晶圆运送机械吸臂是半导体制造过程中不可或缺的重要设备之一。它主要用于将晶圆从一个工序转移到另一个工序,确保晶圆在整个制造过程中的安全和稳定运输。 晶圆运送机械吸臂具有高度的自动化和精确性。它采用先进的自动控制系统,能够准确地定位和抓取晶圆,避免了人为操作的误差和不稳定性。通过精确的控制,晶...
晶圆运送机械吸臂基本参数
- 产地
- 深圳
- 品牌
- 德澳美
- 型号
- 齐全
- 是否定制
- 是
晶圆运送机械吸臂企业商机
控制策略对柔性机械臂的控制一般有如下方式,1)刚性化处理。完全忽略结构的弹性变形对结构刚体运动的影响。例如为了避免过大的弹性变形破坏柔性机械臂的稳定性和末端定位精度NASA的遥控太空手运动的比较大角速度为。2)前馈补偿法。将机械臂柔性变形形成的机械振动看成是对刚性运动的确定性干扰而采用前馈补偿的办法来抵消这种干扰。德国的BerndGebler研究了具有弹性杆和弹性关节的工业机器人的前馈控制。张铁民研究了基于利用增加零点来消除系统的主导极点和系统不稳定的方法设计了具有时间延时的前馈控制器和PID控制器比较起来可以更加明显的消除系统的残余振动。SeeringWarrenP。等学者对前馈补偿技术进行了深入的研究。 对了悬臂式的机械手,还要考虑零件在手臂上布置。佛山新款晶圆运送机械吸臂哪个牌子好

技术实现要素:
本实用新型要解决的技术问题是:现有机械手臂易出现碰撞损伤,且传送晶圆效率较低。
为了解决上述问题,本实用新型的一个实施例提供了一种机械手臂,其包括:托板;固定在所述托板上的绒毛垫,所述绒毛垫至少部分裸露于所述托板的用于承载晶圆的表面,并适于在与所述表面之上的晶圆接触时利用范德华力吸附晶圆。
可选地,所述绒毛垫包括托垫和绒毛,所述托垫固定在所述托板上,所述绒毛固定在所述托垫上。
可选地,所述托板设有贯穿所述表面的螺纹通孔,所述托垫嵌设在所述螺纹通孔内,并通过与所述螺纹通孔螺纹配合的螺钉固定在所述托板上。
可选地,所述绒毛为硅树脂橡胶绒毛或聚酯树胶绒毛。
可选地,所述机械手臂上所有绒毛的黏合力之和为6N以上。
可选地,所述绒毛垫上的绒毛排列成环形。
可选地,所述绒毛垫的数量为三个以上,各个所述绒毛垫之间间隔排布。 佛山新款晶圆运送机械吸臂哪个牌子好机械手臂是机械人技术领域中得到*****实际应用的自动化机械装置.

机械臂的工作原理:
一般机构可由电力、液压、气动、人力驱动。机构有螺纹顶紧机构(如台虎钳)、斜锲压紧、
导杆滑块机构(破碎机常用)、利用重力的自锁机构(如抓砖头的)等等。还有简单的:如可用气(液压)缸直接夹紧的。如果是小物品,可直接购买FESTO等公司的气动手指。
底座是用来安装和固定机器的。
油箱是装润滑油或液压油循环的。
升降位置检测器,要么是确定物体或机器部件是否位于某几个预定高度位置,要么是实时检测其高度的。
手臂回转升降机构就是机械臂在升降的同时也可以旋转的。
手臂伸缩机构是机械臂伸出和缩回的伸缩位置检测器作用基本等同于升降位置检测器,只是测量对象换了。
机械手是能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
基因决定”——生长方法导致若要回答这个问题,首先要说一个大约有100余年历史的原因。。。1918年,前苏联科学家切克劳斯基(Czochralski)建立起来一种晶体生长方法——直拉式晶体生长方法,简称CZ法。硅晶圆的制造可以归纳为三个基本步骤:硅提炼及提纯、单晶硅生长、晶圆成型。首先是硅砂的提纯及熔炼。这个阶段主要是通过溶解、提纯、蒸馏等一系列措施得到多晶硅。接下来是单晶硅生长工艺。就是从硅熔体中生长出单晶硅。高纯度的多晶硅放在石英坩埚中,在保护性气氛中高温加热使其熔化。使用一颗小的籽晶缓慢地从旋转着的熔体中缓慢上升,即可垂直拉制出大直径的单晶硅锭。***一步是晶圆成型。单晶硅锭一般呈圆柱型,直径从3英寸到十几英寸不等。硅锭经过切片、抛光之后,就得到了单晶硅圆片,也即晶圆。 科学家已经研制出了橡胶机器手臂,可以抓起蚂蚁而不是捏死。

