- 品牌
- 微纳光科
- 型号
- 机械臂
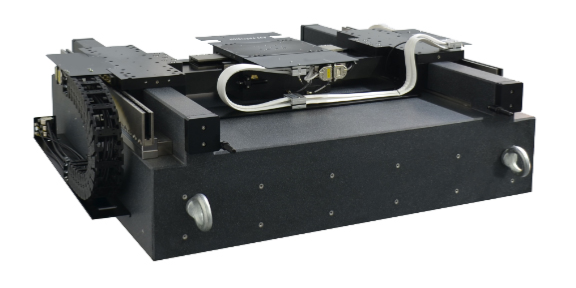
半封闭机械手是一种常见的工业机器人,其工作原理涉及多个方面,包括机械结构、传感器、控制系统等。以下是关于半封闭机械手工作原理的详细解释,希望对您有所帮助。机械结构半封闭机械手通常由多个关节组成,每个关节都有自己的运动范围和自由度。这些关节通过电机、减速器和传动装置等组件驱动,实现机械手的运动。机械手的末端通常安装有夹具或工具,用于抓取、搬运或加工物体。传感器半封闭机械手通常配备各种传感器,用于感知周围环境和监测机械手的状态。常见的传感器包括位置传感器、力传感器、视觉传感器等。这些传感器可以提供机械手所需的信息,如物体的位置、力度、形状等,从而帮助机械手做出相应的动作和调整。 全自动机械臂的应用范围涵盖了各个行业领域。半封闭机械手的校准方法示范
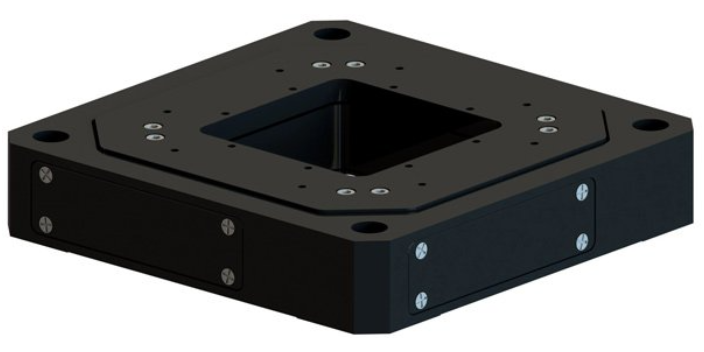
机械臂:工业机械臂的优势在于其高度灵活性和可编程性。通过调整机械臂的关节角度和运动轨迹,可以适应不同的工作场景和任务需求。同时,工业机械臂可以通过编程实现自动化操作,提高生产效率和产品质量,减少人力成本和人为错误。在制造业中,工业机械臂广泛应用于装配线、焊接线、喷涂线等生产线上。它可以完成零部件的搬运和装配,提高生产效率和一致性。同时,工业机械臂还可以进行复杂的焊接和喷涂操作,提高产品质量和外观。全自动机械臂智能机械臂的控制系统越来越智能化和高效。
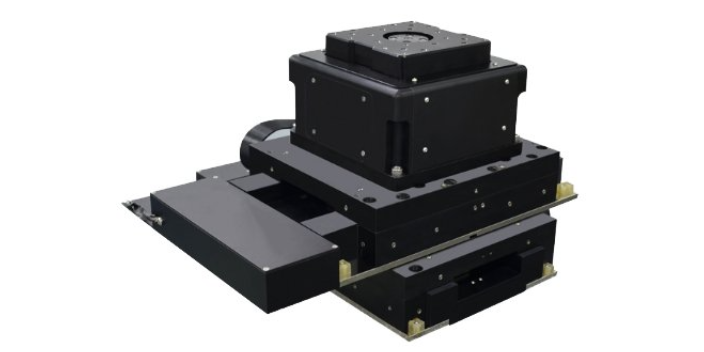
半封闭机械手是一种具有一定自主功能和灵活性的机械装置,通常由多个关节和执行器组成,能够模拟人类手臂的运动和动作。半封闭机械手在工业、医疗、军师、服务机器人等领域都有广泛的应用。以下是半封闭机械手在不同领域的具体应用:工业领域:在工业生产中,半封闭机械手被广泛应用于装配线、自动化生产线、仓储物流等领域。它可以完成重复性高、精度要求高的工作任务,提高生产效率和产品质量。半封闭机械手可以根据不同的生产需求进行编程,实现灵活的生产调度和自动化控制。医疗领域:在医疗领域,半封闭机械手被广泛应用于手术机器人、康复辅助设备等方面。手术机器人可以通过半封闭机械手完成微创手术、精细手术等复杂手术操作,减少手术风险和创伤,提高手术成功率。康复辅助设备可以帮助残疾人士进行康复训练和生活辅助,提高生活质量。
以下是全自动机械臂常见的应用领域:环境清洁全自动机械臂还可以用于环境清洁领域,例如清洁河道、道路、公园等公共场所。机械臂可以代替人工进行清洁工作,提高清洁效率,减少人力成本,同时还可以减少对环境的污染。航天和航空领域全自动机械臂在航天和航空领域的应用也很重要,可以用于航天器的组装、维护和修复,飞机的维护和检修等工作。机械臂可以在太空或高空环境中完成复杂的任务,提高工作效率,减少人员风险。
总的来说,全自动机械臂在各个领域的应用都能够提高工作效率、降低成本、减少人力风险,是现代工业生产和生活中不可或缺的重要设备。 半封闭机械手是什么?
