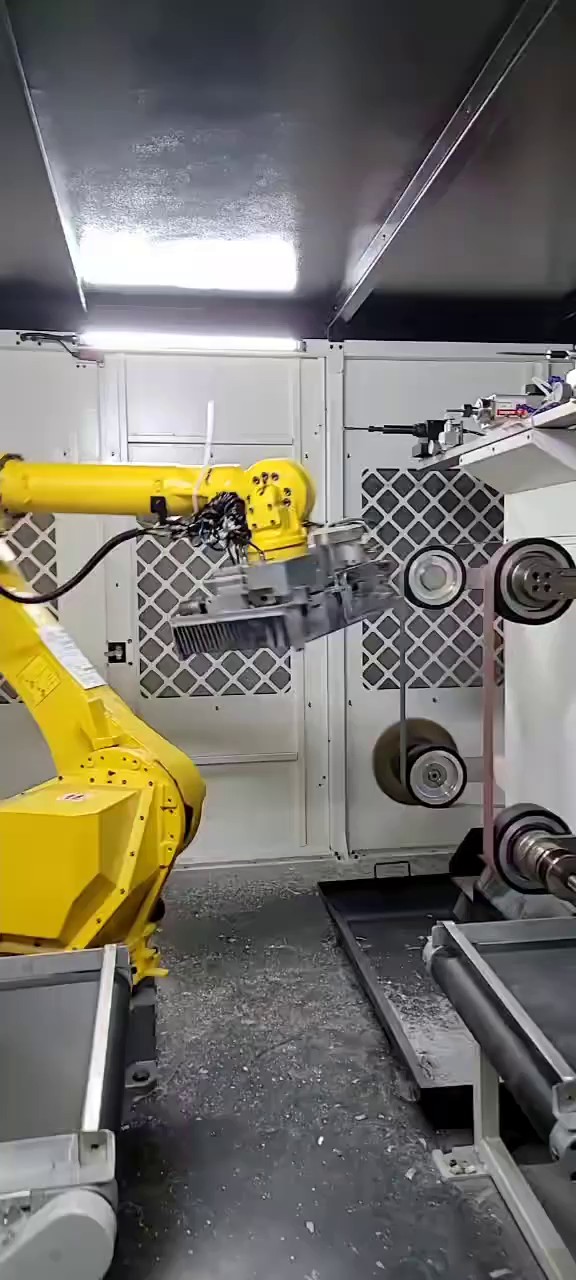
力(力矩)操控方法在打磨机器人的应用中起着至关重要的作用。当机器人执行如安装、抓放物体等任务时,除了需要精确的定位,还要求所施加的力或力矩必须适中。为了实现这一目标,就需要使用到(力矩)伺服方法。这种操控方法的原理与位置伺服操控原理基本相似,但其输入量和反馈量不是位置信号,而是力(力矩)信号。因此,这种控制体系中必须有相应的力(力矩)传感器。在某些情况下,还会使用到接近、滑动等传感功能,以实现自适应式操控。打磨机器人可以通过搭载传感器和摄像头,实时感知工件的形状和位置。无锡打磨机械手
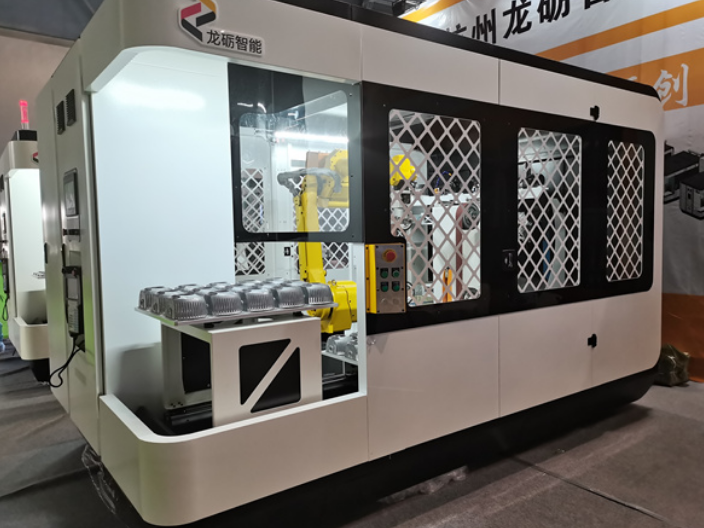
这种机器人能普遍应用于各种场景,包括工件的表面打磨、棱角去毛刺、焊缝打磨、内腔内孔去毛刺,以及孔口螺纹口加工等。它由示教盒、控制柜、机器人本体、压力传感器、磨头组件等多个部分组成,可以在计算机的控制下实现连续轨迹控制和点位控制。无论是卫浴五金行业、汽车零部件、工业零件,还是医疗器械、木材建材家具制造、民用产品等行业,都能见到它的身影。抛光打磨机器人的引入,不仅解决了卫浴制造行业面临的招工难题,还提高了生产效率和产品质量,为企业带来了实实在在的经济效益。随着技术的不断进步和应用领域的拓展,抛光打磨机器人在未来制造业中的地位将更加重要。温州自动化打磨设备机器人打磨技术在制造业中扮演着重要的角色。

在位置控制模式下,机器人会精确地按照预先设定的位置轨迹进行运动。然而,当机器人在运动过程中遇到障碍物并因此产生位置追踪误差时,它会试图通过增加作用力来追踪预设轨迹,这可能会导致机器人与障碍物之间产生巨大的内力。这种内力不仅可能损坏零件,还可能对机器人的结构造成损害。相比之下,力控制模式则更加注重机器人与障碍物之间的作用力控制。当机器人遇到障碍物时,力控制模式会智能地调整其预设位置轨迹,以消除由于障碍物产生的内力。这种调整确保了机器人与障碍物之间的作用力保持在安全范围内,从而避免了可能的损害。