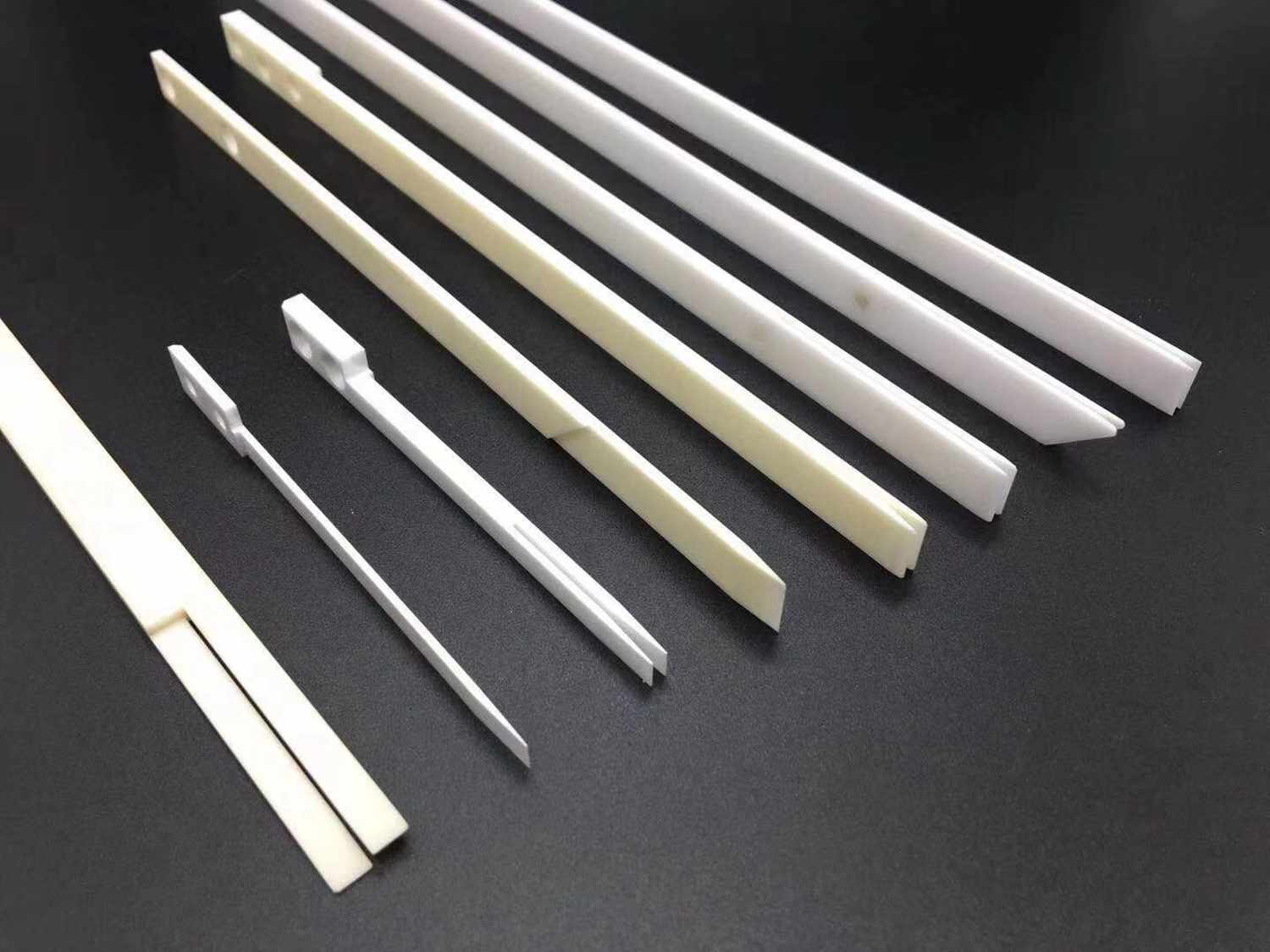
主体部分通常采用强度高、轻质的材料,如铝合金或碳纤维复合材料,以确保在保证结构强度的同时减轻自身重量,减少运动惯性,提高操作的灵活性和响应速度。吸臂的形状和尺寸经过精心设计,以适应不同尺寸晶圆的搬运需求。一般具有多个关节和自由度,能够实现多角度的灵活运动,类似于人类手臂的关节活动。例如,常见的多关节机械吸臂可以在三维空间内进行旋转、伸展、弯曲等动作,确保晶圆能够准确地从一个位置移动到另一个位置,无论是在光刻机、刻蚀机等设备之间的转移,还是在晶圆存储盒与加工设备之间的传送,都能精确无误。普遍认为机械臂是实现智能制造的很好的载体,可以实现五轴数控无法实现的大操作空间与灵活性。韶关晶圆运送机械吸臂上门服务
手臂。起着连接和承受外力的作用。佛山新款晶圆运送机械吸臂哪个牌子好
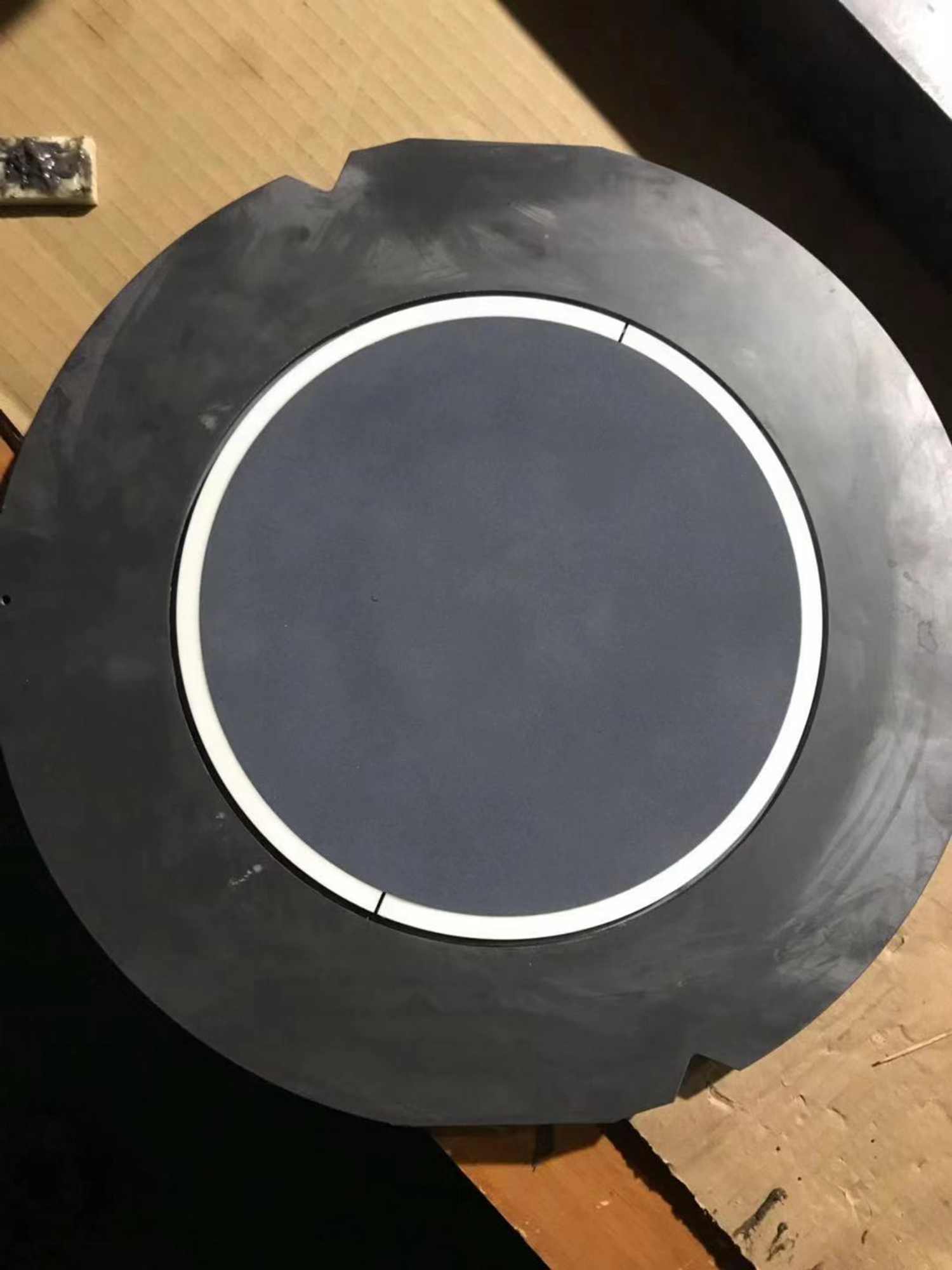
有用于输送半导体晶圆的机械手。具体地,该机械手将半导体晶圆插入到处理室(process chamber),或者将半导体晶圆从处理室中取出。传送室(transfer chamber)连结于处理室。机械手配置在该传送室内。利用机械手使半导体晶圆在传送室与处理室之间移动。传送室相当于小的无尘室。传送室防止灰尘等杂质附着于半导体晶圆。在传送室内保持空气(或者气体)清洁。另外,传送室内有时被保持为真空。要求使在传送室内工作的机械手不产生杂质的方法。佛山新款晶圆运送机械吸臂哪个牌子好
“氧化铝陶瓷|氧化锆陶瓷|碳化硅陶瓷|陶瓷机械手”深圳市德澳美精密制造有限公司,公司位于:深圳市龙华区龙华街道清湖社区清湖安之龙工业园B栋201,多年来,德澳美坚持为客户提供好的服务。欢迎广大新老客户来电,来函,亲临指导,洽谈业务。德澳美期待成为您的长期合作伙伴!
与晶圆运送机械吸臂相关的文章

