- 品牌
- 桐尔
- 型号
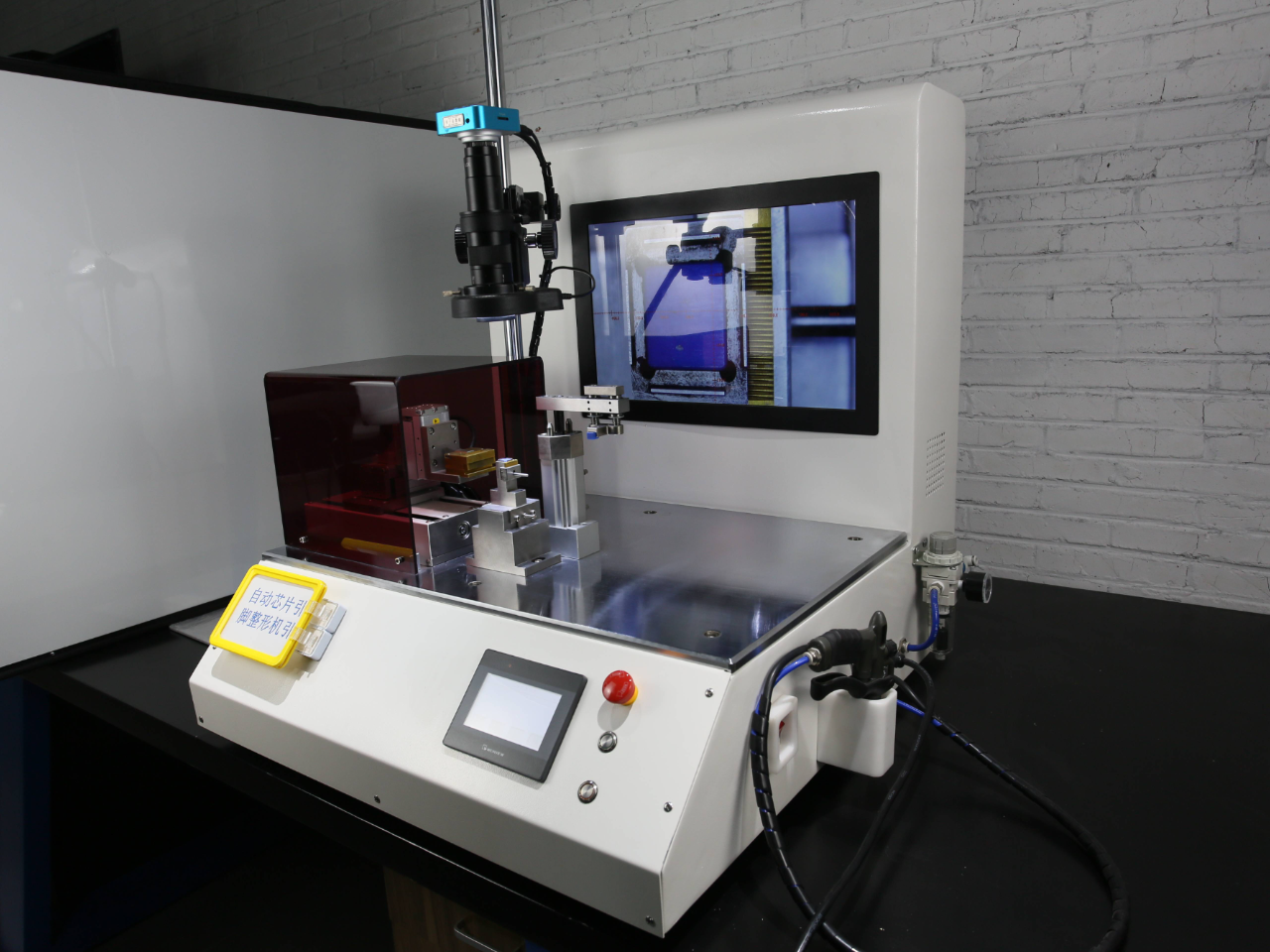
- TR-50S 芯片引脚整形机
术语“连接”在用于指示电路部件之间的直接电连接,电路部件除了导体之外没有中间部件,而术语“耦合”用于指示可以是电路部件之间的直接的电连接或者经由一个或多个中间部件的电连接。在以下描述中,当提及限定***位置的术语,例如术语“顶部”、“底部”、“左”、“右”等,或限定相对位置的术语,例如术语“上方”,“下方”,“以上”等,或限定方向的术语,例如术语“水平”,“竖直”等时,除非以其他方式指出,它是指附图的取向。本文使用的术语“约”、“基本上”和“大约”指的是所讨论的值的±10%,推荐±5%的公差。图1a-图2c示出了形成电子芯片的方法的实施例的六个连续步骤s1、s2、s3、s4、s5和s6。每个步骤由在该步骤之后获得的结构的部分简化横截面视图示出。通过该方法获得的芯片包括晶体管、存储器单元和电容部件。晶体管通常包括栅极,该栅极由栅极绝缘体与位于漏极区域和源极区域之间的沟道区域隔开。存储器单元通常包括晶体管,该晶体管具有顶部有控制栅极的浮置栅极。在图1a的步骤s1中,提供推荐由硅制成的半导体衬底102。沟槽104从衬底102的前表面(或上表面)形成在衬底中。沟槽104所具有的深度例如大于100nm,推荐大于300nm。在本实施例中。在使用半自动芯片引脚整形机时,如何保证生产过程中的卫生和清洁度?南京自动化芯片引脚整形机多少钱

半自动芯片引脚整形机在生产线上可以集成和配合其他设备,以提高生产效率和自动化程度。以下是一些集成和配合的方式:与芯片装载设备配合:将芯片装载设备与半自动芯片引脚整形机集成,实现自动化芯片装载和引脚整形。芯片装载设备可以将芯片放置在半自动芯片引脚整形机的装载位置,并由机器自动完成芯片引脚整形和释放。与质量检测设备配合:将质量检测设备与半自动芯片引脚整形机集成,实现对芯片引脚整形质量的自动检测和筛选。质量检测设备可以检测芯片引脚的形状、尺寸和位置等参数,并将不合格的芯片筛选出来,以确保生产线上流出的芯片质量符合要求。与芯片封装设备配合:将芯片封装设备与半自动芯片引脚整形机集成,实现自动化芯片封装和测试。芯片封装设备可以将整形后的芯片进行封装,并进行测试以确认其功能和性能。与物流设备配合:将物流设备与半自动芯片引脚整形机集成,实现自动化芯片运输和转移。