故而导致的停工损失。系统采用先进的传感器技术,能够对有毒气体、粉尘浓度、明火煤、红外温度等多种参数进行监测。通过智能数据分析和自燃趋势预警功能,企业可以提前采取措施,避免事故的发生。上海诺尚信息技术有限公司自...
发布时间:2026.01.07 -
陕西工业安全监测系统明火煤应用效果
粉尘和扬尘问题在工矿企业中是一个常见的挑战,不仅影响环境,还可能对员工的健康产生不利影响。粉尘扬尘工业安全监测系统实时监测提供了一种有效的解决方案,通过先进的光散射技术,能够快速准确地检测空气中的粉尘浓度。系统采用红外激光器和进口光电倍增管,将粉尘的散射光强度转换成电信号,并通过预置的参数直接计算出粉尘的质量浓度。该系统还具备自动报警功能,当粉尘浓度超标时,会发出声光报警,提醒工作人员及时处理。这种实时监测不仅提高了环境安全,还帮助企业遵守相关的环保法规。上海诺尚信息技术有限公司始终坚持“一诺千金,崇尚科技”的理念,致力于通过技术创新提升企业的生产效率和安全性。挡煤墙罐壁温度监测系统利用温度传...
发布时间:2026.01.07 -
陕西工业安全监测系统输煤皮带自动报表生成
工业安全监测系统的远程通信功能,为企业提供了更为灵活和高效的监测手段。通过集成平台,企业可以在任何地方对现场设备进行监控和操作。这种远程通信技术不仅支持实时数据传输,还能够在异常情况发生时,迅速发送报警信息,确保问题能够得到及时处理。用户在使用过程中,可以通过移动设备或电脑终端,随时查看监测数据和系统状态,极大地提高了管理的便利性。上海诺尚信息技术有限公司在此领域的技术创新,使得远程通信成为企业安全管理的重要工具,为客户提供了更为安全和高效的解决方案。煤场的红外温度监测系统能够全天候进行温度监测,一旦发现异常,系统会自动发出警报,提前进行自我保护。陕西工业安全监测系统输煤皮带自动报表生成在大型...
发布时间:2026.01.07 -
浙江工业安全监测系统圆形料场怎么样
输煤集控室的运行状态通过安全监测系统与整个生产流程紧密相连,其数据的准确性与及时性直接影响着生产的稳定与连续。工业安全监测系统通过先进的传感器和监测设备,实现了输煤集控室内的实时数据采集。该系统能够精确捕捉环境中的变化,包括有毒气体浓度、粉尘水平和温度动态,为操作人员提供了安全监测视图。实时数据采集不仅提高了监测的准确性,还为企业的安全管理提供了可靠的依据。通过这些数据,企业可以制定更为有效的安全策略,确保生产的连续性和安全性。上海诺尚信息技术有限公司始终坚持“一诺千金,崇尚科技”的理念,与多所高校建立科研合作关系,将技术科研成果转化为实际应用的工业产品,提升了公司的科研实力。煤矿企业的安全管...
发布时间:2026.01.06 -

广东工业安全监测系统气体泄漏的作用
在煤矿生产和大型料场中,安全监测系统的自动寻检功能显得尤为重要。煤场工业安全监测系统通过先进的传感器技术,实现了全天候的自动化监测。这一系统不仅能够实时采集现场数据,还具备智能分析和自燃趋势预警的能力。通过自动寻检,系统能够检测到煤炭堆积过程中可能出现的过热现象,从而有效预防自燃事件的发生。系统的自动化功能减少了人工巡检的频率,提高了安全监测的效率和准确性,确保了煤场的安全运行。上海诺尚信息技术有限公司自2005年成立以来,一直致力于为客户提供高效、安全、智能的解决方案,帮助企业提高生产效率和安全性,降低运营成本。为保证煤矿和火电厂的安全,现代化的工业安全监测系统可以通过云平台将数据同步上传,...
