力(力矩)操控方法在打磨机器人的应用中起着至关重要的作用。当机器人执行如安装、抓放物体等任务时,除了需要精确的定位,还要求所施加的力或力矩必须适中。为了实现这一目标,就需要使用到(力矩)伺服方法。这种操控方法的原理与位置伺服操控原理基本相似,但其输入量和反馈量不是位置信号,而是力(力矩)信号。因此,这种控制体系中必须有相应的力(力矩)传感器。在某些情况下,还会使用到接近、滑动等传感功能,以实现自适应式操控。适用于航空航天、汽车、电子等行业的金属件抛光。河南电打磨机
抛光打磨行业虽然历史悠久且传统,但却面临着诸多亟待解决的问题。为了应对这些挑战,行业需要积极寻求创新和发展,探索更加高效、环保的生产方式和技术手段。只有这样,才能推动行业的可持续发展,为社会创造更多的价值。打磨机器人的实用化进程可从多个维度获得证实。观察其应用情况,众多企业和产品已在深入行业方面进行了大量投资与努力。通过对相关使用者的详尽调查,我们可以看到,五金卫浴、建筑五金、汽车零部件、餐具行业、工艺品行业等众多领域,都展现出了明显的进步。这些行业的新型机械设备普遍采用了打磨机器人技术,且需求呈现出多样化的特点。嘉兴机器手打磨适用于大批量生产,提高产能,缩短交货期。

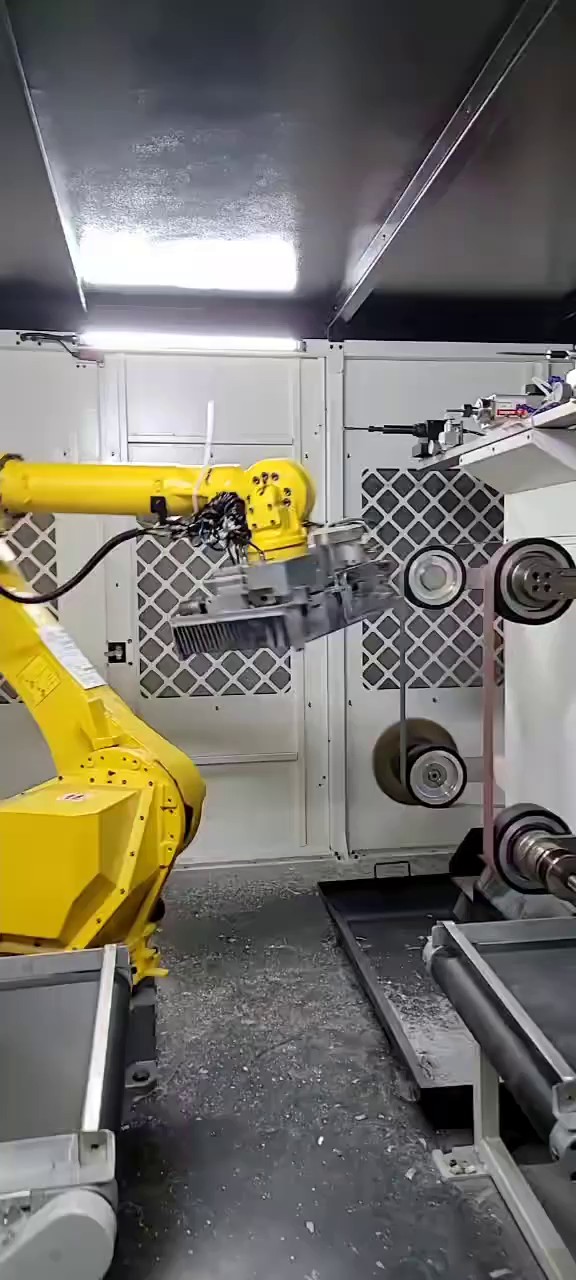
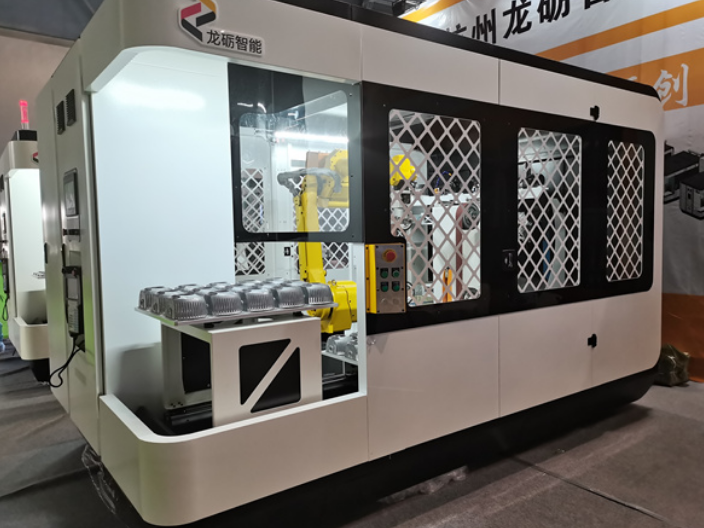
对于企业财产而言,安全则意味着整个生产过程的稳定与可控。自动化生产线的一个明显特点就是其规律性,这种规律性为生产过程的稳定与可控提供了坚实的基础。机器人抛光打磨的应用,就是机器换人技术的一个具体体现。它们能够准确地执行预设的任务,从而替代人类在恶劣的工作环境中进行操作。机器人工作站的设计充分考虑了安全因素。在工作站外部,设置了安全防护栏,确保非操作人员无法进入危险区域。而工作站内部,则配备了先进的传感与驱动控制装置,这些装置能够实时监测机器人的工作状态,并在必要时进行自动调整或停机,从而确保整个工作过程的稳定与安全。