物流设备可以将芯片从半自动芯片引脚整形机转移到其他设备或产线中,以实现生产线的自动化运转。总之,半自动芯片引脚整形机可以与其他设备进行集成和配合,以实现自动化生产和提高生产效率。具体的集成方式取决于生产线的需求和设备的性能。 上海智能芯片引脚整形机厂家批发价电子显微镜60倍实时放大,操作员可清晰观察引脚根部整形效果,降低视觉疲劳。

凸起213沿柱体的轴向方向延伸。壳体210的顶面设置有第二凹槽212,在一种推荐的实施方式中,***凹槽211和第二凹槽212的开口形状为矩形,但在其它的实施方式中,也可以将开口设置为其它形状。请参见图3,是本发明实施例提供的一种弹片320的结构示意图,弹片320包括触点部321和转接部322。在一种推荐的实施方式中,触点部321的一侧包括曲面,例如可设置为圆弧形。转接部322的形状应与壳体的第二凹槽的开口形状相匹配,以确保安装精度和稳定性。为更清楚的阐述芯片引脚夹具的内部结构,请参见图4,是本发明实施例提供的一种芯片引脚夹具400的剖面示意图。壳体410的***凹槽411可分为三个部分,分别为上部、中部和下部,***凹槽411的中部的深度大于上部深度及下部的深度。壳体410上还设置有通孔(未标号),弹片420紧靠通孔内壁安装,弹片420延伸至***凹槽411中部形成触点部421,弹片420还延伸至第二凹槽(未标号)形成转接部422,转接部422暴露于壳体410外。在其它一些实施方式中,转接部422可以*覆盖第二凹槽的部分底面。凸起413与***凹槽上侧面之间具有***间隙414,凸起413与***凹槽下部的底面之间具有第二间隙415,***间隙414和第二间隙415均不小于待测芯片的引脚厚度。
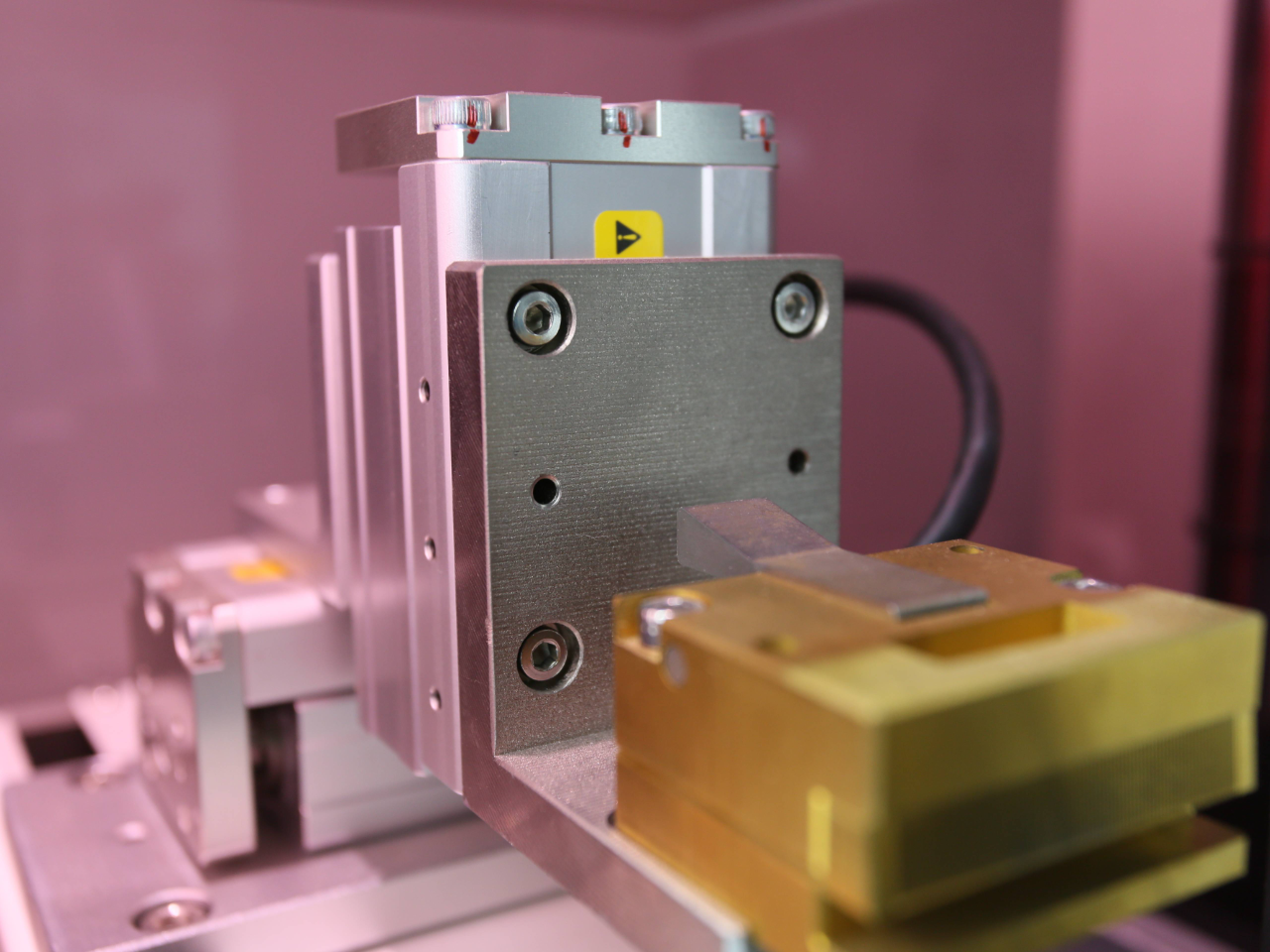
TR-50S 芯片引脚整形机的机械手臂通常采用高精度的伺服控制系统来实现对芯片引脚的高精度整形。机械手臂通过与高精度X/Y/Z轴驱动系统的配合,可以实现精确定位和运动控制。X/Y/Z轴驱动系统通常采用伺服电机和精密滚珠丝杠等高精度运动部件组成,能够实现微米级别的运动精度。在整形过程中,机械手臂首先将芯片放置在定位夹具上,然后根据预设的整形程序,通过高精度X/Y/Z轴驱动系统实现芯片引脚的精确定位和调整。伺服控制系统可以实时监测和调整运动位置和速度,以确保整形过程的精确性和稳定性。