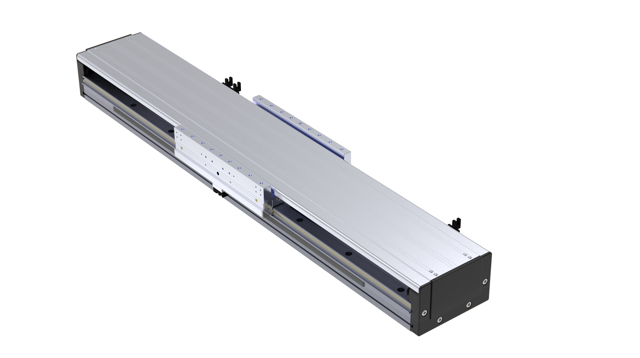
磁悬浮直线电机模组是集成磁悬浮技术与直线驱动功能的机电一体化单元。该装置通过电磁力同步实现无接触悬浮与直线运动,将动子与导轨间的物理接触彻底分离。基本构成:电磁驱动部分:包含永磁阵列与多相绕组悬浮控制系统:实时调节悬浮间隙的传感器与电磁组件导向机构:无接触磁导向或辅助机械限位防护与散热系统技术特性:悬浮间隙通常维持在0.1-2毫米范围运动过程无机械摩擦与磨损具备六自由度控制能力(X/Y/Z三轴移动与旋转)通过多变量控制算法保持运行稳定主要优势:零磨损带来长期运行稳定性无润滑需求,适应洁净环境高动态响应与定位精度多自由度运动集成于单一平台应用场景:该模组已应用于半导体光刻设备、精密测量仪器、生物医疗设备及特殊物料传输系统,为超精密制造与科研领域提供基础运动平台。其无接触特性特别适合真空、无菌等敏感环境。磁悬浮直线电机模组通过将复杂的悬浮控制与驱动技术封装为标准化单元,降低了系统集成难度,成为先进制造装备的重要基础部件。在高速往复运动中磁悬浮直驱直线电机模组表现远超传统机械模组。江苏高精度磁悬浮直驱直线电机模组
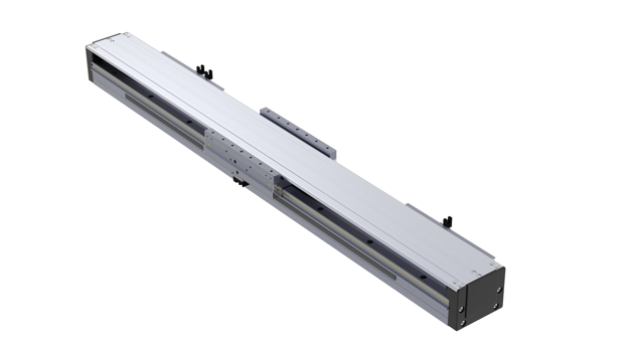
磁悬浮直线电机是一种将直线推进功能与悬浮支撑结合的电驱动装置。它通过电磁场作用,令可动部件稳定浮起于固定轨道上,并在悬浮状态下完成直线运动,两者之间无实体接触。工作原理:系统基于电磁感应原理,由多组线圈与永磁体相互作用,通过实时调整电流的大小与方向,同时产生可控的向前推力与向上悬浮力,使动子在运动中保持位置稳定。突出特点:无接触运行:运动件与固定件无摩擦磨损,适合长寿命与高洁净场合。运动性能高:可达到很高速度和加速度。结构简化:推进、悬浮与导向功能合一,减少机械部件。应用场合:微电子制造设备中晶圆平台的定位驱动。高速轨道交通运输系统。对无尘、无油污有严格要求的特殊环境。磁悬浮直线电机提供了一种无摩擦、高响应的运动解决方案,适用于传统机械传动难以实现的高需求工业与科技领域。闵行区服务到位磁悬浮直驱直线电机模组磁悬浮直驱直线电机模组的轨道表面需防止异物沾染与划伤。
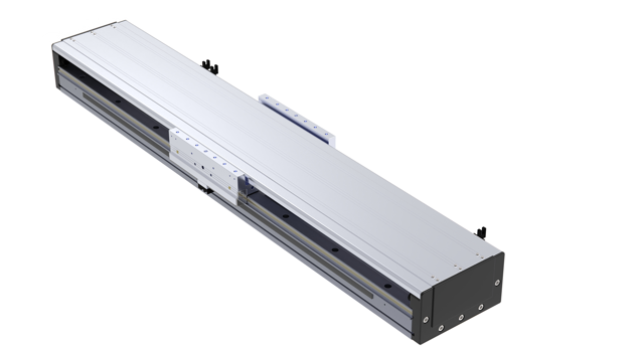
底层架构,构建全闭环精密控制。“磁悬浮直驱直线电机模组”的系统方案并非简单的电机替换,而是一套深度融合了高精度磁场设计、多自由度悬浮控制与智能运动算法的完整技术体系。方案底层采用模块化设计,集成了无铁芯直驱电机、高分辨率光学编码器、自适应磁浮轴承及一体化控制器,形成了全闭环位置、气隙与力控回路。这一架构确保模组在高速运动中仍能维持亚微米级的轨迹跟踪精度与稳定的动态刚度。因此,“磁悬浮直驱直线电机模组”的系统方案能够为高精度加工、显微操作与自动化测试提供稳定可靠的平台级解决方案。
