金属工件在完成如焊接、铸造等基础加工后,还需经过打磨、抛光、去倒角等精细修整,以确保满足严格的验收标准。这些精细化处理步骤对于工件的质量和性能至关重要。然而,这些过程中产生的弥漫性粉尘、腐蚀性切屑液以及嘈杂的噪音,都可能对操作人员的健康和安全构成威胁。传统的人工打磨方式还存在生产效率低下、产品质量不稳定以及产品成型一致性差等问题,给生产流程带来了很大的不确定性和风险。自动化打磨技术虽然能够解决人工打磨的诸多问题,但在实际操作中却面临着技术上的挑战。其中,比较大的难点在于如何精确控制打磨力度。这是因为,打磨工具的精度和一致性在很大程度上取决于其与工件接触面是否能够保持恒定的压力。为了实现这一目标,我们需要利用实时力控技术来精确控制工业机器人在打磨过程中的磨削力。选购打磨机器人时我们需要考虑打磨机器人的性能参数。四川迷你打磨机
打磨机械手通过其精确的力控制和适应性强的特点,成功解决了传统打磨过程中存在的问题,为制造行业带来了更高的生产效率、更好的产品和更低的成本。在未来,随着技术的不断进步,打磨机械手有望在更多领域发挥更大的作用。在去除毛刺的打磨加工过程中,影响毛刺打磨效果的因素繁多且关键。这其中,刀具、主轴转速、切屑速度以及机器人的运动轨迹都是不可忽视的要素。尤其是机器人的运动轨迹,它直接决定了加工过程中的运动路径。尽管我们深知机器人在重复定位方面的精度极高,但在编程阶段,机器人的点位通常依赖于示教过程。示教过程需要人工进行位置确认,这就不可避免地引入了人为误差,使得点位存在偏差。这种偏差会直接影响到切屑效果,造成加工后的表面质量不均匀。北京打磨去毛刺设备保持打磨机器人的良好运行需培训机器人操作员。

接连轨道操控方法(CP)是一种对打磨机器人末端执行器在工作空间中的位置和姿态进行连续控制的方法。该方法要求打磨机器人严格遵循预设的轨道和速度,在一定的精度范围内进行运动,且速度可控,轨道平滑,运动平稳,以完成作业任务。在这种操控方式下,打磨机器人的各个关节需要连续、同步地进行相应的运动,从而使其末端执行器形成连续的轨道。该操控方法的主要技术指标包括打磨机器人末端执行器位姿的轨道跟踪精度及运动的平稳性。因此,这种操控方法普遍应用于弧焊、喷漆、去毛边和检测作业等机器人领域。
力控制传感器的作用不仅于此,它们还能帮助机械手根据零件的形状和大小调整磨具的路径,从而实现对各种形状和大小的物体进行打磨。这些传感器确保了机械手始终能够准确地定位并完成打磨任务。与人类工人相比,打磨机械手在精度和稳定性上具有明显优势,尤其是在处理形状多变的零件时。人类工人在长时间的工作中可能会因为疲劳或其他原因而偏离正确的打磨方向,而打磨机械手则能够始终保持一致的精度和质量。这种精度保证了每个制造出来的零件都能达到光滑、均匀且高质量的光洁度,从而实现了产品质量的稳定性和一致性。选购打磨机器人需要综合考虑性能、适用范围、安全性和成本回报等因素。

压铸成型的工件外尺寸往往存在误差。当使用固定的切削路径进行加工时,这些尺寸误差同样会导致切削效果的不均匀。过切或切削不足的情况在这种背景下是无法完全避免的,这也是当前许多机器人去毛刺设备在实际应用中效果不佳或失败的主要原因。因此,要优化和提升机器人去毛刺的加工效果,不仅需要关注硬件方面的因素,如刀具、主轴转速和切屑速度等,还需在机器人的编程和示教过程中,尽量减少人为误差,提高点位的精确性。针对压铸件尺寸误差的问题,也需通过更加智能和灵活的切削路径规划来加以解决。这些措施的综合应用,将有助于明显提升机器人去毛刺的加工效果,从而满足更高标准的生产要求。由于机器人的操作精度高,可以准确地控制打磨的力度、速度和方向,从而确保产品在各个方面的质量一致性。打磨设备制造商
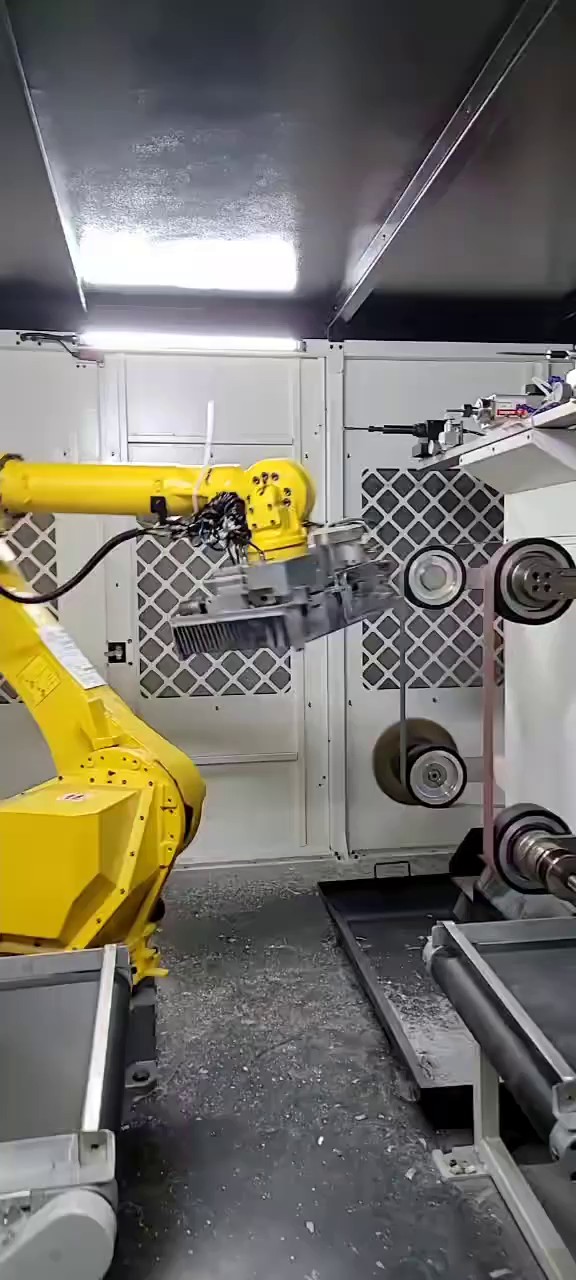
打磨机器人可以通过精确的程序控制完成复杂的打磨任务,进一步提高工作效率。四川迷你打磨机
柔性力控打磨技术的引入,极大地弥补了国产机器人在刚性不足和精度较低方面的缺陷。其高精度补偿功能以及简洁易用的操作方式,不仅提升了打磨的工艺效果,更确保了打磨过程的一致性和稳定性。这一技术的运用,为工业机器人在打磨领域的应用打开了新的可能性,为实现高效、高质量的批量生产提供了有力支持。机器人打磨技术普遍应用于卫浴、航空、汽车、工业零件、医疗器械以及民用产品等多个行业,特别针对那些要求高精度的打磨抛光作业。这一技术的主要功能涵盖了铸件表面的精细打磨、棱角的毛刺去除、焊缝的平滑处理、内腔和内孔的毛刺去除,以及孔口和螺纹口的精细加工等。四川迷你打磨机