此外,机械手臂还配备了高精度的传感器和反馈系统,可以实时检测芯片引脚的形状和位置信息,并根据反馈信息调整运动轨迹和整形程序,以确保良好的整形效果。总之,半自动芯片引脚整形机的机械手臂通过与高精度X/Y/Z轴驱动系统的配合,可以实现高精度的运动控制和整形过程,确保每个芯片引脚都能够得到良好的修复效果。上海桐尔推出的芯片引脚整形机,以高精度技术确保引脚成型的准确性。

VSR-8真空回流焊炉 ,产品特点:快速准确的温度曲线适合低温焊料的甲酸去氧化能力准确自动的工艺气体流量控制加热板和工件夹具的一体化设计易于操作的图形化界面技术参数:加热板尺寸210mmx230mmx5mm工作区域高度100mm加热系统高温可达450℃温度均匀性优于2%(超过85%工作区域)升温/降温速度升温3℃/s、降温0.85℃/s(平均降温速度)工艺气路质量流量计(MFC)控制,并配有电磁阀腔室真空5mbar或0.05mbar(取决于真空泵的选择)控制系统PLC或Windows计算机控制可选功能甲酸气路、正压能力、冷水机、辅助热电偶等自动芯片引脚整形机的精度和稳定性如何保证?国内芯片引脚整形机设计
在使用半自动芯片引脚整形机时,如何实现批量处理和提高效率?南京自动化芯片引脚整形机多少钱
通过此生产工艺实现驱动绕丝的自动化生产。技术实现要素:针对现有技术的不足,本发明公开了一种驱动电源软针引脚绕丝工艺。本发明所采用的技术方案如下:一种驱动电源软针引脚绕丝工艺,包括以下步骤:步骤s1:引脚打斜;引脚的初始状态为垂直状态,垂直的引脚向外打开一定的角度;步骤s2:绕丝;按引脚打斜方向进入后绕丝;步骤s3:剪断;修剪引脚的长度;步骤s4:调整;将引脚调整位置。其进一步的技术特征为:在步骤s1中,引脚焊接在pcb板上;分丝爪将引脚向分丝打开的方向张开,将引脚打开,引脚打开后,分丝爪撤回。其进一步的技术特征为:在步骤s2中,绕丝棒按引脚的打斜方向进入后绕丝,将导线旋转缠绕在引脚上,两侧的引脚绕丝完成后,绕丝棒撤回。其进一步的技术特征为:在步骤s3中,剪刀修剪绕丝后的引脚的长度。其进一步的技术特征为:在步骤s4中,夹丝爪调整引脚的位置,引脚调整后,引脚和pcb板之间的夹角≤90°。本发明的有益效果如下:本发明为了完成电源驱动的自动绕丝工作重新设计了一种工艺方式:通过分丝爪将原本垂直的引脚向外打开一定的角度,此时引脚就可以露出驱动电源件的外轮廓,然后绕丝棒斜向进入对引脚进行绕丝工作,完成后。南京自动化芯片引脚整形机多少钱
