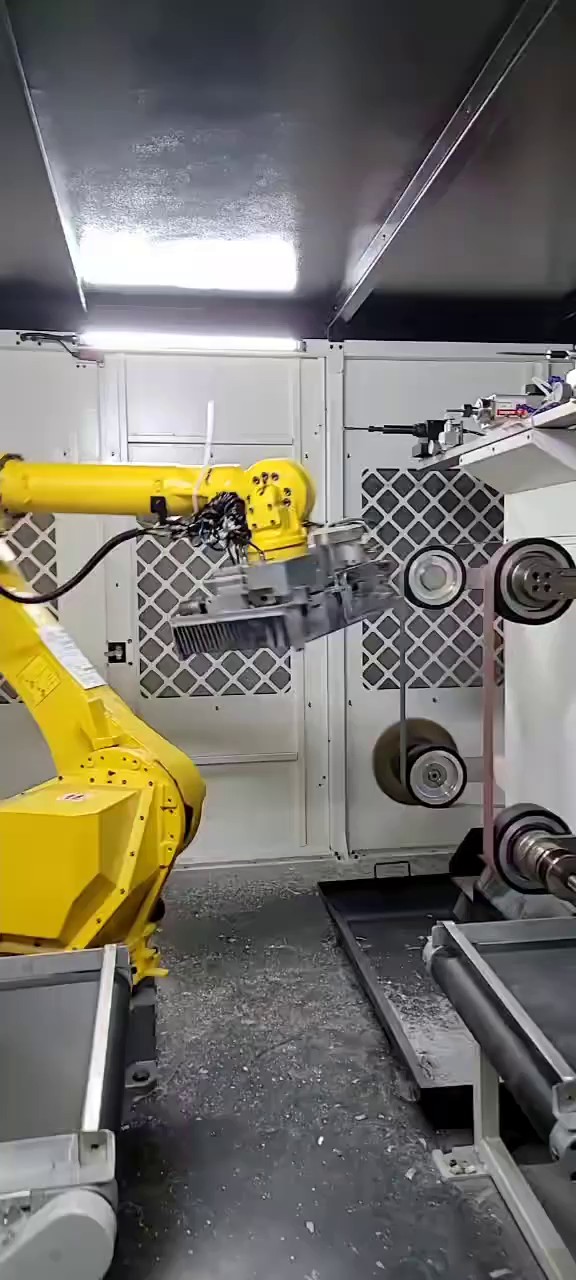
对于需要在受限环境中与环境产生力交互的机器人任务,结合位置控制和力控制是非常必要的。这样不仅可以确保机器人能够精确地执行其任务,还可以保护机器人和周围环境免受潜在伤害。打磨,作为一种普遍应用的表面改性技术,对于提升产品质量和性能具有关键性作用。传统的打磨方法主要依赖人工完成,但这种方法效率低下,工作周期长,且精度难以保证,导致产品的一致性和均一性受到严重影响。人工去毛刺的过程中,不仅噪音大、速度慢,而且会产生大量粉尘,对操作人员的健康构成严重威胁。适用于大批量生产,提高产能,缩短交货期。北京铸件打磨机器人
打磨机械手通过其精确的力控制和适应性强的特点,成功解决了传统打磨过程中存在的问题,为制造行业带来了更高的生产效率、更好的产品和更低的成本。在未来,随着技术的不断进步,打磨机械手有望在更多领域发挥更大的作用。在去除毛刺的打磨加工过程中,影响毛刺打磨效果的因素繁多且关键。这其中,刀具、主轴转速、切屑速度以及机器人的运动轨迹都是不可忽视的要素。尤其是机器人的运动轨迹,它直接决定了加工过程中的运动路径。尽管我们深知机器人在重复定位方面的精度极高,但在编程阶段,机器人的点位通常依赖于示教过程。示教过程需要人工进行位置确认,这就不可避免地引入了人为误差,使得点位存在偏差。这种偏差会直接影响到切屑效果,造成加工后的表面质量不均匀。金华铝件打磨抛光效果均匀,提升产品外观质量,增强市场竞争力。
连续轨道操控则更注重打磨机器人在达到目标点的过程中所遵循的路径。这种操控方式要求机器人能沿着预设的连续路径进行精确的运动,从而实现对复杂形状和曲面的精确打磨。因此,连续轨道操控通常用于需要高精度、高稳定性的打磨任务中。力(力矩)操控则是一种更高级的操控方式,它要求打磨机器人在作业过程中能根据实时的力反馈进行动态调整,以实现对不同材质、不同表面状况的工件的精确打磨。这种操控方式需要机器人具备高度灵敏的力感知和反馈系统,以及强大的实时处理能力。