发布时间:2026.01.06 -
陕西工业安全监测系统自动监测操作方法
在煤矿生产和火电厂的日常运营中,温度监测是确保设备安全运行的重要环节。挡煤墙罐壁温度工业安全监测系统通过智能化的传感器技术,为企业提供了实时的温度数据采集和分析功能。该系统能够自动生成详细的报表,为管理层提供可靠的数据支持。这种自动化的监测系统不仅提高了工作效率,还有效降低了安全隐患。通过实时监测和数据分析,企业能够及时发现潜在的温度异常,并采取相应措施,避免可能发生的火灾事故。上海诺尚信息技术有限公司是一家专注于智能信息技术的工业物联网集成公司,致力于为客户提供高效、安全、智能的解决方案,以提高企业的生产效率和安全性,降低运营成本为目标。依托成熟技术和丰富经验,上海诺尚已在华电集团、国家能源...
发布时间:2026.01.06 -
江苏工业安全监测系统煤矿企业在线监测
在煤矿和电力行业中,挡煤墙罐壁的温度监测是确保设备正常运行的关键因素。挡煤墙罐壁温度工业安全监测系统通过自动录像功能,能够详细记录温度变化的全过程,这为后续的分析和决策提供了宝贵的数据支持。系统通过高精度的温度传感器,实时捕捉墙体温度的细微变化,并将数据传输至控制系统进行存储和分析。这种自动化的监测方式不仅提升了安全管理的效率,也为管理层提供了准确的决策依据。上海诺尚信息技术有限公司以其丰富的经验和技术实力,帮助众多企业实现了设备的智能化管理,确保了生产的安全和稳定。大型料场通过部署工业安全监测系统,实现煤堆温度、粉尘浓度、烟雾等多项数据实时监控,提升安全管理效率。江苏工业安全监测系统煤矿企业...
发布时间:2026.01.05 -
山西工业安全监测系统输煤集控室精确定位报警
在工业生产环境中,安全监测系统的灵敏度是确保工人安全和生产效率的关键因素。高灵敏度的监测设备能够及时捕捉环境中的微小变化,例如有毒气体的浓度、粉尘的密度以及温度的异常波动,帮助企业提前预警潜在的安全风险。对于煤矿生产、石化行业等高风险领域,选择一款可靠的工业安全监测系统尤为重要。上海诺尚信息技术有限公司自2005年成立以来,专注于智能信息技术的研发与应用,致力于为客户提供高效、安全的解决方案。公司在工业物联网领域积累了丰富的经验,尤其在煤场智能监测方面,凭借先进的技术和设备,赢得了客户的认可。通过与上海交通大学等高校的合作,公司将科研成果转化为实际应用的工业产品,进一步提升了产品的可靠性和精确...
发布时间:2026.01.04 -
广东工业安全监测系统全天候自动寻检
煤矿生产智能巡检系统以动态监控矿区设备和环境为导向,旨在保障生产安全与效率。系统集成温湿度传感器、有毒气体探测器及高清摄像机,实时采集矿井及地面设备的运行数据。采集信息通过无线网络传输至云端,借助智能算法模型进行数据融合与分析。基于预测性分析,系统能够评估设备运行状态,及时发现异常指标并发出预警,辅助管理人员快速定位潜在风险。智能报警和应急联动设计确保异常事件得到及时响应。巡检机器人具备自主导航、避障及自动充电功能,能够在复杂矿区环境中持续作业,完成设备表面、仪表读数及环境参数的自动采集。后台调度管理和数据存储功能支持远程监控巡检进度与结果,实现煤矿生产流程的智能调度与优化。上海诺尚信息技术有...
发布时间:2026.01.03 -
北京工业安全监测系统智能联动安装流程
在燃煤电厂的日常运营中,安全监测系统扮演着至关重要的角色。针对燃煤电厂,工业安全监测系统的开发需要考虑多方面的因素,包括有毒气体、粉尘浓度、明火煤、红外温度等多种监测需求。燃煤电厂的环境复杂,温度和气体浓度的变化可能直接影响到设备的正常运转和人员的安全。因此,开发一套高效的工业安全监测系统,能够帮助电厂实时掌握各项关键指标。通过先进的传感器技术和自动化数据分析功能,系统可以实现全天候的环境监测,并在检测到异常情况时及时发出预警信号。这不仅提高了电厂的安全系数,也减少了因事故导致的停机时间,从而提升了整体的运营效率。上海诺尚信息技术有限公司作为一家专注于智能信息技术的企业,致力于为燃煤电厂提供高...
