 手机号:
手机号:



数字化档案平台库房建设
- 品牌
- 方仓智能
- 展会周期
- 一年两届
- 展会类型
- 国内展
立方仓无人智慧档案馆项目,是仓储管理领域的一次质的飞跃,它深度融合了先进的机器人技术与智能化管理系统,彻底重塑了传统仓储作业模式。该项目中的智能机器人展现出非凡的灵活性,能够自如穿梭于各库区之间,实现跨区域的协同作业,极大地提升了整体运营效率与即时响应能力。在存储容量上,立方仓以其高效的性能独占鳌头,相较于传统密集架存储方式,它不仅实现了更大的存储容量,还显著提高了空间利用率,以高密度存储策略,在有限空间内高效承载并管理海量档案资源,完美契合了现代仓储对于高效集约、空间优化的追求。更令人瞩目的是,立方仓系统大幅缩短了档案出库周期,为用户提供了前所未有的快速查档服务体验,让档案存取变得前所未有的便捷高效。此外,该项目还致力于智能化管理的深化与用户体验的升级。其内置的自动优化机制,能够智能规划档案的存放布局,确保高频访问档案触手可及,进一步优化了取阅流程。同时,项目团队高度重视信息安全与系统稳定性,构建了多重防护体系,保障数据接口的安全交互及任务的稳健执行,为用户打造了一个既智能又安心的仓储管理新生态。立方仓智慧档案馆,能够更安全更高效更智能地管理档案。数字化档案平台库房建设
档案馆
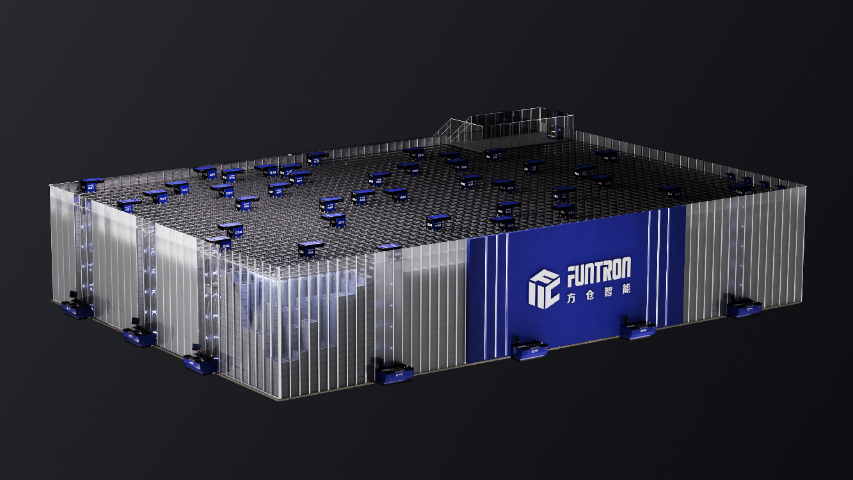
无巷道高密度货架⸺方仓网路方仓网路作为货架和机器人的行驶轨道,采用了特殊的工艺材质更加丝滑耐久。网路顶端是乐宝机器人的行驶轨道,双轨设计使得机器人在任何方向都能近距离无停滞并肩同行或错车,始终运行在更优存取路径上。网路标准化的结构组件设计,搭建不受场地,层高,立柱限制。易于组装,易于连接,施工成本低,周期短。立方仓网路可以以多楼层互通的存储方式为您降低土地成本,实现16m高度的跨层互联,很大限度地利用您的仓库空间,降低土地和管理成本。数字化档案平台发展方向智慧档案馆采用前沿高密度无人立方仓智能仓储方案,彻底告别繁琐盘库,存储量倍增,智能融合数字孪生技术。
立方仓无人智慧档案馆项目,凭借其前沿的机器人技术和匠心独运的布局规划,树立了仓储管理的新风向标。在此项目中,机器人能够灵活穿梭于各库区,实现多车协同作业的无缝对接,极大地增强了整体运作的顺畅度与响应灵敏度。立方仓在空间利用上展现非凡实力,其高密度存储模式极大提升了空间利用率,有效解决了传统仓储面临的空间限制难题。更值得一提的是,该系统将档案出库时间从原先的15分钟大幅缩减至30秒,为用户带来前所未有的高效便捷体验。此外,立方仓系统融入了先进智能化理念,能够智能调整档案存储位置,使得常用档案触手可及。在安全性层面,系统采取了物理隔离与多重防护并举的策略,确保了数据接口的接入安全与任务执行的安全可控,为用户构建了一个安全稳固的仓储管理环境。这一系列创新实践不仅优化了作业流程、升级了服务品质,更为仓储管理的未来发展描绘了一幅清晰的蓝图。