再者,抛光打磨是一项需要高度专业技能的工作,工人的技术水平直接影响着产品的质量和生产效率。然而,随着年轻一代对工作环境和待遇要求的提高,他们越来越不愿意从事这个行业。这导致了企业面临着严重的人力资源短缺问题,尤其是在技术熟练的工人方面。新员工的培训和熟练过程往往需要花费大量的时间和精力,这无疑增加了企业的运营成本和时间成本。人工抛光打磨的另一个问题是容易受到人为因素的干扰。由于工人的技术和情绪波动等因素,产品的质量和生产效率往往会出现不稳定的情况。这不仅影响了企业的声誉和市场竞争力,还可能导致客户流失和订单减少。适用于金属家具、卫浴五金等领域的抛光。

机器人打磨具有可再开发性。用户可以根据不同的样件进行二次编程,以适应不同的打磨需求。这种灵活性使得机器人打磨工具具有更普遍的应用前景,可以满足不同行业和领域的需求。机器人搭配力控打磨工具在提高打磨质量、提高生产效率、改善工人劳动条件、降低对工人操作技术的要求以及具有可再开发性等方面具有明显的优势。相比传统的人工打磨方式,机器人打磨具有更高的效率、更好的质量和更普遍的应用前景。因此,越来越多的企业开始采用机器人打磨技术来提升其生产线的竞争力和效益。适用于金属工艺品、奖牌等产品的抛光。毛刺打磨机器人定制价格
抛光机打磨机具备自动报警功能,保障生产安全。河南电打磨机
传统的工业机器人通过其高效且精确的位置控制,遵循着控制系统为其设定的路径,在空间中进行精确的移动,进而出色地完成如搬运、检测、喷涂、上下料等一系列作业。然而,随着工业自动化步伐的加快,机器人正逐渐扩展其应用领域,涉足更普遍的工业环境。在这种背景下,单纯的位置控制已逐渐显示出其局限性,特别是在那些需要机器人与环境进行交互作用的应用场景中。在工业制造领域,随着产品工艺标准的不断提高,许多新的制造工艺已无法通过传统工业机器人的位置控制来完美实现。例如,对于精密零部件的柔性装配,或者一致性较差的复杂曲面打磨等任务,传统的位置控制方法可能因工件的一致性问题导致位置误差,从而引发系统瞬间的过载,这不仅可能损坏工件,还可能对机器人本身造成损害。因此,为了满足这些更复杂的工艺需求,我们必须对传统工业机器人的控制方式进行创新和改进。河南电打磨机