发布时间:2026.01.02 -
北京工业安全监测系统粉尘浓度自动录像
在工业安全监测中,远程诊断技术的引入为企业提供了更为灵活和高效的安全管理方式。远程诊断工业安全监测系统能够通过网络连接,实现对现场设备的远程监控和参数调整。以石化行业为例,远程诊断系统可以实时传输现场的温度、气体浓度等数据至监控中心,技术人员无需亲临现场即可对设备运行状况进行评估。当系统检测到潜在风险时,能够迅速采取措施,避免事故发生。这种远程操作的便捷性,使得企业在降低人力成本的同时,也提升了安全管理的响应速度。上海诺尚信息技术有限公司作为一家专注于工业物联网集成的企业,凭借其在智能技术领域的丰富经验,为客户提供了可靠的远程诊断解决方案,帮助企业在安全管理中取得了明显成效。为保证煤矿和火电厂...
发布时间:2025.12.31 -
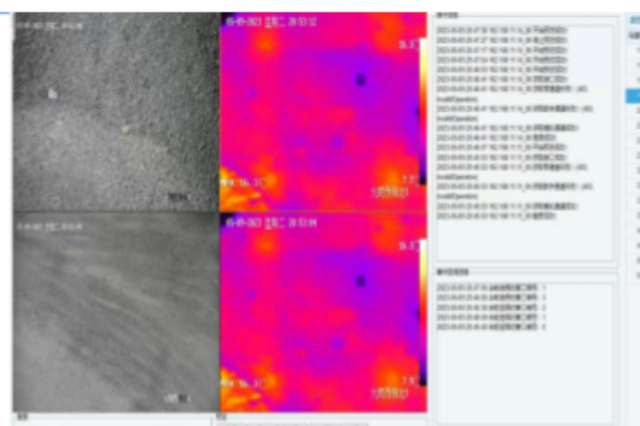
江苏工业安全监测系统有毒气体数据分析
在大型料场中,工业安全监测系统的工作原理主要依赖于多种传感器的综合应用。这些传感器被 安装在料场的关键位置,用于监测温度、气体浓度以及粉尘等环境因素。系统通过无线网络将采集到的数据传输至监控室,便于管理人员实时查看和分析。红外热成像技术是其中的一项主要技术,它能够在不接触物体的情况下,准确测量物体表面的温度变化。这对于防止煤堆自燃等潜在风险尤为重要。当系统检测到温度或气体浓度超出安全阈值时,会自动触发报警机制,提醒工作人员采取相应的安全措施。通过这种方式,料场的安全性得到了有效保障。上海诺尚信息技术有限公司在这一领域积累了丰富的经验,凭借其成熟的技术和完善的服务,帮助多个大型料场实现了智能化...
发布时间:2025.12.31 -
浙江工业安全监测系统大型料场数据分析
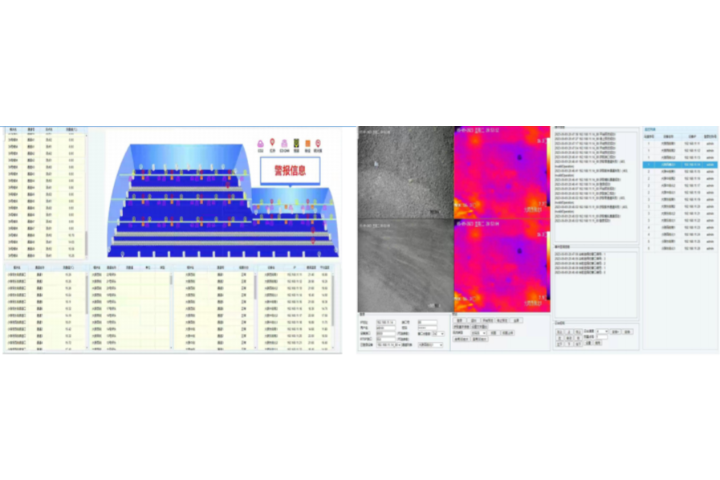
一体化工业安全监测系统在工业领域的应用,极大地提升了安全管理的效率。它整合了多种监测功能,如红外温度监测、有毒气体监测、粉尘浓度监测等,形成一个安全监测网络。在一个繁忙的火电厂,操作人员通过一体化系统的界面,实时查看各个监测点的数据。这些数据不仅包括当前的环境状态,还提供了历史趋势分析,有助于预测潜在的安全隐患。系统的智能化设计,使得数据采集和分析更加高效,操作人员可以轻松识别异常情况并采取相应措施,确保生产的连续性和安全性。上海诺尚信息技术有限公司通过与高校合作,将先进的科研成果转化为实用的工业产品,提升了公司的科研实力。我们始终秉承专业、热情的服务态度,为客户提供质优的产品和服务。智能化的...