直驱力控方式则是通过协作机器人各个关节采用直流电机驱动,电流与转矩成正比。通过精确控制电流的大小,机器人能够实现对力的精确控制。这种方式的主要优点在于防碰撞和拖曳示教功能,使得机器人在作业过程中更加安全可靠。基于力控技术的打磨抛光机器人为现代制造业带来了变革性的变革。通过选择合适的力控方式,机器人不仅能够高效地完成打磨任务,还能确保作业质量,为企业创造更大的价值。机器人在执行与环境产生力交互的任务,例如打磨和装配等,单纯依赖位置控制可能会导致过大的作用力,这可能会对零件或机器人本身造成伤害。为了确保在这些受限环境中的安全有效运动,机器人需要配合力控制来进行操作。打磨抛光机器人在制造业中扮演着关键的角色。

在众多机器人应用中,像搬运和焊接这样的任务,大多都可以通过点到点的走轨迹方式实现,这使得机器人在这些领域的实现变得相对容易。然而,抛光打磨却是一个完全不同的挑战。在抛光打磨过程中,打磨的轻重完全依赖于工人的手感,而且每个产品都不可能完全一致,这就要求机器人必须具备像人一样感知和适应打磨状况的能力,以实现柔性化的抛光打磨。为了实现机器人的柔性化抛光打磨,力控柔性抛光打磨工具是必不可少的。其中的柔性力控打磨系统可以根据工作需要对末端工具进行重力补偿,并精确输出平行于机械臂轴向的接触力。这个装置还能根据接触表面的轮廓特征进行自适应伸缩,从而解决了接触面敏感特征工艺与快速接触移动之间的自动化难题。打磨机器人不会因为疲劳而降低工作效率,也不会因为长时间的重复动作而出现错漏。嘉兴数控打磨抛光机
打磨机器人可以通过精确的程序控制完成复杂的打磨任务,进一步提高工作效率。无锡打磨机械手
力控技术的精度和反馈速度对于产品的打磨效果具有决定性的影响。如果力控技术不够精确或反应不够迅速,那么打磨效果就可能受到影响,导致产品无法达到预期的质量标准。因此,要想实现金属工件的高效自动化打磨,就必须解决机器人力控技术的问题。虽然自动化打磨技术具有诸多优势,但在实际应用中仍需要解决一些技术难题。其中,如何精确控制打磨力度是一个关键的问题。只有通过不断的技术创新和研发,我们才能攻克这一难题,实现金属工件的高效、安全、稳定的自动化打磨。无锡打磨机械手