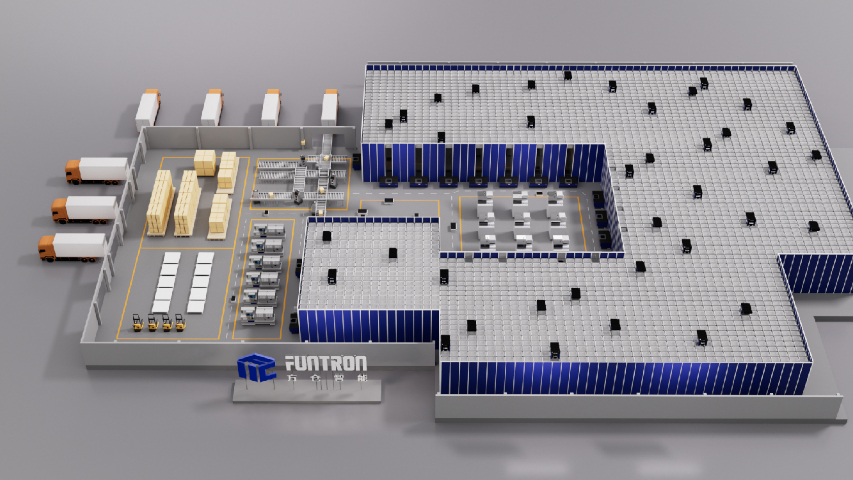
方仓智能的智慧无人档案库房解决方案,以创新技术为轴心,为各行各业库房升级提供了前所未有的方案。通过高密度存储设计与优化布局,该方案在有限空间内实现了存储容量翻倍,有效缓解了存储空间不足的难题。全自动存取系统融合先进机器人技术与智能调度算法,不仅确保了档案的精确拣选、安全管理,更将档案出库时间高效缩短,极大提升了工作效率。无人化运营模式不仅减少了人为错误与风险,还增强了安全性,为档案管理筑起坚实防线。
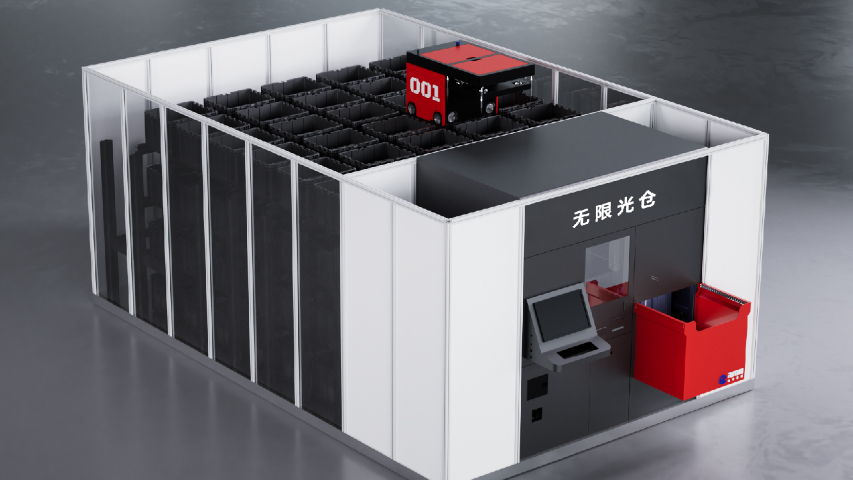
方仓智能档案库,宝箱档案RFID识别,系统规划货位,乐宝机器人精确高效存取,智拣台速达,档案存取更便捷。
传统的档案存储方法往往无法充分利用垂直空间,加之通道设置占用了过多空间,造成了空间资源的明显浪费。随着档案数量的持续增长,档案馆及基层档案室正面临存储空间紧张的严峻挑战,急需扩建新的库房。然而,新馆的建设不仅投入巨大,而且周期较长,在财政资金相对紧张的背景下,档案部门亟需探索新技术应用以应对这一困境。经过调研发现,上海市公安局、上海市高级人民法院、闵行区人民法院以及上海市社会保障事业管理中心等单位,面对日益增长的档案存储需求,采用了前沿的立方仓智慧档案库房管理技术,成功建设了高存储密度的全自动无人档案库房,成为了了区域性的档案存储风向标。这些项目通过科技赋能,不仅大幅提升了档案的调取、盘点和管理效率,有效解决了档案存储难题,还促进了行业间的交流与合作,推动了档案资源的开发利用,赢得了领导们的高度赞誉。立方仓智慧档案馆,存储容量扩增高达传统密集架的2倍,智能管理省却盘库烦恼,人库分离确保无忧。数字档案柜规划设计
智慧库房箱式存储,档案批量处理高效,转运灵活省空间!数字化档案平台库房建设
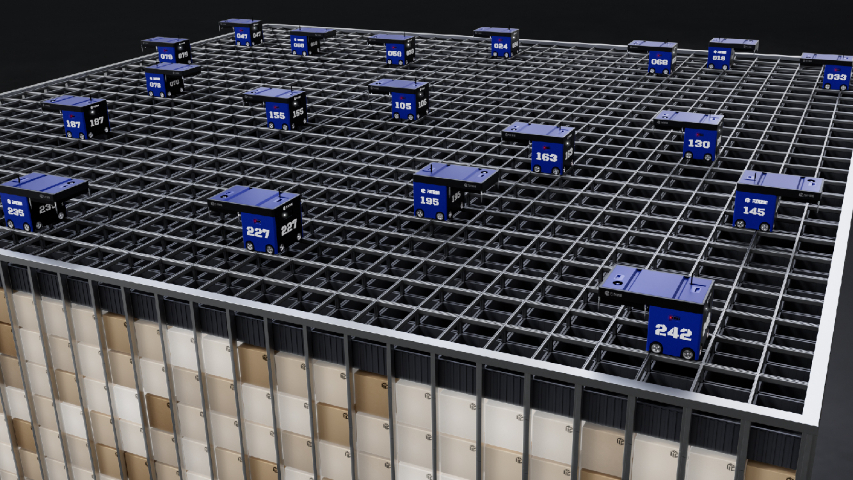
方仓智能存储系统采用了多路径网格棋盘式布局,仓库内部如同纵横交错的棋盘,机器人可以在多条路径上自由行驶。这种设计很大程度上增加了机器人的行驶路线,避免了拥堵现象。机器人有更多的选择来规划致极优先路线,减少运输时间;多个机器人可以在不同路径上并行作业,提升整体效率;系统还可以根据实时情况灵活调整机器人的路径规划,进一步优化效率。这种布局使得机器人将货物搬运到出口的速度呈几何倍数增长,显著提高了系统的吞吐量上限。数字化档案平台库房建设
-
自动化档案平台发展方向
打造智慧法院无人库房示范产品。示范效应:通过最高人民法院的成功应用,向全国各级法院展示智慧无人库房的...