发布时间:2025.12.31 -
河北工业安全监测系统斗轮机自动寻检
设备自检测功能是室内轮式升降巡检机器人维护自身健康状态的重要保障。机器人在启动后会自动执行对电源系统、驱动机构、通信模块以及搭载传感器的检测,及时发现潜在异常。异常情况通过声光报警提示现场人员,并在通信正常的情况下将故障信息上传至监控中心,便于远程诊断和快速处理。使用流程简洁,操作者只需通过本地监控平台或远程管理系统启动机器人,系统会自动完成自检程序,确认设备状态后进入巡检模式。该功能有效减少因设备故障而产生的巡检盲区,确保数据采集的准确性和巡检任务的顺利开展。机器人支持巡检任务的定时及周期设置,结合自检结果调整运行策略,以提升整体巡检效率。上海诺尚信息技术有限公司凭借多年智能巡检系统的研发经...
发布时间:2025.12.29 -
煤场自动录像工业安全监测系统
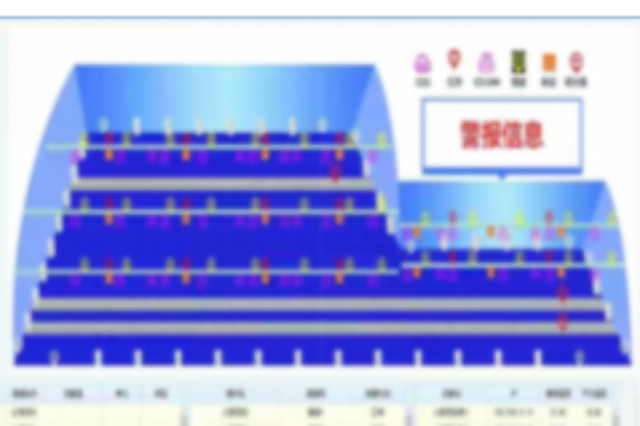
大型料场的安全管理面临着诸多挑战,尤其是在监测和预警方面。工业安全监测系统软件通过整合多种监测技术,为料场提供了安全保障。软件的关键在于其强大的数据处理能力,能够实时接收来自现场的温度、气体、粉尘等多种传感器数据,并进行智能分析。通过图形化的用户界面,操作人员可以直观地查看各项安全指标的实时状态,并根据系统提供的预警信息及时采取措施。软件还支持历史数据的存储和分析,帮助管理层了解长期的安全趋势和潜在风险。系统的灵活性允许根据不同料场的具体需求进行定制,确保每个环节的安全监测都能够精确到位。上海诺尚信息技术有限公司以其强大的研发能力和丰富的行业经验,为客户提供量身定制的解决方案,助力企业实现安全...