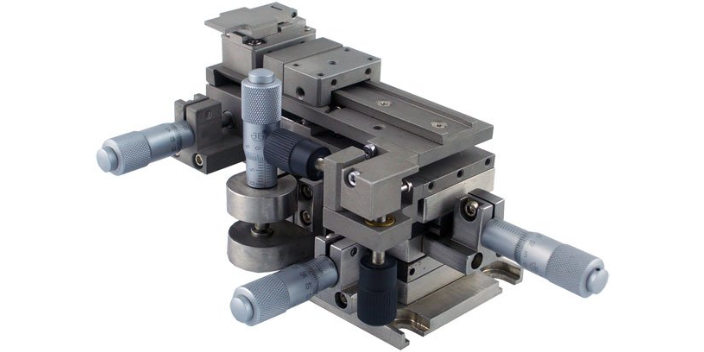
工业机械臂的特点和优势多关节柔性操作:工业机械臂由多个关节组成,可以模拟人体手臂的运动,具有较强的柔性操作能力,可以完成复杂的动作和任务。高精度定位:工业机械臂采用精密的传感器和控制系统,能够实现高精度的定位和操作,保证产品的质量和生产效率。高效节能:工业机械臂可以替代人工完成繁重、危险和重复性的工作,提高生产效率和工作安全性,同时减少人力成本和能源消耗。灵活适应性:工业机械臂可以根据不同的生产需求进行编程和调整,适应不同的工作环境和任务要求,具有较强的灵活性和适应性。数据化管理:工业机械臂可以与生产管理系统和物料管理系统进行数据交互和信息共享,实现生产过程的数字化和智能化管理。全自动机械臂具有高度的灵活性和可编程性。半封闭机械手的校准方法示范
智能机械臂的控制系统可以实现远程监控和操作。半封闭机械手的校准方法示范
机械臂是一种能够模拟人类手臂运动的机器人装置,具有广泛的应用领域,包括工业制造、医疗卫生、防卫、航天航空等。它由多个关节和执行器组成,能够完成各种复杂的动作和任务。机械臂是一种能够模拟人类手臂运动的机器人装置,具有广泛的应用领域。它通过运动控制、感知识别、路径规划和力控制等关键技术,能够完成各种复杂的动作和任务。机械臂在工业制造、医疗卫生、防卫、航天航空等领域的应用案例丰富多样,为人类的生产和生活带来了巨大的便利和效益。半封闭机械手的校准方法示范

半封闭机械手的运动范围通常取决于其设计和结构,因此无法给出具体的5000字的答案。但是,我可以为您提供一些关于半封闭机械手运动范围的一般信息。半封闭机械手是一种常见的工业机器人,通常用于自动化生产线上的装配、搬运和加工等任务。半封闭机械手的运动范围取决于其关节数量、关节类型、工作空间和运动自由度等因素。一般来说,半封闭机械手的运动范围可以分为以下几个方面:关节运动范围:半封闭机械手的每个关节都有一定的运动范围,可以通过控制关节的旋转来实现不同方向的运动。关节的运动范围通常由机械结构和电机控制限制。工作空间范围:半封闭机械手的工作空间范围是指机械手能够覆盖到的三维空间范围。工作空间的大小和形...
- 光学测距仪厂家 2024-05-15
- 四轴机械手的清洁标准 2024-05-15
- 变距滑台多少钱 2024-05-15
- 轻载型开环串联六轴报价 2024-05-15
- 六轴机械手的精度标定 2024-05-14
- 工业机械臂精度 2024-05-14
- 皮带驱动滑台的动态性能 2024-05-14
- 装车机械臂厂家 2024-05-14
- 机械手应用领域的标准合规 2024-05-14
- 工业机械手的协作软件 2024-05-14
- 变距滑台的位置稳定性分析 2024-05-13
- 三轴龙门滑台的位置反馈 2024-05-13
- 直线电机哪家专业 2024-05-13
- 六轴机械手的编程 2024-05-12
- 大理石龙门系统哪家专业 2024-05-12
- 微型直线传动装置哪家好 2024-05-12