智能仓储机器人(AGV/AMR)在仓库中穿梭运行,与人员、叉车、货架之间存在复杂的交互风险。传统的激光雷达或超声波避障传感器多用于检测障碍物,但对人员识别不够精细。大德恒通防撞传感器可部署在仓储机器人的关键位置或仓库的固定点位,实时检测人员是否进入机器人的运行路径。当检测到人员靠近时,机器人可主动减速或绕行;若人员突然闯入危险区,则立即紧急停止。传感器支持自定义多边形防护区域,可适应仓库中不规则的货架布局和通道形状。这种针对性的防护能力,***提升了人机混行仓库的安全性。工作电压DC24V±5%,标准工业电源即可驱动。福建3D立体空间安全防护防撞传感器售后服务
行吊设备在重工业车间中用于吊运钢材、铸件等物料。行吊的大车沿厂房长度方向移动,小车沿大车横梁移动,吊钩上下升降。立体空间防护传感器安装在大车端梁和小车架体上。传感器监测行吊运行前方是否有人员、设备或物料堆放。当大车向前移动时,前方传感器持续测量与**近障碍物的距离。距离数值在操作室内的显示屏上实时更新。当距离小于安全阈值时,声光报警器启动,提示操作人员注意。操作人员未及时减速的情况下,传感器触发自动减速电路,大车电机转速自动下降。距离继续缩短至极限值时,制动器直接吸合,大车停止。传感器对金属和非金属障碍物均有响应能力。检测到悬挂的钢索或软性遮挡物时,输出信号同样有效。在粉尘较多的铸造车间,传感器外壳采用密封结构,内部电子元件不与外界空气接触。进气口装有过滤网,防止粉尘积累影响探测精度。河北激光传感器设备具备场景记忆功能,快速切换不同产线防护模式。

普通视觉传感器在复杂光照或背景杂乱的环境下,容易将阴影、反光或移动的物体误判为人员。大德恒通将高光谱精密算法引入防撞传感器,通过分析物体反射光谱的独特特征来区分不同材质和生命体。高光谱技术能够捕捉人眼不可见的光谱信息,大幅提升识别的准确性和抗干扰能力。即使在强逆光、低照度或背景高度动态变化的场景中,传感器依然能够稳定锁定人员目标。这一技术优势,使得防撞传感器在室外、半室外或光照条件多变的工业现场,依然保持可靠的防护性能。
立体空间防护传感器在自动化饲料包装线中用于检测缝包机前的料袋位置。饲料包装袋在灌装后由传送带送至缝包机进行封口。传感器安装在缝包机入口前方500毫米处,检测料袋是否到达预定位置。料袋到达时光束被遮挡,传感器输出信号触发缝包机启动。缝包机针头在料袋移动过程中完成缝合,料袋通过后传感器光束恢复导通,缝包机停止运行等待下一个料袋。传感器采用对射式光电原理,发射器与接收器分别安装在传送带两侧支架上。饲料车间粉尘浓度较高,普通光电传感器窗口容易积尘导致信号衰减。该传感器窗口配备雨刮式自清洁装置,每隔30分钟刮擦一次窗口表面。雨刮片材料为硅橡胶,动作由微型电机驱动。清洁周期可根据现场粉尘情况通过拨码开关调整,分为15分钟、30分钟、60分钟三档。传感器外壳防护等级为IP65,供电电压为24伏直流。输出形式为继电器触点,触点容量为3安培。安装支架为镀锌钢板冲压件,可沿垂直方向调节200毫米范围。维护人员每周检查雨刮片磨损情况,刮片边缘出现毛刺时更换。接线盒内设有透明观察窗,用于观察继电器动作状态指示灯。可自行搭建防护系统,也可与围栏、光栅、门锁搭配使用。

立体空间防护传感器在粉末冶金压机中用于检测填料高度。金属粉末被填入阴模型腔后,上模冲下压将粉末压制成形。传感器安装在阴模上方,测量填粉后的粉面高度。粉面高度应保持在设定值的正负0.2毫米范围内。高度超出范围时压出的零件密度不合格。传感器在每次填粉后、上模冲下压前进行一次测量。测量值超出允许范围时,压机停止动作并发出报警,等待操作人员调整送粉靴的行程。传感器采用激光三角测量原理,测量范围为10至30毫米,分辨率为0.01毫米。激光波长为650纳米,红色光斑直径为0.5毫米。金属粉末表面粗糙,对激光产生漫反射。传感器接收透镜收集漫反射光,在光电探测器上成像。粉面高度变化时成像位置改变,通过计算像移得出高度值。传感器的测量不受粉末颜色的影响。黑色铁粉和有色金属粉末的测量结果一致。传感器窗口配备压缩空气吹扫装置,防止粉末飘落污染透镜。吹扫气压为0.1兆帕,每次测量前自动吹扫0.5秒。外壳防护等级为IP54,供电为24伏直流。输出为RS485通信接口,与压机控制器交换数据。工业机械协作有保障,大德恒通防撞传感器动态监测,及时规避设备损坏与人员伤害。中国香港机器人防护防撞传感器售后服务
蜂鸣器音量可调,嘈杂环境依然清晰可闻。福建3D立体空间安全防护防撞传感器售后服务
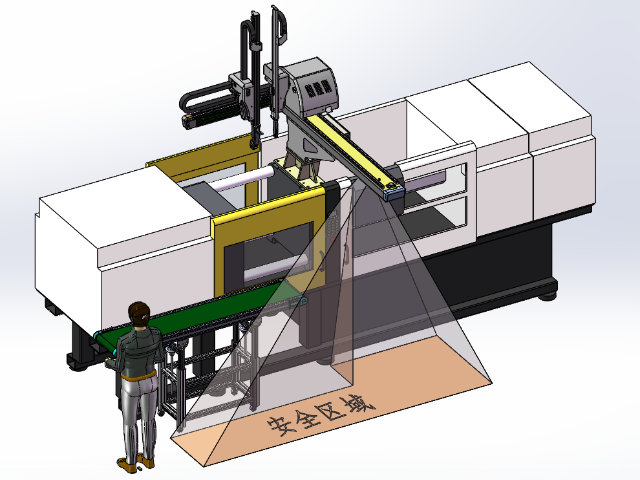
自动化龙门铣床加工大型工件时,龙门框架移动速度较慢但惯性较大。立体空间防护传感器安装在龙门两侧的立柱上,向前后两个方向发射探测波束。当操作人员在龙门行程范围内进行测量或检查时,传感器持续监测人员位置。传感器内部将空间划分为三个区域,每个区域对应不同的设备响应。**外层区域为警告区,人员进入时控制室内蜂鸣器发出间断响声。中间区域为减速区,人员进入时龙门进给速度从每分钟2米降至每分钟0.5米。**内层区域为停止区,人员进入时龙门驱动电机抱闸吸合,运动完全停止。区域边界的距离值通过传感器面板上的按键设定。操作人员根据现场实际情况将停止区边界设置在夹具边缘向外300毫米处。传感器的检测精度在满量程范围内保持一致性。测量距离为5米时误差不超过正负25毫米。安装时使用水平仪校准传感器支架,确保波束轴线与地面平行。接线使用快速插拔接头,更换传感器时不需要重新剥线。福建3D立体空间安全防护防撞传感器售后服务
深圳市大德恒通科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在广东省等地区的机械及行业设备中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同深圳市大德恒通科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!