发布时间:2025.12.28 -
陕西工业安全监测系统煤矿企业应用效果
在工业生产环境中,粉尘和扬尘的存在不仅影响空气质量,还对设备和人员的健康构成潜在威胁。尤其是在煤矿和大型料场等场所,粉尘浓度的监测变得尤为重要。通过粉尘扬尘工业安全监测系统,企业能够实现对空气中粉尘浓度的实时监控。当粉尘浓度超过安全阈值时,系统会自动触发预警,提醒相关人员采取必要的防护措施。这一系统采用先进的红外激光技术,能够快速感知空气中粉尘的变化,并将数据传输至控制系统,便于管理人员进行远程监控和分析。用户可以通过系统界面查看实时数据,确保生产环境的安全性和稳定性。上海诺尚信息技术有限公司自2005年成立以来,专注于智能信息技术的研发和应用,致力于为客户提供高效、安全的工业物联网解决方案,...
发布时间:2025.12.27 -
山西工业安全监测系统料场红外温度的作用
输煤集控室是煤矿和电力行业的重要枢纽,其安全运行直接影响到整个生产流程的顺畅。输煤集控室工业安全监测系统的自动寻检功能,通过智能化的传感器布局,实现了对集控室环境的全天候监控。系统能够自动识别潜在的安全隐患,并在及时发出预警信号,让操作人员及时采取措施。这种主动式的安全管理方式,极大地减少了人为因素导致的安全事故,提高了生产的连续性和稳定性。作为一家专注于智能信息技术的公司,上海诺尚信息技术有限公司通过不断的技术创新,为客户提供了可靠的安全监测解决方案,助力企业实现安全、高效的生产目标。斗轮机的安全监测系统结合高精度的传感器,能够及时反馈其工作状态,帮助企业避免设备故障导致的生产停滞。山西工业...
发布时间:2025.12.27 -
山东工业安全监测系统斗轮机哪家好
在工业生产环境中,气体泄漏不仅会影响生产效率,还可能对员工的健康和安全构成威胁。为了及时检测和预防潜在的气体泄漏事故,气体泄漏工业安全监测系统在线监测成为了必不可少的工具。这个系统通过先进的传感器技术,能够实时监测空气中的有毒气体浓度,如一氧化碳、甲烷和二氧化硫等。当气体浓度达到预设的警戒值时,系统会自动触发报警机制,以提醒现场工作人员采取必要的安全措施。通过这样的实时监测,企业能够有效降低事故发生的概率,确保生产环境的安全性。上海诺尚信息技术有限公司成立于2005年,是一家专注于智能信息技术的工业物联网集成公司。我们致力于为客户提供高效、安全、智能的解决方案,以提高企业的生产效率和安全性,降...
发布时间:2025.12.26 -
广东工业安全监测系统输煤集控室自动寻检
在现代工业环境中,安全监测成为不可或缺的一环。尤其是在煤矿和燃煤电厂等高风险场所,远程诊断工业安全监测系统的应用显得尤为重要。想象一下,一个煤矿工人在工作时,突然闻到一股异味,他立刻意识到可能存在有毒气体泄漏的风险。此时,远程诊断系统通过现场传感器捕捉到异常数据,并迅速将信息传递给控制中心。控制中心的工作人员可以立即采取行动,启动排风系统,确保工人的安全。这种实时监测和快速响应的能力,是远程诊断系统的主要优势。它不仅提高了工作环境的安全性,还减少了事故发生的可能性。通过智能数据分析和自动报警功能,系统能及时预警潜在的安全风险,为企业的安全管理提供了强有力的支持。上海诺尚信息技术有限公司自200...
发布时间:2025.12.26 -
江苏工业安全监测系统料场红外温度的优点
在工业生产环境中,气体泄漏不仅会影响生产效率,还可能对员工的健康和安全构成威胁。为了及时检测和预防潜在的气体泄漏事故,气体泄漏工业安全监测系统在线监测成为了必不可少的工具。这个系统通过先进的传感器技术,能够实时监测空气中的有毒气体浓度,如一氧化碳、甲烷和二氧化硫等。当气体浓度达到预设的警戒值时,系统会自动触发报警机制,以提醒现场工作人员采取必要的安全措施。通过这样的实时监测,企业能够有效降低事故发生的概率,确保生产环境的安全性。上海诺尚信息技术有限公司成立于2005年,是一家专注于智能信息技术的工业物联网集成公司。我们致力于为客户提供高效、安全、智能的解决方案,以提高企业的生产效率和安全性,降...
发布时间:2025.12.23
