-
 10 06郑州检验检测机械结构设计研发服务
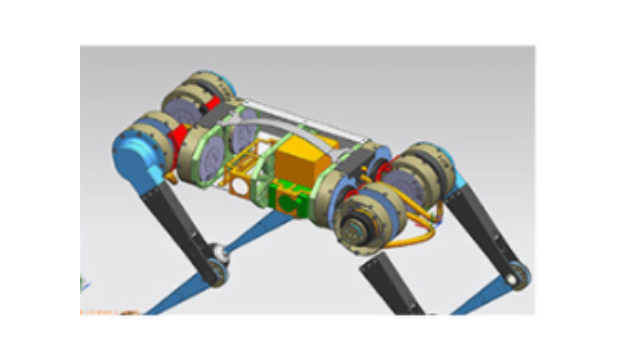
10 06郑州检验检测机械结构设计研发服务精歧创新专注机器人同构臂抗疲劳机械结构设计优化,针对工业长时间连续作业工况,提升结构抗损耗、抗形变、高精度长效保持能力。工业自动化生产线多为24小时不间断作业模式,机器人同构臂需要高频次完成抓取、升降、摆动、旋转等往复动作,长期循环受力会导致普通结构出现应力累积、连杆形变、关节松动、配合间隙变大等问题,直接造成设备作业精度下降、双臂协同错... 【查看详情】
-
 09 06广东电子机械结构设计工厂
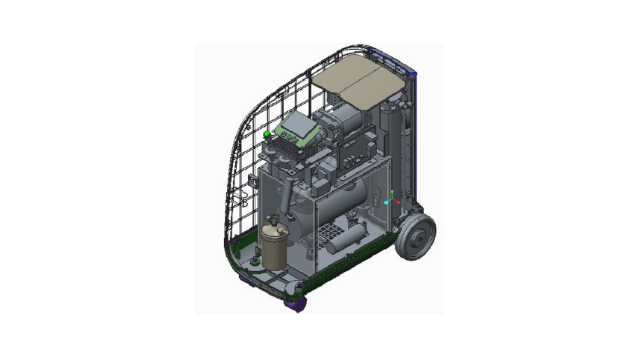
09 06广东电子机械结构设计工厂精歧创新:全自动运载机器人产品原型机设计研发,机械结构匹配无人化作业需求 精歧创新融合 AI 技术于研发,为全自动运载机器人设计研发产品原型机,机械结构设计匹配无人化作业的精细与智能需求。机械结构采用智能感应机身框架,确定全自动 AGV 驱动方式,规划无人导航、自动装卸、避障模块布局,优化感应精度提升无人作业能力。硬件完成... 【查看详情】
-
 09 06郑州新能源机械外观设计开发
09 06郑州新能源机械外观设计开发精歧创新聚焦机器人同构臂高精度作业需求,从机械结构设计层面优化重复定位精度,攻克工业精细作业误差超标的行业难题。机器人同构臂多用于精密分拣、零部件装配、小件搬运等高精度工序,机械结构的配合间隙、构件形变、关节精度是影响作业精度的因素,传统结构设计因公差把控宽松、结构刚性不足,难以满足微米级作业需求。我们在机械结构设计过程中,严格细化各连杆... 【查看详情】
-
 09 06广州电路机械结构设计定制
09 06广州电路机械结构设计定制精歧创新围绕引导机器人商用落地需求,优化机械结构设计,兼顾场景适配性、运行稳定性与外观美观度,实现结构、颜值、性能三位一体。商用引导机器人对机身造型、行走平稳性、防护能力有着严苛要求,普通结构设计容易出现机身单薄、行走晃动、缝隙密封性差、外观造型生硬等问题,影响品牌展示效果与设备使用寿命。我们在机械结构设计过程中,结合ID工业外观设计流线... 【查看详情】
-
 08 06重庆光电机械外观设计生产加工
08 06重庆光电机械外观设计生产加工精歧创新依托量产导向型设计思维,优化运载机器人可量产机械结构设计,解决行业样机结构难以量产、非标件过多、装配繁琐、良品率低的普遍痛点。很多运载机器人原型机机械结构满足实验测试需求,设计过程中未考虑批量生产工艺,存在大量非标异形结构、复杂内嵌造型、装配工序繁琐、零件通用性差等问题,一旦进入量产阶段,会出现加工难度大、改模成本高、装配误差大、... 【查看详情】
-
 08 06黑龙江电子机械外观设计解决方案
08 06黑龙江电子机械外观设计解决方案精歧创新专注机器人同构臂机械结构迭代升级,结合场景化作业需求优化结构布局,解决设备狭小空间作业适配性差、结构干涉频发的问题。工业自动化生产线空间紧凑,机器人同构臂需要在有限区域内完成多角度、多姿态作业,常规结构设计容易出现连杆过长、结构臃肿、转动死角多、双臂干涉等问题,限制设备作业范围与适配场景。我们在机械结构设计阶段,精细测算作业空间尺... 【查看详情】
