矿山井下作业领域已实现全流程数字化管控,其重要方案集成3D激光雷达扫描、3D ToF技术、SLAM同步定位与建图及AI安全分析技术,实现“井下采集-实时建模-隐患监测-准确管控”的闭环管理。井下作业人员携带轻量化3D激光雷达ToF扫描仪,适配无GPS、弱光线的复杂环境,沿巷道行走即可完成数据采集,借助ToF技术的抗干扰优势,5-10分钟可覆盖单条巷道,同步获取高精度点云与实景影像,还原巷道支护、管线走向等细节。系统自动生成井下三维数字孪生模型,通过AI分析点云数据,准确识别巷道变形、采空区隐患,支持多维度查看与方量准确计算,误差可控制在1%以内,形成完整数字化作业档案,提升井下作业效率与安全管控水平,降低人工勘查的安全风险。会展中心闸机:3D相机实时统计入场人数,检测异常聚集,保障展会有序进行。长沙机器3D相机导航
场景:工业园区、住宅小区园区,存在围栏、路灯、绿化植被、垃圾桶、行人和车辆等障碍物,夜间光照昏暗,白天光照充足,需24小时自主巡逻,避免碰撞行人和设施。技术说明:配备sparkbot 3D激光雷达与3D ToF相机,融合3D ToF与dToF数据,突破单一传感器在昼夜不同光照下的局限,实现远距离车辆、围栏的高精度探测与近距离植被、垃圾桶的广域覆盖。融合多源传感器数据,精确识别障碍物类别、地面材质及可通行区域,构建园区三维环境模型,优化系统延迟,应对车辆驶入、行人散步等动态场景,智能适应昼夜光照变化与地面起伏,保障机器人全天候稳定巡逻,提升园区安防效率。天津机械狗3D相机3D激光雷达可搭载于无人机,应用于边境线安防巡逻,解决传统人力巡逻地形复杂、风险高、覆盖不全的问题。

在机器人仓储库位管理场景使用过程中存在以下问题:单点激光雷达传送的库位信息不够准确,造成堆放事故部分仓库采用单点激光雷达进行库位检测,这种测距雷达一次只能发射一束激光到物体表面形成一个点,因此这样的测距方式有时会忽略纸箱与纸箱或托盘与托盘之间的缝隙,进而将当前库位识别为缺少货物或为空,同样易造成堆放事故。通过采用33D视觉相机技术,在则可以此种问题。该3D相机采用先进的ToF技术,具备高分辨率成像能力,适用于无人机测绘、工业检测、安防监控等多个领域。设备支持实时数据传输,可与各类控制系统无缝对接,有效提升作业效率,降低人工成本,为用户提供稳定可靠的三维感知解决方案。
场景:城市辅路、园区道路,存在机动车、非机动车、行人、井盖、路沿石等障碍物,光照变化大(强光、阴天、傍晚),地面有起伏、积水,需自主行驶配送,避免碰撞。技术说明:配备sparkbot 3D激光雷达与3D ToF相机,采用相机融合技术,结合3D ToF与dToF数据,实现远距离机动车、行人的高精度探测与近距离井盖、路沿石的广域覆盖。融合多源传感器数据,精确识别障碍物类别、地面状况及可通行区域,构建道路三维环境模型,深度优化系统延迟,应对车辆变道、行人横穿等动态场景,智能适应室外光照变化、地面起伏与积水,保障无人配送车全天候、多地形稳定行驶,安全完成配送任务。sparkbot的3D视觉传感器可提供三维空间数据,监控托盘、货架和货位的有效位置。

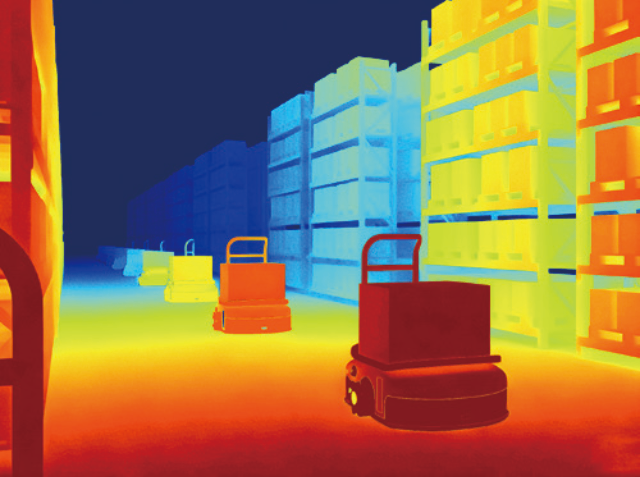
港口搬运机器人依托3D激光雷达,实现港口集装箱、货物的高效搬运。其360°全向感知,可识别港口集装箱、拖车、堆料、作业人员等障碍物,适应港口复杂动态环境。高达150万点/秒的点云速率,能快速构建港口作业区域3D地图,配合SLAM算法实现自主定位与路径规划,准确对接集装箱吊具。≤1cm的测距精度,确保集装箱搬运定位误差控制在毫米级,提升搬运效率与安全性。激光雷达具备抗粉尘、抗强光性能,可在港口露天、粉尘较多的环境中稳定运行,替代人工完成重型货物搬运,降低人员劳动强度。3D激光雷达安全监测方案,有效屏蔽门即将关闭的瞬间,激光雷达迅速检测危险信号及时阻止了屏蔽门的关。佛山机械狗3D相机导航
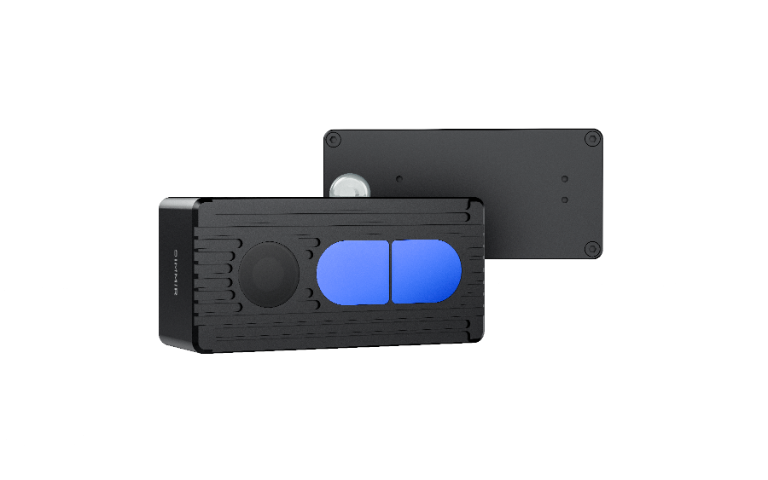
sparkbot的aura 灵光系列产品,采用i tof和d tof测量学原理设计,硬件3D 视觉。长沙机器3D相机导航
3D视觉技术在障碍物检测与避障中的应用还面临着一些挑战。例如,如何进一步提高图像处理的速度和准确性,以适应移动机器人高速运动的需求;如何优化算法以降低计算资源的消耗,提高系统的实时性和稳定性等。3D视觉技术在移动机器人障碍物检测与避障过程中具有不可替代的地位和作用。它不*可能够提升机器人的感知能力和智能化水平,还将为移动机器人领域的持续发展和创新提供有力的技术支持。随着技术的不断进步和应用场景的拓展,我们有理由期待3D视觉技术在未来移动机器人领域中的更较广泛应用和更深入发展。长沙机器3D相机导航
杭州星火博特科技有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在浙江省等地区的机器人视觉传感器中汇聚了大量的人脉以及市场口碑,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同杭州星火博特科技供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!