珠海新款晶圆运送机械吸臂什么价格
- 河源晶圆运送机械吸臂代理价钱 2026-01-16
- 新款晶圆运送机械吸臂经销批发 2026-01-16
- 广东本地晶圆运送机械吸臂批发零售价 2026-01-15
- 汕尾进口晶圆运送机械吸臂公司 2026-01-11
- 广州官方晶圆运送机械吸臂厂商 2026-01-11
- 汕头正规晶圆运送机械吸臂生产厂家 2026-01-10
- 佛山原装晶圆运送机械吸臂推广 2026-01-05
- 广州进口晶圆运送机械吸臂哪里好 2026-01-05
- 韶关官方晶圆运送机械吸臂哪个牌子好 2026-01-03
- 广州进口晶圆运送机械吸臂参考价 2026-01-01
- 进口晶圆运送机械吸臂价格信息 2025-12-31
- 广州进口晶圆运送机械吸臂推广 2025-12-30
与晶圆运送机械吸臂相关的产品


与晶圆运送机械吸臂相关的新闻
-
广东进口晶圆运送机械吸臂维修电话 2025-12-25 00:10:57可选地,所述托板包括: 主板; 排列成八字形的***支板和第二支板,在所述主板的同一侧与所述主板固定连接; 所述主板靠近所述***支板和第二支板的一端、所述***支板远离所述主板的一端、所述第二支板远离所述主板的一端均设置有所述绒毛垫。 可选地,所述表面为平面。 另...
-
东莞原装晶圆运送机械吸臂工厂 2025-12-25 01:00:50一种晶圆传输装置及其真空吸附机械手,该真空吸附机械手包括:手臂;固定在所述手臂上的吸附绝缘凸台;设置在所述手臂和吸附绝缘凸台内的真空气道;所述吸附绝缘凸台用于吸附待传送晶圆的背面,所述吸附绝缘凸台的硬度小于所述待传送晶圆的背面的硬度。由于吸附绝缘凸台的硬度小于待传送晶圆的背面的硬度,故利用真空吸附机...
-
汕尾新款晶圆运送机械吸臂批发 2025-12-24 00:10:42本发明针对现有技术中的不足,提供了一种晶圆搬运机械手,本发明的机械手在传送过程中晶片中心始终保证直线运动,且角度不会发生改变。从而提高机械手整体刚度和承重能力,同时提高了重复定位精度。本发明结构合理性能稳定,维护方便,多功能集一身,可满足多种工艺设备要求,适用于各种半导体设备。 ...
-
湛江进口晶圆运送机械吸臂新报价 2025-12-23 02:00:33进行光刻: 将设计好的电路掩模,置于光刻机的紫外射线下,然后再在它的下面放置Wafer,这一刻,Wafer上被光刻部分的光刻胶被融化掉,刻上了电路图。然后将光刻胶去除,光刻胶上的图案要与掩模上的图案一致,然后进行再次光刻。一般来说一个晶圆的电路要经过多次光刻。而随着技术革新,极紫光刻出现了...
与晶圆运送机械吸臂相关的问题
新闻资讯
产品推荐
-

韶关原装精密结构陶瓷维修电话
2026-01-13 -

东莞进口精密结构陶瓷设计
2026-01-13 -

深圳微孔陶瓷真空吸盘维修电话
2026-01-13 -

广州新款微孔陶瓷真空吸盘工厂
2026-01-12 -

广东进口微孔陶瓷真空吸盘价格信息
2026-01-12 -

珠海原装精密结构陶瓷推广
2026-01-12 -

无锡氮化硅结构陶瓷
2026-01-11 -
汕尾进口晶圆运送机械吸臂公司
2026-01-11 -
广州官方晶圆运送机械吸臂厂商
2026-01-11