力控技术的精度和反馈速度对于产品的打磨效果具有决定性的影响。如果力控技术不够精确或反应不够迅速,那么打磨效果就可能受到影响,导致产品无法达到预期的质量标准。因此,要想实现金属工件的高效自动化打磨,就必须解决机器人力控技术的问题。虽然自动化打磨技术具有诸多优势,但在实际应用中仍需要解决一些技术难题。其中,如何精确控制打磨力度是一个关键的问题。只有通过不断的技术创新和研发,我们才能攻克这一难题,实现金属工件的高效、安全、稳定的自动化打磨。适用于金属冲压件的抛光,如手机壳、家电面板等。

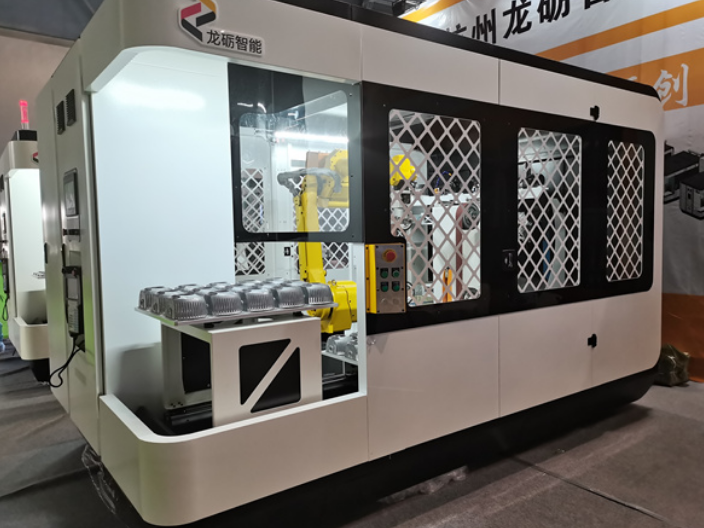
在制造业中,抛光打磨这一环节虽然基础,但其在整个生产流程中占据了相当重要的位置,成本甚至可以达到总成本的30%。这一环节对工人的体力和耐力有着极高的要求,因为涉及到长时间、强度高的手工操作。为了提升生产效率、降低成本,并确保产品质量的一致性,抛光打磨机器人的应用变得至关重要。抛光打磨机器人不仅可以替代2至6名工人,还能以每天超过20小时的工作时长持续作业,不受疲劳、情绪波动或其他人为因素的干扰。这种高效的工作模式使得机器人的生产效率远超人工,甚至可以达到人工的3至5倍。采用高速旋转的砂轮进行打磨,可以快速去除金属表面的毛刺和瑕疵。盐城小型打磨机抛光机
机器设计人性化,降低工人劳动强度。北京铸件打磨机器人
传统的工业机器人通过其高效且精确的位置控制,遵循着控制系统为其设定的路径,在空间中进行精确的移动,进而出色地完成如搬运、检测、喷涂、上下料等一系列作业。然而,随着工业自动化步伐的加快,机器人正逐渐扩展其应用领域,涉足更普遍的工业环境。在这种背景下,单纯的位置控制已逐渐显示出其局限性,特别是在那些需要机器人与环境进行交互作用的应用场景中。在工业制造领域,随着产品工艺标准的不断提高,许多新的制造工艺已无法通过传统工业机器人的位置控制来完美实现。例如,对于精密零部件的柔性装配,或者一致性较差的复杂曲面打磨等任务,传统的位置控制方法可能因工件的一致性问题导致位置误差,从而引发系统瞬间的过载,这不仅可能损坏工件,还可能对机器人本身造成损害。因此,为了满足这些更复杂的工艺需求,我们必须对传统工业机器人的控制方式进行创新和改进。北京铸件打磨机器人