【详情】档案平台解决方案供应商立方仓具有高度灵活性,分拣台可以在仓库的任意位置设置,设计布局时不受固定区域限制。根据业务需求和空间...
【详情】 -
智慧高密度档案馆功能
方仓智能无人智慧档案馆项目旨在通过智能化技术提升档案管理的效率与安全性。项目建设包括多个关键环节。首...
【详情】档案库房解决方案供应商在仓储管理智能化的进程中,立方仓项目凭借其创新的机器人技术和多库区协作模式,成为仓储行业的新风尚,成...
【详情】 -
自动化档案平台密集架厂家
为什么选择立方仓?致极空间利用:采用高密度垂直堆叠,较传统存储方案提升4倍空间,无需穿梭巷道,空间利...
【详情】信息化档案库房一站式信息化服务方仓智能立方仓智能仓储项目中,乐宝机器人正以其前所未有的便捷与高效,为档案管理领域带来一场深刻的智能...
【详情】 -
AI人工智能档案平台一体化建设
立方仓无人智慧库房项目凭借其先进的机器人技术和独特的布局设计,成为仓储管理新的风向标。在该项目中,机...
【详情】档案平台一体化建设方案方仓智能存储系统采用了多路径网格棋盘式布局,仓库内部呈现出纵横交错的棋盘格局,使得机器人能够在多条路...
【详情】 -
数字化档案馆一体化建设方案
高密度无人档案智慧库房融合了高科技技术与智能算法管理系统,将档案存储与管理推向新高度。该系统通过智能...
【详情】 -
AI人工智能档案平台十防建设
智能立方仓智慧档案库房的建设依托于先进的机器人技术和集成控制系统,实现了库房运营的高度智能化和自动化...
【详情】福建档案库房密集架厂家立方仓采用魔方式的构建模式,确保在没有系统授权的情况下,工作人员无法接触到档案,从而有效保障档案存储...
【详情】



-
 柔性智慧档案库房库房建设2024-12-24查看详情
柔性智慧档案库房库房建设2024-12-24查看详情 -
 RFID档案平台规划建设2024-12-23查看详情
RFID档案平台规划建设2024-12-23查看详情 -
-

企业:上海方仓智能科技有限公司
联系人:金翔
手机:18621709847
电话:21-37652195
400电话:4000039152
地址:上海市青浦区上海市松江区新桥镇千帆路288弄6号601室-33
- AI人工智能档案平台十防建设 12-24
- 福建档案库房密集架厂家 12-24
- 柔性智慧档案库房库房建设 12-24
- RFID档案平台规划建设 12-23
- 数字档案平台密集架 12-23
- 档案库房升级改造 12-23
- 智慧高密度档案柜库房设计 12-23
- 自动化档案平台 12-23
- 北京档案柜密集架厂家 12-23
- RFID档案馆库房设计 12-23