磁悬浮直驱直线电机模组的长期稳定运行,离不开细致入微的日常清洁与检查。由于模组通常运行于高精度、高洁净度或存在粉尘的工业环境中,其线性导轨、定子与动子(电磁线圈与永磁体)表面的异物积累是主要威胁。每日应使用洁净的干燥无尘布或专门清洁工具,轻轻擦拭暴露的轨道和磁浮机构表面,必要时可使用高纯度异丙醇等非腐蚀性溶剂辅助清洁,但需确保完全挥发后再通电。同时,应目视检查所有可见部件有无明显的物理损伤,如刮痕、凹坑或紧固件松动。对于采用气浮或混合支撑的模组,还需检查气路接口是否牢固,过滤器中是否有积水或油污。日常检查是预防性维护的首要防线,能有效避免微小问题演变成重大故障,确保模组的基础精度和运行平顺性。监控磁悬浮直驱直线电机模组运行温度确保其在合理范围内。

在消费电子(如手机、手表)的精密装配、检测和包装线上,对速度和精度的要求日益提高。磁悬浮直驱模组开始应用于高速并联机器人(Delta)的直线驱动单元、高精度贴装平台以及飞拍检测系统中。其极快的加速能力和精密停位,可以大幅缩短生产节拍,提升效率。在柔性电子、半导体封装的复杂工序中,其多自由度集成能力允许一个平台拾放、对准、压合等多功能,减少工站数量,提高系统集成度和灵活性。虽然当前成本较高,但磁悬浮直驱直线电机技术本身即是超高速磁悬浮列车的主要驱动与悬浮技术。在更小尺度上,它可应用于未来工厂或仓储的智能物流系统,实现物料箱或载具在复杂轨道网络上的高速、静音、无摩擦传输,并能通过单独控制实现灵活的路由和分拣。在主题公园的动感平台和虚拟现实体验设备中,也能提供更迅猛、更真实的运动反馈。随着技术成熟和成本优化,其在更广阔运输和物流领域的应用潜力巨大。在液晶面板搬运系统中磁悬浮直驱直线电机模组确保了平稳快速传输。江苏高精度磁悬浮直驱直线电机模组
磁悬浮直驱直线电机模组凭借其高刚性可承受较大侧向力。江苏高精度磁悬浮直驱直线电机模组
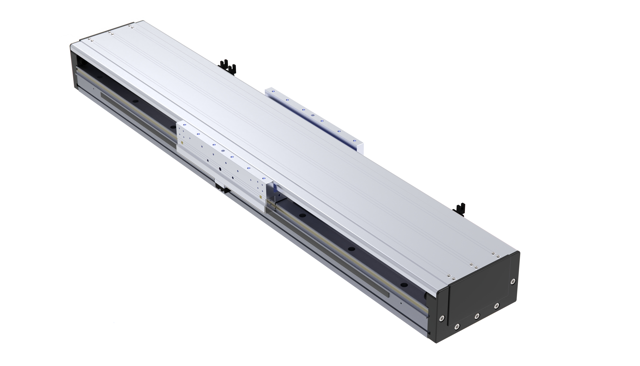
该模组是一个典型的多变量、强耦合、非线性复杂控制系统。五个自由度的磁悬浮控制与直线轴的位置/速度控制相互影响。例如,直线加速时会产生巨大的颠覆力矩,影响悬浮稳定性;而悬浮气隙的波动也可能干扰位置传感器的读数。因此,控制算法是主要技术壁垒。通常采用分层或解耦控制策略:底层是快速响应的电流环,控制各绕组或电磁铁的电流以精确产生所需力;中层是悬浮控制环(针对每个自由度),根据气隙传感器反馈,通过PID、状态反馈、鲁棒控制或智能控制算法计算所需的控制力;上层是运动轨迹规划与位置控制环。先进的控制器采用前馈补偿、扰动观测器和交叉解耦算法,以抑制各自由度间的耦合和外部扰动。江苏高精度磁悬浮直驱直线电机模组
苏州控为自动化科技有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在江苏省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来苏州控为自动化科技供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!