- 品牌
- 通电嘉
- 型号
- 齐全
- 表面工艺
- 喷锡板,防氧化板,沉金板,上松香板,全板电金板,插头镀金板
- 基材类型
- 刚挠结合线路板,刚性线路板,挠性线路板
- 基材材质
- 有机树脂类覆铜板,金属基覆铜板,陶瓷基覆铜板,多层板用材料,特殊基板,屏蔽版
机械臂驱动电路需要能够提供精确的控制信号。刮鱼鳞机的工作需要机械臂能够在不同的位置和角度进行精确的运动。驱动电路需要能够根据运动控制算法的指令,提供准确的电压和电流给机械臂的各个驱动器,以实现对机械臂的精确控制。同时,驱动电路还需要具备良好的抗干扰能力,以避免外部干扰对机械臂运动的影响。机械臂驱动电路还需要与其他部件进行良好的协同工作。刮鱼鳞机的PCBA方案设计中,除了机械臂驱动电路外,还包括传感器、控制器等多个部件。驱动电路需要与这些部件进行良好的协同工作,以实现整个刮鱼鳞机系统的稳定运行。电疗按摩仪PCBA方案设计开发需考虑频率控制和按摩程序设计。东莞自动晒衣机电源板PCBA方案设计开发

在报警器PCBA方案设计开发中,兼顾信号解码和报警响应速度是一个需要平衡的问题。信号解码的准确性和报警响应速度之间存在一定的矛盾关系,需要在设计过程中找到合适的平衡点。一方面,信号解码的准确性是报警器PCBA方案设计中的基本要求。准确解码各种传感器信号可以确保报警器能够及时发出准确的警报,从而提供有效的安全保障。因此,在设计过程中,需要注重信号解码算法的优化和硬件设计的准确性,以确保信号解码的准确性。另一方面,报警响应速度也是报警器PCBA方案设计中的重要指标。在紧急情况下,报警器需要能够迅速响应并发出警报,以便人们能够及时采取行动。因此,在设计过程中,需要注重硬件设计和软件算法的优化,以提高报警器的响应速度。花都拔毛神器PCBA方案设计开发PCBA方案设计过程中,应充分考虑电路板的尺寸和结构。

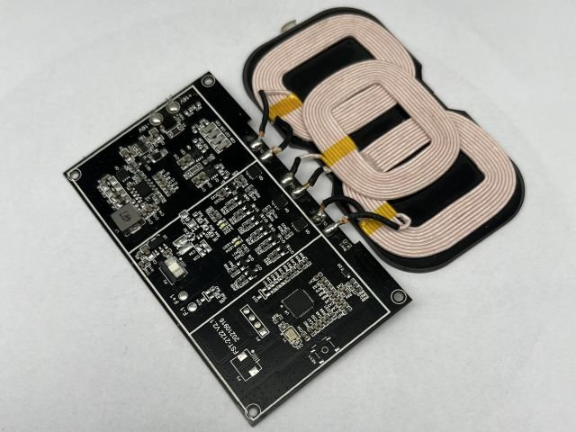
充电器功率转换电路需要考虑到充电设备的不同需求。不同的设备可能具有不同的充电电压和电流要求,因此需要设计可调节输出电压和电流的功率转换电路。这样可以适应不同设备的充电需求,提供定制化的充电解决方案。此外,充电器功率转换电路还需要考虑到安全性和稳定性等因素。充电器在工作过程中应具备过流保护、过压保护、短路保护等功能,以确保充电过程的安全性。同时,充电器的输出电压和电流应具备稳定性,以避免对充电设备造成损害。在无线充电PCBA方案设计开发过程中,电磁感应电路和充电器功率转换电路是密切相关的两个方面,它们需要进行协同设计,以实现整体方案的优化。
电路原理图设计对于PCBA的调试和故障排除具有重要意义。当PCBA出现故障时,工程师可以通过查看电路原理图来定位问题所在,快速找到故障点并进行修复。电路原理图可以作为故障排查的参考依据,帮助工程师准确分析和解决问题,提高调试效率和成功率。此外,电路原理图设计还有助于保证PCBA的可维护性和可扩展性。在设计过程中,工程师可以合理地划分电路模块,将复杂的电路结构分解为简单的子模块,使得整个电路更易于维护和升级。通过电路原理图的设计,工程师可以清晰地了解各个模块之间的关系和接口,为后续的维护和扩展提供了便利。PCBA方案设计要考虑产品的可靠性和寿命。
在刮鱼鳞机PCBA方案设计开发中,运动控制算法和机械臂驱动电路的协同工作对于优化刮鱼鳞机的性能至关重要。通过优化算法和驱动电路的协同工作,可以提高刮鱼鳞机的工作效率、减少能耗,并且提升刮鱼鳞的质量和稳定性。首先,通过优化运动控制算法,可以实现刮鱼鳞机的高效工作。算法可以根据不同的鱼身形状和大小,自动调整刮鱼鳞的速度和力度,以实现更好的去鳞效果。此外,算法还可以通过智能化的控制策略,减少机械臂的不必要运动,从而提高工作效率和节约能源。其次,通过优化机械臂驱动电路,可以提升刮鱼鳞机的稳定性和精确性。驱动电路可以采用高精度的电流和位置反馈控制技术,实现对机械臂的精确控制。在PCBA方案设计中,避免信号干扰是关键之一。黄埔科学城颈部电疗按摩仪PCBA方案设计开发
PCB板设计要考虑信号传输、供电和散热等因素。东莞自动晒衣机电源板PCBA方案设计开发
软件开发与PCBA方案设计之间的协同工作流程对于确保项目的成功和高效进行至关重要。在软件开发与PCBA方案设计的协同工作流程中,需要进行密切的合作和沟通,确保双方的需求和目标能够得到充分理解和满足。首先,软件开发人员和PCBA方案设计人员需要进行初步的需求分析和定义。双方需要明确产品的功能需求、性能要求和交互设计等方面的要求,以便在后续的工作中进行相应的设计和开发。其次,软件开发人员和PCBA方案设计人员需要进行紧密的技术协商和方案评审。双方需要就PCBA方案设计中的硬件布局、电路连接和软件开发中的架构设计、接口定义等方面进行深入的讨论和决策,确保双方的设计和开发工作能够相互匹配和协调。东莞自动晒衣机电源板PCBA方案设计开发

- 惠州PCBA方案设计开发工艺 2024-09-12
- 报警器PCBA方案设计开发原理 2024-09-11
- 江西无线充电PCBA方案设计开发 2024-09-10
- 山西4G报警器PCBA方案设计开发 2024-09-08
- 顺德服务好PCBA方案设计开发 2024-09-08
- 自动晒衣机电源板PCBA方案设计开发供应 2024-09-07
- 佛山解冻器PCBA方案设计开发 2024-09-06
- 高性价比PCBA方案设计开发一站式厂家 2024-09-04