在分辨引脚排列时,应首先了解芯片的具体型号和封装方式,然后结合上述方法进行判断。同时,务必确保在连接引脚时遵循正确的顺序和方式,以避免损坏芯片或影响电路的正常工作。上海桐尔科技有限公司将继续致力于为电子行业提供**、可靠的解决方案,助力工程师在芯片引脚识别和电路设计中取得更大的成功。上海桐尔科技多年来一直致力于微组装产线等方面的技术服务,主营:TR-50S芯片引脚整形机,自动芯片引脚成型机,全自动搪锡机,超景深数字显微镜,AI显微镜,半钢电缆折弯成型机,焊接机器人,AGV智能机器人,真空汽相回流焊等相关产品销售根据《广告法》和工商部门指示,新广告法规定所有页面不得出现***性用词与功能...
- 常规芯片引脚整形机性能 2026-07-06
- 南京通用芯片引脚整形机用途 2026-07-06
- 南京本地芯片引脚整形机一般多少钱 2026-07-03
- 江苏安装芯片引脚整形机销售 2026-07-01
- 南京台式芯片引脚整形机优势 2026-07-01
- 南京销售芯片引脚整形机应用范围 2026-06-30
- 上海工业芯片引脚整形机使用方法 2026-06-30
- 整套芯片引脚整形机私人定做 2026-06-30
- 南京国内芯片引脚整形机 2026-06-29
- 江苏什么是芯片引脚整形机报价 2026-06-29


- 江苏国产芯片引脚整形机处理方法 2026-06-23
- 江苏台式芯片引脚整形机价格查询 2026-06-23
- 多功能芯片引脚整形机诚信合作 2026-06-23
- 上海半自动芯片引脚整形机简介 2026-06-10
- 机械芯片引脚整形机参考价格 2026-06-10
- 江苏多功能芯片引脚整形机生产厂家 2026-06-10





- 海南加工超景深显微镜 07-08
- 苏州加工全自动半钢电缆成型系统诚信合作 07-08
- 朝阳区超景深显微镜服务 07-08
- 南京整套全自动半钢电缆成型系统供应商 07-07
- 闵行区工业全自动半钢电缆成型系统代理商 07-07
- 直销全自动半钢电缆成型系统处理方法 07-07
- 黑龙江小型超景深显微镜 07-07
- 南京机械芯片引脚整形机哪里有卖的 07-06
- 常规芯片引脚整形机性能 07-06
- 南京通用芯片引脚整形机用途 07-06