-
 08 06定制化生产管理定制化参考服务
08 06定制化生产管理定制化参考服务精歧创新累计服务超千余家企业,为教育机器人提供全流程生产管理服务,聚焦工艺优化与质量管控。工艺梳理:细分教育机器人的教学交互模块、机械结构等图纸工艺,选择环保、耐用材料,编写标准化生产工艺流程,规范装配与调试环节。质量把控:针对教育机器人的操作安全性、功能稳定性等进行多轮检测,确保产品符合教育场景使用要求。成本核算:提供透明的样机价格评估... 【查看详情】
-
 08 06郑州机械外观设计服务商
08 06郑州机械外观设计服务商精歧创新从运维便捷性角度优化引导机器人机械结构设计,解决传统设备结构集成度高、拆装繁琐、故障排查难、运维成本高的问题。传统引导机器人机械结构多采用整体封闭式集成设计,内部硬件、传感模块、传动结构全部隐藏在机身内部,设备出现故障或需要定期保养时,需要拆解大量外壳结构,拆装流程复杂、耗时费力,且容易造成二次结构损伤,大幅提升后期运维成本。我们... 【查看详情】
-
07 06广州医疗机械外观设计企业
精歧创新针对性优化运载机器人轻量化机械结构设计,在保障重载性能的前提下实现机身减负,解决传统工业运载机器人自重过大、能耗偏高、转向笨拙的行业短板。传统运载机器人为提升承重能力,普遍采用厚重的钢结构设计,整机自重偏高,不仅导致设备启动、制动能耗大幅增加,续航时长缩短,还会造成设备转向迟钝、场地通行灵活性不足,难以适配狭窄仓储通道作业场景。我... 【查看详情】
-
 07 06半导体机械结构设计费用
07 06半导体机械结构设计费用精歧创新:引导机器人产品原型机设计研发,全栈打通机械与软硬件协同链路 精歧创新累计服务超 1100 家中小企业,为引导机器人提供产品原型机设计研发全栈服务,覆盖机械、硬件、软件控制环节。机械结构设计上,确定轮式驱动运动方式,规划激光雷达、传感器等元器件布局,经结构评审、打板验证优化机身框架,兼顾轻量化与运行稳定性。硬件端完... 【查看详情】
-
 07 06江苏专业机械外观设计企业
07 06江苏专业机械外观设计企业精歧创新针对性优化运载机器人轻量化机械结构设计,在保障重载性能的前提下实现机身减负,解决传统工业运载机器人自重过大、能耗偏高、转向笨拙的行业短板。传统运载机器人为提升承重能力,普遍采用厚重的钢结构设计,整机自重偏高,不仅导致设备启动、制动能耗大幅增加,续航时长缩短,还会造成设备转向迟钝、场地通行灵活性不足,难以适配狭窄仓储通道作业场景。我... 【查看详情】
-
06 06浙江新能源机械外观设计开发
精歧创新依托一站式机器人全流程研发体系,主打引导机器人机械结构一体化设计服务,实现机械结构、硬件布局、软件控制、ID工业外观、精密加工制造的高度协同落地。众多初创研发项目在引导机器人开发过程中,普遍存在结构设计与软硬件、外观脱节的问题,机械结构定型后,常出现传感器遮挡、硬件安装空间不足、机身开孔错位、外观造型与结构等问题,需要反复改模返工... 【查看详情】

