点位操控(PTP)是一种只关注打磨机器人末端执行器在作业空间中特定离散点位置和姿态的操控方式。在操作过程中,只要求打磨机器人能迅速、准确地在相邻各点之间移动,而对达到目标点的移动路径并无特定要求。这种操控方式的两个主要技术指标是定位精度和运动时间。由于其实现相对简单,且对定位精度的要求相对较低,因此,点位操控常常被用于如上下料、转移、点焊以及在电路板上安装元件等只需要在目标点保持末端执行器精确位置和姿态的任务中。尽管这种操控方式相对简单,但要实现2~3um的高定位精度却是一项极具挑战性的任务。机器具备自动计数功能,便于生产管理。数控打磨抛光机供货公司
智能操控则是未来机器人技术的重要发展方向。通过引入人工智能、机器学习等先进技术,使打磨机器人能自主识别工件的形状、材质和表面状况,并自动选择合适的打磨策略和参数,从而实现高度自动化、智能化的打磨作业。打磨机器人的多样化操控方式使其能适应各种不同的作业需求,从而在市场中占据重要地位。而随着技术的不断发展,我们可以期待打磨机器人在未来能发挥出更大的潜力,为工业生产和人类生活带来更多的便利和价值。安全,这是一个相对于人类与财产而言的至关重要的概念。对于人类而言,确保安全意味着远离一切可能带来伤害或损害的环境。在这一点上,机器换人技术的出现扮演了关键的角色。它不仅能够有效地降低人类在危险环境中的暴露,而且通过自动化作业来保障人类的安全。南京双头打磨机适用于大尺寸金属件的抛光,如金属板、型材等。

打磨机器人的多样化操控方法使得它能够在各种作业环境中发挥出较大的效能。无论是点位操控、接连轨道操控、力(力矩)操控还是智能操控,它们都为打磨机器人的普遍应用提供了有力的技术支持。在现今的机器人市场中,打磨机器人无疑是使用普遍且技术成熟的一种。其普遍的应用主要归功于其多样化的操控方式。根据作业任务的不同需求,打磨机器人主要可以分为点位操控、连续轨道操控、力(力矩)操控和智能操控这四种方式。下面,我们将详细探讨这些操控方式的特性和功能。
机器人打磨改善了工人的劳动条件。在一些有害环境下,如高温、高湿、粉尘等,工人长时间工作可能会对身体造成危害。而机器人可以在这些恶劣环境下长期工作,有效保护工人的健康和安全。机器人打磨降低了对工人操作技术的要求。传统的打磨工作需要工人具备较高的技能水平和经验,而机器人打磨则可以通过预设的程序和参数来实现高精度的打磨作业,无需工人具备专业的技能。这降低了对工人操作技术的要求,使得更多的工人可以参与到这一工作中来。抛光机打磨机具备自动冷却系统,防止设备过热。

压铸成型的工件外尺寸往往存在误差。当使用固定的切削路径进行加工时,这些尺寸误差同样会导致切削效果的不均匀。过切或切削不足的情况在这种背景下是无法完全避免的,这也是当前许多机器人去毛刺设备在实际应用中效果不佳或失败的主要原因。因此,要优化和提升机器人去毛刺的加工效果,不仅需要关注硬件方面的因素,如刀具、主轴转速和切屑速度等,还需在机器人的编程和示教过程中,尽量减少人为误差,提高点位的精确性。针对压铸件尺寸误差的问题,也需通过更加智能和灵活的切削路径规划来加以解决。这些措施的综合应用,将有助于明显提升机器人去毛刺的加工效果,从而满足更高标准的生产要求。机器具备自动抛光和打磨功能,实现一站式处理。机器人打磨机规格
适用于各种金属材质的抛光处理,如不锈钢、铁件等。数控打磨抛光机供货公司
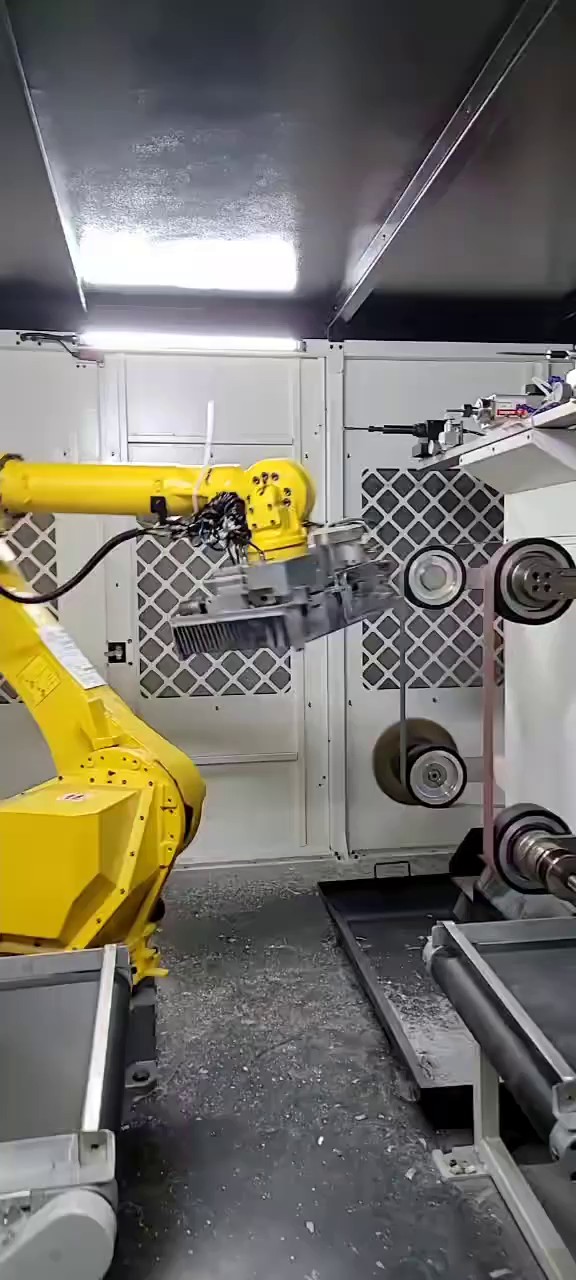
大部分金属工件在完成基础的焊接、铸造等工序后,仍需经过打磨、抛光、去倒角等精细化修整,才能满足验收的合格标准。这些精细化修整工序对于力度的控制要求极高,这也是目前自动化打磨去毛刺作业难以完全取代人工的主要原因。因此,为了实现工业制造的全方面自动化,我们必须寻求新的技术突破,以更精确地控制机器人的操作力度,从而确保工件的加工质量,提高生产效率,降低人工成本,为工业制造的转型升级提供强有力的技术支持。通过实施力的柔性控制,柔性打磨力控系统为企业实现打磨过程的自动化提供了有力支持。这一创新技术使得原本依赖人力的打磨工作得以自动化完成,从而大幅提升了生产效率和产品质量。数控打磨抛光机供货公司